
Abstract
Manipulation of the domain wall propagation in magnetic wires is a key practical task for a number of devices including racetrack memory and magnetic logic. Recently, curvilinear effects emerged as an efficient mean to impact substantially the statics and dynamics of magnetic textures. Here, we demonstrate that the curvilinear form of the exchange interaction of a magnetic helix results in an effective anisotropy term and Dzyaloshinskii–Moriya interaction with a complete set of Lifshitz invariants for a one-dimensional system. In contrast to their planar counterparts, the geometrically induced modifications of the static magnetic texture of the domain walls in magnetic helices offer unconventional means to control the wall dynamics relying on spin-orbit Rashba torque. The chiral symmetry breaking due to the Dzyaloshinskii–Moriya interaction leads to the opposite directions of the domain wall motion in left- or right-handed helices. Furthermore, for the magnetic helices, the emergent effective anisotropy term and Dzyaloshinskii–Moriya interaction can be attributed to the clear geometrical parameters like curvature and torsion offering intuitive understanding of the complex curvilinear effects in magnetism.
Similar content being viewed by others


Introduction
Assessing spin textures of three-dimensionally curved magnetic thin films1,2,3, hollow cylinders4,5,6 or wires7,8,9,10 has become a dynamic research field. These 3D-shaped systems possess striking novel fundamental properties originating from the curvature-driven effects, such as magnetochiral effects3,11,12,13 and topologically induced magnetization patterns13,14,15. To this end, a general fully 3D approach was put forth recently to study dynamical and static properties of arbitrary curved magnetic shells and wires16,17. Due to the curvature and torsion in wires17 (Gaussian and mean curvatures in the case of shells16) two additional interaction terms appear in the exchange energy functional: a geometrically induced anisotropy term which is a bilinear form of the curvature and torsion, and an effective Dzyaloshinskii–Moriya interaction (DMI) term (Lifshitz invariants), which depends linearly on the curvature and torsion. In the framework of this approach, the existence of topologically induced patterns in Möbius rings15 and new magnetochiral effects16,17 were predicted.
In addition to these rich physics, the application potential of 3D-shaped objects is currently being explored as magnetic field sensorics for magnetofluidic applications18,19, spin-wave filters20,21, advanced magneto-encephalography devices for diagnosis of epilepsy at early stages22,23,24 or for energy-efficient racetrack memory devices25,26. The propagation of domain walls in a magnetic wire27 for racetrack memory25,28 or magnetic domain wall logic29,30 applications induced by spin-polarized currents is already widely explored31. In contrast, spin-orbitronics32,33, based on current-induced spin-orbit torques, launches the new concept of low energy spintronic devices.
Caused by the structural inversion symmetry, multilayers consisting of magnetic metal with nonmagnetic metal and oxide on contralateral sides like Pt/Co/AlxO can support spin-orbit torques acting on the localized magnetic moments due to the Rashba and spin Hall effects34,35. The Rashba field, produced by a charge current in these structures is considered to be one of the most efficient ways to act on the magnetization patterns34. However, in widely used planar devices, transverse domain walls are not affected by the Rashba effect36. Here, we demonstrate that the impact of the curvilinear effects on the magnetic texture of the domain walls in helical wires allows for their efficient displacement using spin-orbit Rashba torque. The geometrically induced anisotropy and DMI affect both the spatial orientation of the transverse (head-to-head and tail-to-tail) domain walls in helices as well as the magnetization distribution in the domain wall. As a consequence, the chiral symmetry breaking is characteristic for the wall structure: the direction of the magnetization rotation in the wall is opposite for the left- and right-handed helices. The domain wall mobility is proportional to the product of curvature and torsion of the wire; it depends on the topological charge of the wall. The direction of the domain wall motion is determined by the sign of the product of the helix chirality and domain wall charge. Furthermore, a remarkable feature of this 3D geometry is that its curvature and torsion are coordinate independent. Therefore, all effects coupled with an interplay between the geometry of the system and the geometry of the magnetic texture may be presented here in a most clear and lucid style. The obtained results are general and valid for any thin wire with nonzero torsion.
Results
We describe a helix curve by using its arc-length parametrization in terms of curvature–torsion:

where s is the arc length, R is the helix radius, P is the pitch of the helix,  is the helix chirality and
is the helix chirality and  . A helix is characterized by the constant curvature
. A helix is characterized by the constant curvature  and torsion
and torsion  .
.
The magnetic properties are described using assumptions of classical ferromagnets with uniaxial anisotropy directed along the wire. The energy of the helix wire reads37

Here  , where the positive parameter K is a magnetocrystalline anisotropy constant of easy-tangential type, the term
, where the positive parameter K is a magnetocrystalline anisotropy constant of easy-tangential type, the term  stems from the magnetostatic contribution37, Ms is the saturation magnetization, and S is the cross-section area. The exchange energy density reads
stems from the magnetostatic contribution37, Ms is the saturation magnetization, and S is the cross-section area. The exchange energy density reads  , where m is the magnetization unit vector,
, where m is the magnetization unit vector,  is the characteristic magnetic length (domain wall width), and A is an exchange constant. The anisotropy energy density is
is the characteristic magnetic length (domain wall width), and A is an exchange constant. The anisotropy energy density is  where ean is the unit vector along the anisotropy axis, which is assumed to be oriented along the tangential direction. The easy-tangential anisotropy in a curved magnet is spatially dependent. Therefore, it is convenient to represent the energy of the magnet in the curvilinear Frenet–Serret reference frame with et being a tangential (T), en being a normal (N) and eb being a binormal (B) vector, respectively (TNB basis).
where ean is the unit vector along the anisotropy axis, which is assumed to be oriented along the tangential direction. The easy-tangential anisotropy in a curved magnet is spatially dependent. Therefore, it is convenient to represent the energy of the magnet in the curvilinear Frenet–Serret reference frame with et being a tangential (T), en being a normal (N) and eb being a binormal (B) vector, respectively (TNB basis).
In the curvilinear frame, the exchange energy has three different contributions17,  . The first term
. The first term  , describes the isotropic part of the exchange expression, which has the same form as for a straight wire. Here and below the prime denotes the derivative with respect to the dimensionless coordinate u = s/ℓ. The second term,
, describes the isotropic part of the exchange expression, which has the same form as for a straight wire. Here and below the prime denotes the derivative with respect to the dimensionless coordinate u = s/ℓ. The second term,  , is a curvature induced effective DMI, where the components of the Frenet–Serret tensor
, is a curvature induced effective DMI, where the components of the Frenet–Serret tensor  are linear with respect to the reduced curvature and torsion
are linear with respect to the reduced curvature and torsion

respectively. The last term,  , describes a geometrically induced effective anisotropy interaction, where the components of the tensor
, describes a geometrically induced effective anisotropy interaction, where the components of the tensor  are bilinear with respect to the curvature and torsion, see Supplementary Materials for details. Two additional contributions (effective DMI and effective anisotropy) naturally appear in the curvilinear reference frame similar to contributions to the kinetic energy of the mechanical particle in the rotating frame with Coriolis force (linear with respect to velocity) and centrifugal force (bilinear with respect to velocity).
are bilinear with respect to the curvature and torsion, see Supplementary Materials for details. Two additional contributions (effective DMI and effective anisotropy) naturally appear in the curvilinear reference frame similar to contributions to the kinetic energy of the mechanical particle in the rotating frame with Coriolis force (linear with respect to velocity) and centrifugal force (bilinear with respect to velocity).
The emergent effective anisotropy leads to the modification of the equilibrium magnetic states37. Here, we consider helices with relatively small curvature possessing quasitangential magnetization distribution shown in Fig. 1(a). For further discussion it is instructive to project the magnetization onto the local rectifying surface, which coincides with the supporting surface of the helix [yellow cylinder in Fig. 1(a)]. The top view is plotted for the right-handed helix [σ > 0, Fig. 1(c)] and for the left-handed one [σ < 0, Fig. 1(d)].

(a) Schematics of magnetic helix with the easy-tangential anisotropy (magnetic moments are shown with red arrows, TNB-basis is shown with green arrows. (b) The rotation angle ψ for different torsions σ and curvatures ϰ. The onion state is energetically preferable in the grey region37. Solid lines correspond to analytics37, filled circles and open squares correspond to SLaSi and Nmag simulations, respectively; see Methods for details. (c,d) Discrete magnetic moments at equilibrium for right- and left-handed helices, respectively. The effective anisotropy axis is shown with thin black arrow e1.
The influence of the curvature and torsion can be treated as an effective magnetic field  acting along the binormal direction17. This field causes a tilt of the the equilibrium magnetization from the tangential direction by an angle37:
acting along the binormal direction17. This field causes a tilt of the the equilibrium magnetization from the tangential direction by an angle37:

see Fig. 1(b) and Supplementary Eq. (S3) for details. The symbols represent the results of the spin-lattice simulations using the package SLaSi without magnetostatics and Nmag simulations of a magnetically soft wire, see Methods for details: the analysis shows that the model is adequate for soft magnets with  .
.
Now we can rotate the reference frame in a local rectifying surface by the angle ψ (see Supplementary for details). The magnetization in the rotated ψ-frame { e1, e2, e3} reads

where magnetization angular variables θ and ϕ depend on the spatial and temporal coordinates. Using this reference frame we can diagonalize the effective anisotropy energy density of the helix wire (Supplementary Eqs. (S3)–(S5) for details):

The coefficient  characterizes the strength of the effective easy-axis anisotropy while
characterizes the strength of the effective easy-axis anisotropy while  gives the strength of the effective easy-surface anisotropy. The parameters
gives the strength of the effective easy-surface anisotropy. The parameters  and
and  are the effective DMI constants. We note that the energy (2) has the general form of the energy density for 1D biaxial magnets with an intrinsic DMI and contains the complete set of the Lifshitz invariants. Hence, effective DMI constants
are the effective DMI constants. We note that the energy (2) has the general form of the energy density for 1D biaxial magnets with an intrinsic DMI and contains the complete set of the Lifshitz invariants. Hence, effective DMI constants  and
and  can include other contributions, e.g. the intrinsic DMI or DMI due to the structural inversion asymmetry40,41,42.
can include other contributions, e.g. the intrinsic DMI or DMI due to the structural inversion asymmetry40,41,42.
In the case of small curvature and torsion the geometrically induced anisotropy and DMI constants can be attributed to the geometrical parameters of the object:

The possible static magnetization structures can be found by variation of the total energy functional with density (2). The homogeneous equilibrium state (quasitangential state) is described by θh = 0 and θh = π, which corresponds to the two possible directions of the helix magnetization.
Static domain wall
One of the simplest inhomogeneous magnetization distribution in a nanowire is a transverse domain wall, which connects two possible equilibrium states. We start our analysis with general remarks about the domain wall described by the energy functional with the density (2), which can be applied for a wide class of 1D magnets also with the intrinsic DMI.
The structure of the domain wall can be described analytically for  . This case corresponds to the uniaxial ferromagnet with an additional
. This case corresponds to the uniaxial ferromagnet with an additional  DMI term. For such a system there is an exact analytical solution of static equations of the domain wall type:
DMI term. For such a system there is an exact analytical solution of static equations of the domain wall type:

Here p = ±1 is a domain wall topological charge: p = 1 corresponds to kink (head-to-head domain wall) and p = −1 corresponds to antikink (tail-to-tail domain wall). The domain wall width δ and the slope ϒ are as follows:

In the uniaxial magnet with the anisotropy parameter  the typical domain wall width without DMI reads
the typical domain wall width without DMI reads  . One can see that the presence of DMI causes broadening of the wall. Furthermore, the domain wall is not perpendicular to the wire length and is titled by an angle determined by
. One can see that the presence of DMI causes broadening of the wall. Furthermore, the domain wall is not perpendicular to the wire length and is titled by an angle determined by  constant. The slope of the azimuthal angle
constant. The slope of the azimuthal angle  . This behaviour is similar to the known domain wall inclination in magnetic stripes caused by the intrinsic DMI43.
. This behaviour is similar to the known domain wall inclination in magnetic stripes caused by the intrinsic DMI43.
In the following we proceed with the investigation of the finite curvature effects on the magnetization distribution in domain walls in helices. We will apply a variational approach by using (3) as a domain wall Ansatz with the domain wall width δ, initial phase Φ, and the slope ϒ being the variational parameters. By inserting Eq. (3) into the energy density functional (2) and integrating over the arclength variable s, we obtain

The presence of the effective DMI with the constant  breaks the symmetry of the domain walls with opposite topological charges p, which is coupled with the domain wall phase Φ: for the small enough torsion and curvature the energetically preferable domain wall with the topological charge p has the equilibrium phase Φ = (1 + p)π/2. In the case
breaks the symmetry of the domain walls with opposite topological charges p, which is coupled with the domain wall phase Φ: for the small enough torsion and curvature the energetically preferable domain wall with the topological charge p has the equilibrium phase Φ = (1 + p)π/2. In the case  , one can find
, one can find

The variational parameters (5) coincide with parameters (4) of the exact solution obtained in the case  . Thus, the approximation of vanishing curvatures describe the domain wall statics for small enough ϰ and σ.
. Thus, the approximation of vanishing curvatures describe the domain wall statics for small enough ϰ and σ.
The comparison of these predictions with the 3D spin-lattice simulations using package SLaSi44, and micromagnetic simulations using Nmag45 confirms our theory, see Fig. 2 (the details of simulations are described in Methods). Figure 2(a) represents the untwisted view of the domain wall. The magnetization direction corresponds to the ground state along e1 inside two domains. Inside the head-to-head domain wall the magnetization is directed outward the helix (opposite to en). Qualitatively this is explained by the fact that such a configuration minimizes the magnetization gradient and, therefore, the exchange energy. For the tail-to-tail domain wall the direction of the magnetization tilt is opposite to the head-to-head one. The dependence of the phase slope ϒ (5) on the torsion σ is in good agreement with the simulation data, solid line in Fig. 2(b). Symbols correspond to the results of the simulations carried out for ϰ = 0.1. We performed the spin-lattice simulations without magnetostatics (green circles) and with magnetostatics for a magnetically soft sample (blue filled triangles, the quality factor  equals to zero) as well as magnetically hard sample with Q = 4. The micromagnetic simulations of a thin Permalloy wire (diamonds) are also in good agreement with the spin-lattice simulations and theory. The static head-to-head and tail-to-tail domain walls are well described by the Ansatz (3) with optimal parameters determined by (5), see solid lines in Fig. 2(cd), for ϰ = 0.1, σ = 0.5.
equals to zero) as well as magnetically hard sample with Q = 4. The micromagnetic simulations of a thin Permalloy wire (diamonds) are also in good agreement with the spin-lattice simulations and theory. The static head-to-head and tail-to-tail domain walls are well described by the Ansatz (3) with optimal parameters determined by (5), see solid lines in Fig. 2(cd), for ϰ = 0.1, σ = 0.5.

(a) Schematics of a domain wall in the helix (σ > 0), untwisted view. Magnetic moments (red arrows) lie on the helix wire (blue cylinder), directed along et . Magnetic moments inside domains are parallel to e1. (b) Phase slope ϒ (σ) for ϰ = 0.1 [symbols correspond to simulations and solid line is accordingly to Eq. (5)]. Symbols represent the results of the SLaSi simulations: for anisotropic wire without magnetostatics (model, green circle), magnetically soft wire (blue triangle) and magnetically hard wire (open triangle). Diamonds correspond to the micromagnetic simulations of a magnetically soft sample performed using Nmag, see Methods for details. (c,d) Magnetization angles in the ψ-frame [black arrows in panel (a)] for the head-to-head and tail-to-tail domain walls, respectively; ϰ = 0.1, σ = 0.5. Symbols correspond to simulations (each tenth chain site is plotted), and solid lines to Ansatz (3). Thin grey lines show levels 0, π and centre of the domain wall.
Domain wall dynamics driven by the Rashba spin-orbit torque
Here, we describe the domain wall dynamics in the Rashba spin-orbit system46, where the magnetic wire is adjacent to a nonmagnetic conductive layer with a strong spin-orbit interaction. Spin-orbit interaction is well known to be a source of two possible symmetries of torques, acting on magnetization36: Depending on the microscopic nature of the spin-orbit interaction, the antidamping or Slonczewski torque36,47 can be caused by the spin Hall effect or indirect Rashba effect. In contrast, the field-like torque is due to the spin Hall effect or Rashba effect. The relative importance of these interactions depends on the geometry and types of interfacing materials. For example, in thin magnetic films with spin-independent electron scattering, the antidamping spin transfer torque vanishes48. Accordingly to ref. 36 (see Table 1 of ref. 36), the antidamping torque relying on the spin Hall and indirect Rashba effects does not lead to the motion of head-to-head domain walls independent of the injection geometry of charge current (parallel or perpendicular to the wire). Furthermore, head-to-head domain walls can be moved by the field-like torque relying on the Rashba effect only in the case of perpendicular injection36. In stark contrast to the planar systems, here, we demonstrate that the head-to-head domain walls can be efficiently moved in helix wires relying on the Rashba effect even in the case of the parallel charge current injection.
The Rashba effect typically appears in systems with inversion symmetry broken spin-orbit interaction49. We consider the parallel geometry, in which the ferromagnetic wire is parallel to the spin-orbit layer on the whole length of the wire36. The sketch of the system is shown in Fig. 3(a). The magnetic wire is winded around the conductive layer forming a helix. The electrical charge current j flows along the magnetic wire in the tangential direction et. Under the action of the field-like torque caused by the Rashba effect, the magnetic subsystem is affected by the effective Rashba field36

Symbols correspond to simulations and solid lines are calculated accordingly to Eq. (8). (a) Schematics of the domain wall dynamics: magnetic moments (red arrows) lie on a conductive wire (grey) (direction of the current j along et is shown with magenta arrow). The Rashba field HR acts along eb. (b,c) Wall velocity as a function of the applied field and damping for ϰ = 0.1 and σ = 0.3. The mobility of the head-to-head (d) and tail-to-tail (e) domain walls in weak fields as a function of the reduced torsion. Dashed and dotted lines show asymptotics (9) for ϰ = 0.1 and ϰ = 0.3, respectively. Under the action of the electric current j domain walls move in the opposite directions starting from the central position.

with α being the Rashba parameter,  being the polarization of the carriers in the ferromagnetic layer, μB being the Bohr magneton and n being the unit vector perpendicular to the spin-orbit layer. Note that the Rashba parameter, see Eq. (6), depends on the material properties of the interface and does not depend on the thickness of the conductive layer36,48.
being the polarization of the carriers in the ferromagnetic layer, μB being the Bohr magneton and n being the unit vector perpendicular to the spin-orbit layer. Note that the Rashba parameter, see Eq. (6), depends on the material properties of the interface and does not depend on the thickness of the conductive layer36,48.
In such parallel geometry the Rashba field is always directed perpendicular to the wire. For a straight wire the direction of the Rashba field is transversal to the domain magnetization, hence the field can not push the wall36. However for the helix geometry the equilibrium magnetization direction deviates from the wire direction. The energy density of the interaction with the effective Rashba field is  , where h = HR/HA is the reduced field normalized by the anisotropy field
, where h = HR/HA is the reduced field normalized by the anisotropy field  . There are two components of the magnetic field:
. There are two components of the magnetic field:  is parallel along the domain, hence it pushes the wall. Another one,
is parallel along the domain, hence it pushes the wall. Another one,  is directed along e2. In general, magnetic fields with the transversal component results in the deformation of the domain wall profile and other changes of the characteristic parameters like Walker field and maximal domain wall velocities50,51,52,53. However, in the case of weak fields, we can limit our consideration to the parallel field
is directed along e2. In general, magnetic fields with the transversal component results in the deformation of the domain wall profile and other changes of the characteristic parameters like Walker field and maximal domain wall velocities50,51,52,53. However, in the case of weak fields, we can limit our consideration to the parallel field  only and neglect the dynamical changes of the wall width. Furthermore, we will not take into account the influence of Ørsted fields generated by the charge current.
only and neglect the dynamical changes of the wall width. Furthermore, we will not take into account the influence of Ørsted fields generated by the charge current.
Far below the Walker limit, we can use the generalized q − Φ model43, cf. (3):

where  and
and  , γe being the gyromagnetic ratio.
, γe being the gyromagnetic ratio.
Using  as a pair of time dependent collective coordinates, we obtain the stationary motion of the domain wall (see Methods for details)
as a pair of time dependent collective coordinates, we obtain the stationary motion of the domain wall (see Methods for details)

We checked the theoretically predicted velocities for the domain wall motion (8) by SLaSi and Nmag simulations in the range of effective fields,  , see Fig. 3(b–d) and Methods for details. Symbols correspond to SLaSi and Nmag simulations, solid lines correspond to the theoretical predictions, obtained accordingly to Eq. (8), see also Supplementary Eq. (S3). The domain wall velocity is almost linear with the field, see Fig. 3(b) [with a fixed damping constant η = 0.1]. The inverse linear dependence
, see Fig. 3(b–d) and Methods for details. Symbols correspond to SLaSi and Nmag simulations, solid lines correspond to the theoretical predictions, obtained accordingly to Eq. (8), see also Supplementary Eq. (S3). The domain wall velocity is almost linear with the field, see Fig. 3(b) [with a fixed damping constant η = 0.1]. The inverse linear dependence  is well pronounced in Fig. 3(c). The maximal velocity v = 0.1 shown in Fig. 3(b) for h = 0.02 corresponds to 35 m/s for Permalloy.
is well pronounced in Fig. 3(c). The maximal velocity v = 0.1 shown in Fig. 3(b) for h = 0.02 corresponds to 35 m/s for Permalloy.
The most intriguing effect in the domain wall dynamics is the torsion dependence of the wall motion. The mobility of the domain wall μ = v/h as a function of the helix torsion is plotted in Fig. 3(d,e) for different helix curvatures. In the case of small curvature and torsion  , the wall mobility, accordingly to (8), has the following asymptotic:
, the wall mobility, accordingly to (8), has the following asymptotic:

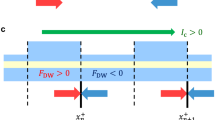
Therefore, the domain wall can move only under the joint action of the curvature and torsion. The direction of the domain wall motion depends on the helix chirality  , see Fig. 4(a,b), where the head-to-head domain wall position is shown at different time moments and Fig. 4(c,d), where the domain wall position is shown as a function of time for different torsions and values of p. The initial domain wall displacement occurs in the positive direction, while the steady-state motion is described by Eq. (8). That is why the close positions of the domain walls in Fig. 4(a,b) occur at different time of 9 ns and 14 ns.
, see Fig. 4(a,b), where the head-to-head domain wall position is shown at different time moments and Fig. 4(c,d), where the domain wall position is shown as a function of time for different torsions and values of p. The initial domain wall displacement occurs in the positive direction, while the steady-state motion is described by Eq. (8). That is why the close positions of the domain walls in Fig. 4(a,b) occur at different time of 9 ns and 14 ns.

Head-to-head domain wall (p = 1) in helices with σ = 0.1 (a) and σ = −0.1 (b) under the action of the Rashba field h = 0.02 (using SI units HR ≈ 10.8 mT). The direction of the electric current (along et) and domain wall motion are shown with violet and dark-green arrows, respectively. Time behaviour of the domain wall position for head-to-head (c) and tail-to-tail (d) domain walls in helices with ϰ = 0.1, see also Supplementary Video. All curves are matched at zero time and coordinate.
In some respect, the effect of chirality sensitive domain wall mobility is similar to the recently found chiral-induced spin selectivity effect54,55 in helical molecules due to the Rashba interaction56.
Discussion
First, we discuss the consequence of the interplay between the curved geometry of the helical wire with the magnetic texture of the transverse domain walls:
-
i
The geometrically induced effective anisotropy causes the tilt of the equilibrium magnetization by the angle ψ with respect to the tangential direction. This rotation angle depends on the product of the curvature and the torsion. Due to the nonzero value of ψ there appears a Rashba field component
 along the magnetization of one of the domains. The field
along the magnetization of one of the domains. The field  pushes the domain wall and thus, the geometrically induced effective anisotropy is the origin of the Rashba field induced domain wall motion in a magnetic helix. There appears curvature induced easy-surface anisotropy. For the helix geometry the anisotropy tends to orient the magnetization within the rectifying surface, i.e. tangentially to the cylinder surface. Additionally, the geometry caused easy-axis anisotropy, favours the orientation of the magnetization along e1 direction.
pushes the domain wall and thus, the geometrically induced effective anisotropy is the origin of the Rashba field induced domain wall motion in a magnetic helix. There appears curvature induced easy-surface anisotropy. For the helix geometry the anisotropy tends to orient the magnetization within the rectifying surface, i.e. tangentially to the cylinder surface. Additionally, the geometry caused easy-axis anisotropy, favours the orientation of the magnetization along e1 direction. -
ii
The more intriguing features of the geometry are connected to the curvatures induced Dzyaloshinskii–Moriya interaction. Two effective DMI terms in the energy (2) correspond to all possible Lifshitz invariants in the 1D case. In this respect our analysis is valid also for 1D systems with an intrinsic DMI as well as for the DMI induced due to the structural inversion asymmetry. Using SI units, one estimates that
 . Using typical values A = 10 pJ/m, we obtain that D1 = 0.28 mJ/m2 for a helix with the radius R = 50 nm and the pitch P = 300 nm; D1 = 0.14 mJ/m2 for R = 100 nm, P = 600 nm. These values are comparable to those estimated from the ab initio calculations for multilayer systems57,58.
. Using typical values A = 10 pJ/m, we obtain that D1 = 0.28 mJ/m2 for a helix with the radius R = 50 nm and the pitch P = 300 nm; D1 = 0.14 mJ/m2 for R = 100 nm, P = 600 nm. These values are comparable to those estimated from the ab initio calculations for multilayer systems57,58. -
iii
It is instructive to compare the geometrically induced DMI in helices with the intrinsic DMI for the untwisted objects. In this work we restricted ourselves by considering the quasitangential ground state of the helix, which is realized for the relatively weak curvatures and torsions (weak effective DMI)37. In case of strong DMI, the helix favours the onion ground state37, where the magnetization is almost homogeneous (in the physical space) due to the strong exchange interaction. At the same time, the magnetization rotates in the curvilinear reference frame. Such a state is an analogue of the spiral state in straight magnets with intrinsic DMI.
-
iv
The geometrically induced DMI drastically changes the internal structure of the transverse domain wall: the azimuthal magnetization angle ϕ rotates inside the wall, see Supplementary Fig. S1. While the domain wall orientation in its centre is determined by the domain wall topological charge p, the direction of the magnetization rotation (i.e. magnetochirality
 ) mainly depends on the helix torsion σ. One can interpret the sign of σ as the helix chirality
) mainly depends on the helix torsion σ. One can interpret the sign of σ as the helix chirality  (different for right-handed helix when σ > 0 and left-handed one when σ < 0). Therefore, the magnetochirality of the domain wall is always opposite to the helix chirality,
(different for right-handed helix when σ > 0 and left-handed one when σ < 0). Therefore, the magnetochirality of the domain wall is always opposite to the helix chirality,  .
. -
v
In order to elucidate the role of the geometrically induced DMI we compare the domain wall structure in a helix with the domain wall in a straight wire of a biaxial magnet without DMI. Figure 5 shows the comparison of the magnetization distribution for these two geometries obtained by the SLaSi simulations. The panel (b) represents the data for a straight wire with the energy (2), where the anisotropy coefficients
 ,
,  correspond to the effective anisotropies in the helix, and DMI constants
correspond to the effective anisotropies in the helix, and DMI constants  . The panel (c) represents the data for a helix with ϰ = 0.1, σ = 0.5. While for the straight wire the magnetization always lies in the plane, mn = 0, the competition between the easy-plane anisotropy and DMI results in the essential coordinate dependence of both normal and binormal magnetization components.
. The panel (c) represents the data for a helix with ϰ = 0.1, σ = 0.5. While for the straight wire the magnetization always lies in the plane, mn = 0, the competition between the easy-plane anisotropy and DMI results in the essential coordinate dependence of both normal and binormal magnetization components.Figure 5: The role of the curvature induced DMI: comparison of the magnetization distribution in a helix and a biaxial straight wire. 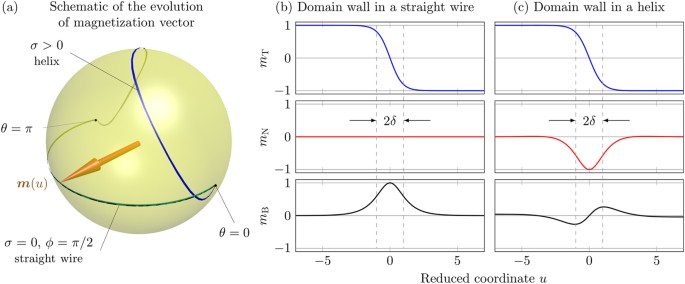
(a) The evolution of the magnetization vector m (u) on a unit sphere for a domain wall in a helix (σ > 0) and straight wire (σ = 0). (b,c) Tangential mt, normal mn and binormal mb magnetization components of the domain wall in a straight wire and a helix: while mt have the similar shape, other components are different due to appearance of the effective DMI.
-
vi
The chiral symmetry breaking strongly impacts the domain wall dynamics and allows the motion of domain walls under the action of the Rashba spin-orbit torque: the direction of motion if determined by the product of the helix chirality and the wall charge (v ∝ σp). Thus, domain walls can be moved only under the combined action of the Rashba effect and geometrical effects, caused by finite curvature and torsion. The wall does not move in the limit of a planar wire, see Fig. 3. The head-to-head and tail-to-tail domain walls move in opposite directions, see Supplementary Video. Our theory describes the domain wall motion both in magnetically hard and soft helices, see comparison in Fig. 2(b) for the phase slope and 3(b,c) for the domain wall mobility, and also Supplementary Fig. S2. The results obtained for this test system are valid well beyond the considered here specific case of helical wires. The Rashba torque driven domain wall motion will be characteristic for any transverse wall present in a curvilinear system with non-zero torsion.
 along the magnetization of one of the domains. The field
along the magnetization of one of the domains. The field  pushes the domain wall and thus, the geometrically induced effective anisotropy is the origin of the Rashba field induced domain wall motion in a magnetic helix. There appears curvature induced easy-surface anisotropy. For the helix geometry the anisotropy tends to orient the magnetization within the rectifying surface, i.e. tangentially to the cylinder surface. Additionally, the geometry caused easy-axis anisotropy, favours the orientation of the magnetization along e1 direction.
pushes the domain wall and thus, the geometrically induced effective anisotropy is the origin of the Rashba field induced domain wall motion in a magnetic helix. There appears curvature induced easy-surface anisotropy. For the helix geometry the anisotropy tends to orient the magnetization within the rectifying surface, i.e. tangentially to the cylinder surface. Additionally, the geometry caused easy-axis anisotropy, favours the orientation of the magnetization along e1 direction. . Using typical values A = 10 pJ/m, we obtain that D1 = 0.28 mJ/m2 for a helix with the radius R = 50 nm and the pitch P = 300 nm; D1 = 0.14 mJ/m2 for R = 100 nm, P = 600 nm. These values are comparable to those estimated from the ab initio calculations for multilayer systems
. Using typical values A = 10 pJ/m, we obtain that D1 = 0.28 mJ/m2 for a helix with the radius R = 50 nm and the pitch P = 300 nm; D1 = 0.14 mJ/m2 for R = 100 nm, P = 600 nm. These values are comparable to those estimated from the ab initio calculations for multilayer systems ) mainly depends on the helix torsion σ. One can interpret the sign of σ as the helix chirality
) mainly depends on the helix torsion σ. One can interpret the sign of σ as the helix chirality  (different for right-handed helix when σ > 0 and left-handed one when σ < 0). Therefore, the magnetochirality of the domain wall is always opposite to the helix chirality,
(different for right-handed helix when σ > 0 and left-handed one when σ < 0). Therefore, the magnetochirality of the domain wall is always opposite to the helix chirality,  .
. ,
,  correspond to the effective anisotropies in the helix, and DMI constants
correspond to the effective anisotropies in the helix, and DMI constants  . The panel (c) represents the data for a helix with ϰ = 0.1, σ = 0.5. While for the straight wire the magnetization always lies in the plane, m
. The panel (c) represents the data for a helix with ϰ = 0.1, σ = 0.5. While for the straight wire the magnetization always lies in the plane, m
Methods
Spin-lattice and micromagnetic simulations
Numerically we study the magnetization textures in a helix and its dynamics using the in-house developed spin-lattice simulator SLaSi44 for anisotropic samples and Nmag45 for magnetically soft samples.
When using SLaSi we consider a classical chain of magnetic moments mi, with  , situated on a helix (1). We use the anisotropic Heisenberg Hamiltonian taking into account the exchange interaction, easy-tangential anisotropy and Rashba field. The dynamics of this system is described by a set of N vector Landau-Lifshitz ordinary differential equations, see ref. 59 for the general description of the SLaSi simulator and ref. 37 for details of the helix simulations. To study the static magnetization distribution spin chains of N = 2000 sites are considered. The domain wall is placed in the centre of the chain. To simulate the magnetization dynamics spin chains of 4000 sites are considered. The domain wall is placed at the 300-th site from one end of the helix and is pushed by the field-like torque to another end. The velocity is measured at the steady state of the domain wall motion before it is driven out off the helix. In all simulations the magnetic length ℓ = 15a with a being the lattice constant and damping η = 0.01 is used except the case when studying the velocity dependence on damping, where η = 0.01…0.1. For all simulations with magnetostatics the exchange length ℓex is used to obtain the effective magnetic length
, situated on a helix (1). We use the anisotropic Heisenberg Hamiltonian taking into account the exchange interaction, easy-tangential anisotropy and Rashba field. The dynamics of this system is described by a set of N vector Landau-Lifshitz ordinary differential equations, see ref. 59 for the general description of the SLaSi simulator and ref. 37 for details of the helix simulations. To study the static magnetization distribution spin chains of N = 2000 sites are considered. The domain wall is placed in the centre of the chain. To simulate the magnetization dynamics spin chains of 4000 sites are considered. The domain wall is placed at the 300-th site from one end of the helix and is pushed by the field-like torque to another end. The velocity is measured at the steady state of the domain wall motion before it is driven out off the helix. In all simulations the magnetic length ℓ = 15a with a being the lattice constant and damping η = 0.01 is used except the case when studying the velocity dependence on damping, where η = 0.01…0.1. For all simulations with magnetostatics the exchange length ℓex is used to obtain the effective magnetic length  .
.
The simulations using the Nmag are performed with the following parameters: exchange constant A = 13 pJ/m, saturation magnetization MS = 860 kA/m and damping η = 0.01 which correspond to Permalloy (Ni81Fe19). These parameters result in the effective anisotropy field of  T and exchange length
T and exchange length  nm. Samples of radius 5 nm and length 1 μm are studied. Thermal effects and anisotropy are neglected. The typical Rashba field h = 0.02 (using SI units HR ≈ 10.8 mT) corresponds to the electrical charge current density j = 10.8 mA/μm2 for the polarization of carriers
nm. Samples of radius 5 nm and length 1 μm are studied. Thermal effects and anisotropy are neglected. The typical Rashba field h = 0.02 (using SI units HR ≈ 10.8 mT) corresponds to the electrical charge current density j = 10.8 mA/μm2 for the polarization of carriers  and Rashba parameter α = 100 peV m34. The static and dynamical properties of the domain walls on a helix are studied in the same way as for the classical chain described above.
and Rashba parameter α = 100 peV m34. The static and dynamical properties of the domain walls on a helix are studied in the same way as for the classical chain described above.
The simulations are performed using the computer clusters of the Bayreuth University60, Taras Shevchenko National University of Kyiv61, Bogolyubov Institute for Theoretical Physics of the National Academy of Sciences of Ukraine62.
Domain wall dynamics
We use the generalized collective coordinate q − Φ approach43 based on the effective Lagrangian formalism. Inserting the Ansatz (7) into the “microscopic” Lagrangian with the density  and the dissipative function
and the dissipative function  , after integration over the wire, we obtain the effective Lagrangian and the effective dissipative function, normalized by
, after integration over the wire, we obtain the effective Lagrangian and the effective dissipative function, normalized by  , as follows:
, as follows:

Here and below overdot means the derivative over  . The effective equations of motion are then obtained as the Euler–Lagrange–Rayleigh equations
. The effective equations of motion are then obtained as the Euler–Lagrange–Rayleigh equations

These equation describe the steady motion of the domain wall  with the constant velocity (8). The corresponding phase
with the constant velocity (8). The corresponding phase  is determined by the equation
is determined by the equation  .
.
Additional Information
How to cite this article: Pylypovskyi, O. V. et al. Rashba Torque Driven Domain Wall Motion in Magnetic Helices. Sci. Rep. 6, 23316; doi: 10.1038/srep23316 (2016).
References
Albrecht, M. et al. Magnetic multilayers on nanospheres. Nat Mater 4, 203–206, doi: 10.1038/nmat1324 (2005).
Ulbrich, T. C. et al. Magnetization reversal in a novel gradient nanomaterial. Phys. Rev. Lett. 96, 077202, doi: 10.1103/PhysRevLett.96.077202 (2006).
Hertel, R. Curvature–induced magnetochirality. SPIN 03, 1340009, doi: 10.1142/S2010324713400092 (2013).
Streubel, R. et al. Imaging of buried 3D magnetic rolled-up nanomembranes. Nano Lett. 14, 3981–3986, doi: 10.1021/nl501333h (2014).
Streubel, R. et al. Magnetic microstructure of rolled-up single-layer ferromagnetic nanomembranes. Adv. Mater. 26, 316–323, doi: 10.1002/adma.201303003 (2014).
Streubel, R. et al. Retrieving spin textures on curved magnetic thin films with full-field soft X-ray microscopies. Nat Comms 6, 7612, doi: 10.1038/ncomms8612 (2015).
Nielsch, K. et al. Hexagonally ordered 100 nm period nickel nanowire arrays. Appl. Phys. Lett. 79, 1360, doi: 10.1063/1.1399006 (2001).
Buchter, A. & Nagel, J. & Rüffer. Reversal mechanism of an individual Ni nanotube simultaneously studied by torque and SQUID magnetometry. Phys. Rev. Lett. 111, 067202, doi: 10.1103/PhysRevLett.111.067202 (2013).
Rüffer, D. et al. Magnetic states of an individual Ni nanotube probed by anisotropic magnetoresistance. Nanoscale 4, 4989, doi: 10.1039/C2NR31086D (2012).
Weber, D. P. et al. Cantilever magnetometry of individual Ni nanotubes. Nano Lett. 12, 6139–6144, doi: 10.1021/nl302950u (2012).
Dietrich, C. et al. Influence of perpendicular magnetic fields on the domain structure of permalloy microstructures grown on thin membranes. Phys. Rev. B 77, 174427, doi: 10.1103/PhysRevB.77.174427 (2008).
Otálora, J., López-López, J., Vargas, P. & Landeros, P. Chirality switching and propagation control of a vortex domain wall in ferromagnetic nanotubes. Appl. Phys. Lett. 100, 072407, doi: 10.1063/1.3687154 (2012).
Kravchuk, V. P. et al. Out-of-surface vortices in spherical shells. Phys. Rev. B 85, 144433, doi: 10.1103/PhysRevB.85.144433. (2012).
Smith, E. J., Makarov, D., Sanchez, S., Fomin, V. M. & Schmidt, O. G. Magnetic microhelix coil structures. Phys. Rev. Lett. 107, 097204, doi: 10.1103/PhysRevLett.107.097204 (2011).
Pylypovskyi, O. V. et al. Coupling of chiralities in spin and physical spaces: The Möbius ring as a case study. Phys. Rev. Lett. 114, 197204, doi: 10.1103/PhysRevLett.114.197204 (2015).
Gaididei, Y., Kravchuk, V. P. & Sheka, D. D. Curvature effects in thin magnetic shells. Phys. Rev. Lett. 112, 257203, doi: 10.1103/PhysRevLett.112.257203 (2014).
Sheka, D. D., Kravchuk, V. P. & Gaididei, Y. Curvature effects in statics and dynamics of low dimensional magnets. J. Phys. A: Math. Theor. 48, 125202, doi: 10.1088/1751-8113/48/12/125202 (2015).
Mönch, I. et al. Rolled-up magnetic sensor: Nanomembrane architecture for in-flow detection of magnetic objects. ACS Nano 5, 7436–7442, doi: 10.1021/nn202351j (2011).
Müller, C. et al. Towards compact three-dimensional magnetoelectronics–magnetoresistance in rolled-up Co/Cu nanomembranes. Appl. Phys. Lett. 100, 022409, doi: 10.1063/1.3676269 (2012).
Balhorn, F. et al. Spin-wave interference in three-dimensional rolled-up ferromagnetic microtubes. Phys. Rev. Lett. 104, 037205, doi: 10.1103/PhysRevLett.104.037205 (2010).
Balhorn, F., Jeni, S., Hansen, W., Heitmann, D. & Mendach, S. Axial and azimuthal spin-wave eigenmodes in rolled-up permalloy stripes. Appl. Phys. Lett. 100, 222402, doi: 10.1063/1.3700809 (2012).
Liu, L., Ioannides, A. & Streit, M. Single trial analysis of neurophysiological correlates of the recognition of complex objects and facial expressions of emotion. Brain Topogr 11, 291–303, doi: 10.1023/A:1022258620435 (1999).
Dumas, T. et al. Meg evidence for dynamic amygdala modulations by gaze and facial emotions. PLoS ONE 8, e74145, doi: 10.1371/journal.pone.0074145 (2013).
Karnaushenko, D. et al. Self-assembled on-chip-integrated giant magneto-impedance sensorics. Adv. Mater. 27, 6582–6589, doi: 10.1002/adma.201503127 (2015).
Parkin, S. S. P., Hayashi, M. & Thomas, L. Magnetic domain-wall racetrack memory. Science 320, 190–194, doi: 10.1126/science.1145799 (2008).
Yan, M., Kákay, A., Gliga, S. & Hertel, R. Beating the Walker limit with massless domain walls in cylindrical nanowires. Phys. Rev. Lett. 104, 057201, doi: 10.1103/PhysRevLett.104.057201 (2010).
Catalan, G., Seidel, J., Ramesh, R. & Scott, J. F. Domain wall nanoelectronics. Rev. Mod. Phys. 84, 119–156 doi: 10.1103/RevModPhys.84.119 (2012).
Hayashi, M., Thomas, L., Rettner, C., Moriya, R. & Parkin, S. S. P. Direct observation of the coherent precession of magnetic domain walls propagating along permalloy nanowires. Nat Phys 3, 21–25, doi: 10.1038/nphys464 (2007).
Allwood, D. A. et al. Submicrometer ferromagnetic NOT gate and shift register. Science 296, 2003–2006, doi: 10.1126/science.1070595 (2002).
Allwood, D. A. et al. Magnetic domain–wall logic. Science 309, 1688–1692 doi: 10.1126/science.1108813 (2005).
Vázquez, M. Magnetic nano- and microwires: design, synthesis, properties and applications (Woodhead Publishing is an imprint of Elsevier, Cambridge, UK, 2015).
Manchon, A. Spin–orbitronics: A new moment for Berry. Nat Phys 10, 340–341, doi: 10.1038/nphys2957 (2014).
Kuschel, T. & Reiss, G. Spin orbitronics: Charges ride the spin wave. Nature Nanotech 10, 22–24, doi: 10.1038/nnano.2014.279 (2015).
Miron, I. M. et al. Current-driven spin torque induced by the Rashba effect in a ferromagnetic metal layer. Nat Mater 9, 230–234, doi: 10.1038/nmat2613 (2010).
Martinez, E., Emori, S. & Beach, G. S. D. Current-driven domain wall motion along high perpendicular anisotropy multilayers: The role of the Rashba field, the spin Hall effect, and the Dzyaloshinskii–Moriya interaction. Appl. Phys. Lett. 103, 072406, doi: 10.1063/1.4818723 (2013).
Khvalkovskiy, A. V. et al. Matching domain-wall configuration and spin-orbit torques for efficient domain-wall motion. Phys. Rev. B 87, 020402, doi: 10.1103/PhysRevB.87.020402 (2013).
Sheka, D. D., Kravchuk, V. P., Yershov, K. V. & Gaididei, Y. Torsion-induced effects in magnetic nanowires. Phys. Rev. B 92, 054417, doi: 10.1103/PhysRevB.92.054417 (2015).
Slastikov, V. V. & Sonnenberg, C. Reduced models for ferromagnetic nanowires. IMA J Appl Math 77, 220–235, doi: 10.1093/imamat/hxr019 (2012).
Yershov, K. V., Kravchuk, V. P., Sheka, D. D. & Gaididei, Y. Curvature-induced domain wall pinning. Phys. Rev. B 92, 104412, doi: 10.1103/PhysRevB.92.104412 (2015).
Dzyaloshinsky, I. A thermodynamic theory of “weak” ferromagnetism of antiferromagnetics. J. Phys. Chem. Solids 4, 241-255, doi: 10.1016/0022-3697(58)90076-3 (1958).
Moriya, T. Anisotropic superexchange interaction and weak ferromagnetism. Phys. Rev. 120, 91–98, doi: 10.1103/PhysRev.120.91 (1960).
Crépieux, A. & Lacroix, C. Dzyaloshinsky-Moriya interactions induced by symmetry breaking at a surface. J. Magn. Magn. Mater. 182, 341–349, doi: 10.1016/S0304-8853(97)01044-5 (1998).
Kravchuk, V. P. Influence of Dzialoshinskii-Moriya interaction on static and dynamic properties of a transverse domain wall. J. Magn. Magn. Mater. 367, 9, doi: 10.1016/j.jmmm.2014.04.073 (2014).
SLaSi spin-lattice simulations package. Kyiv, Ukraine. URL http://slasi.knu.ua.
Fischbacher, T., Franchin, M., Bordignon, G. & Fangohr, H. A systematic approach to multiphysics extensions of finite-element-based micromagnetic simulations: Nmag. IEEE Trans. Magn. 43, 2896–2898, doi: 10.1109/TMAG.2007.893843 (2007).
Obata, K. & Tatara, G. Current-induced domain wall motion in Rashba spin-orbit system. Phys. Rev. B 77, 214429, doi: 10.1103/PhysRevB.77.214429 (2008).
Sinova, J., Valenzuela, S. O., Wunderlich, J., Back, C. H. & Jungwirth, T. Spin hall effects. Rev. Mod. Phys. 87, 1213–1260, doi: 10.1103/RevModPhys.87.1213 (2015).
Qaiumzadeh, A., Duine, R. A. & Titov, M. Spin-orbit torques in two-dimensional Rashba ferromagnets. Phys. Rev. B 92, 014402, doi: 10.1103/PhysRevB.92.014402 (2015).
Manchon, A. & Zhang, S. Theory of spin torque due to spin-orbit coupling. Phys. Rev. B 79, 094422, doi: 10.1103/PhysRevB.79.094422 (2009).
Sobolev, V., Huang, H. & Chen, S. Domain wall dynamics in the presence of an external magnetic field normal to the anisotropy axis. J. Magn. Magn. Mater. 147, 284–298, doi: 10.1016/0304-8853(95)00065-8 (1995).
Bryan, M. T., Schrefl, T., Atkinson, D. & Allwood, D. A. Magnetic domain wall propagation in nanowires under transverse magnetic fields. J. Appl. Phys. 103, 073906, doi: 10.1063/1.2887918 (2008).
Lu, J. & Wang, X. R. Motion of transverse domain walls in thin magnetic nanostripes under transverse magnetic fields. J. Appl. Phys. 107, 083915 doi: 10.1063/1.3386468 (2010).
Goussev, A., Lund, R. G., Robbins, J. M., Slastikov, V. & Sonnenberg, C. Fast domain-wall propagation in uniaxial nanowires with transverse fields. Phys. Rev. B 88, doi: 10.1103/PhysRevB.88.024425 (2013).
Göhler, B. et al. Spin selectivity in electron transmission through self-assembled monolayers of double-stranded DNA. Science 331, 894–897, doi: 10.1126/science.1199339 (2011).
Naaman, R. & Waldeck, D. H. Chiral-induced spin selectivity effect. J. Phys. Chem. Lett. 3, 2178–2187, doi: 10.1021/jz300793y (2012).
Eremko, A. A. & Loktev, V. M. Spin sensitive electron transmission through helical potentials. Phys. Rev. B 88, 165409, doi: 10.1103/PhysRevB.88.165409 (2013).
Grigoriev, S. V. et al. Principal interactions in the magnetic system Fe1−x Co x Si: Magnetic structure and critical temperature by neutron diffraction and SQUID measurements. Phys. Rev. B 76, 092407, doi: 10.1103/PhysRevB.76.092407 (2007).
Yang, H., Thiaville, A., Rohart, S., Fert, A. & Chshiev, M. Anatomy of Dzyaloshinskii–Moriya interaction at Co/Pt interfaces. Phys. Rev. Lett. 115, 267210, doi: 10.1103/PhysRevLett.115.267210 (2015).
Pylypovskyi, O. V., Sheka, D. D., Kravchuk, V. P. & Gaididei, Y. Effects of surface anisotropy on magnetic vortex core. J. Magn. Magn. Mater. 361, 201–205, doi: 10.1016/j.jmmm.2014.02.094 (2014).
Bayreuth University computing cluster. URL http://www.rz.uni-bayreuth.de/ (Date of access:11/02/2016).
High-performance computing cluster of Taras Shevchenko National University of Kyiv. URL http://cluster.univ.kiev.ua/eng/ (Date of access:11/02/2016).
Computing grid-cluster of the Bogolyubov Insitute for Theoretical Physics of NAS of Ukraine. URL http://horst-7.bitp.kiev.ua (Date of access:11/02/2016).
Acknowledgements
O. P. acknowledges a financial support from DAAD (Code No. 91530902-FSK). O. P. and D. S. thank F. G. Mertens for helpful discussions, thank the University of Bayreuth, where part of this work was performed, for kind hospitality. O. P., D. S. and V. Kr. acknowledge the support from the Alexander von Humboldt Foundation. This work is financed in part via the ERC within the EU Seventh Framework Programme (ERC Grant No. 306277) and the EU FET Programme (FET-Open Grant No. 618083).
Author information
Authors and Affiliations
Contributions
O.P. and D.S. formulated the theoretical problem and performed the analytical calculations. O.P. performed spin-lattice simulations. K.Y. performed micromagnetic simulations. O.P., D.S., V.K., K.Y., D.M. and Y.G. contributed to the discussion and writing of the manuscript text.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Pylypovskyi, O., Sheka, D., Kravchuk, V. et al. Rashba Torque Driven Domain Wall Motion in Magnetic Helices. Sci Rep 6, 23316 (2016). https://doi.org/10.1038/srep23316
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep23316
This article is cited by
-
Strain-induced fast domain wall motion in hybrid piezoelectric-magnetostrictive structures with Rashba and nonlinear dissipative effects
Acta Mechanica Sinica (2024)
-
Domain wall dynamics in cubic magnetostrictive materials subject to Rashba effect and nonlinear dissipation
Zeitschrift für angewandte Mathematik und Physik (2023)
-
Electronic materials with nanoscale curved geometries
Nature Electronics (2022)
-
Nonlocal chiral symmetry breaking in curvilinear magnetic shells
Communications Physics (2020)
-
Asymptotic model for twisted bent ferromagnetic wires with electric current
Zeitschrift für angewandte Mathematik und Physik (2019)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
