
Abstract
Nearly eighty years ago, Gray reported that the drag power experienced by a dolphin was larger than the estimated muscle power – this is termed as Gray's paradox. We provide a fluid mechanical perspective of this paradox. The viewpoint that swimmers necessarily spend muscle energy to overcome drag in the direction of swimming needs revision. For example, in undulatory swimming most of the muscle energy is directly expended to generate lateral undulations of the body and the drag power is balanced not by the muscle power but by the thrust power. Depending on drag model utilized, the drag power may be greater than muscle power without being paradoxical.
Similar content being viewed by others


Introduction
The motion of a swimming or a flying animal is determined by the interaction between the fluid and the animal's body. The efficiency of movement is dependent on the energy expended in this fluid-body interaction. One perspective is that a swimming animal expends muscle power to overcome drag. This perspective formed the basis for the analysis on the energetics of dolphin swimming by Gray in 1936, leading to what is known as Gray's paradox1. For a long time, Gray's paradox puzzled researchers studying the energetics and hydrodynamics of dolphin swimming. Although the paradox is now considered to be resolved2,3,4, we revisit Gray's analysis that led to the paradox. The focus of this work, unlike prior art, is not on the energetics of dolphin swimming, rather, it is on questioning the basic premise of Gray's analysis and its generalization to other swimming modes.
Gray's paradox emerged from an attempt by Gray1 to analyze the energetics of two mammalian swimmers. He considered a dolphin and a porpoise swimming at 10.01 m/s and 7.6 m/s, respectively. Assuming a turbulent boundary layer flow over the surface of the swimmer's body, Gray used an empirical relation for drag that was based on a hydrodynamic model for flow over a rigid, flat plate to estimate drag on the swimmer. Muscle power data generated during a period of sustained performance by oarsmen was generalized to mammals and used to estimate the muscle power generated by the dolphin and the porpoise5. From this analysis, it was found that the power required to overcome the estimated drag was almost seven times greater than the power generated from the swimmer's muscles. The imbalance between the power required to overcome drag and the muscle power available to swim became the basis of Gray's paradox.
The approaches to resolve the paradox may be divided into two categories. The first category is based on a hypothesis by Gray, himself. He hypothesized that dolphins may be employing a mechanism to re-laminarize the flow over its body to prevent the flow from becoming turbulent1. Thereafter, much of the work on dolphin hydrodynamics and Gray's paradox focused on a mechanism of re-laminarization for drag reduction so that the power estimates for swimming were low2,4,6,7. The second category focused on identifying potential errors in the data used by Gray. Williams et al.8 and Weihs9 argued that measurements of swimming speed, based on on-board observations of dolphins, swimming from stern to bow, could be erroneous since the swimming speed of the dolphins might have been enhanced by free riding behaviors when swimming close to a ship. In a review on Gray's paradox, Fish3 questioned the estimation of power that uses a muscle model based on the sustained performance of oarsmen. For steady and sustained work, slow oxidative muscle fibres are used to generate power. Cetaceans, which have both fast glycolytic and slow oxidative muscle fibres, may have the ability to use the anaerobic fast glycolytic muscle fibres during burst swimming to generate much higher power than that estimated by Gray3. There has also been work focusing on the calculation of thrust. Recently, Fish and co-workers have shown that in fact, dolphins do produce significant thrust, thus questioning the need to search for drag reducing mechanisms by dolphins4.
In this work we question the basic premise of Gray's paradox on two levels. First, we examine the expectation in Gray's analysis that drag power should be less than muscle power. To that end, we present a power balance equation to understand the cascade of power in swimming animals. Second, we examine the influence of different drag models on the drag power to muscle power ratio. We specifically consider undulatory swimming as an example problem and inquire whether this ratio is greater than or less than unity depending on the drag model used. This inquiry goes to the heart of another longstanding question in aquatic locomotion – can the force on a swimming body be uniquely decomposed into drag and thrust10?
Results
Power budget for swimming
The average power expended by a swimming animal over a swimming cycle is

where σ is the fluid stress acting on the surface of the swimmer's body, n is a unit normal on the surface of the swimmer and points into the swimmer's body and the integration is over the surface A of the swimmer. The overbar implies an average with respect to time. Thus, by definition  is the rate of work done by the swimmer on the fluid.
is the rate of work done by the swimmer on the fluid.
It is important to note the sign convention (see fig. 1). The velocity components are positive when directed in the positive direction of the respective axis. The swimming direction is assumed to be in the positive x-direction. The lateral oscillation velocity of undulation is in the positive and negative y-directions.

The sign convention for forces on the fluid by the swimmer and forces on the swimmer by the fluid.
Velocity components are positive when directed in the positive directions of the respective axis. The velocity component u in the positive x–direction is positive, as shown. The lateral oscillating velocity of undulation v is in the positive and negative y–directions, as shown.
The sign convention for forces needs careful consideration. A positive drag force D imposed by the fluid on the swimmer is directed in the negative x-direction. Conversely, by action-reaction the swimmer imposes a positive force D on the fluid that is directed in the positive x-direction (fig. 1). Similarly, a positive thrust force T imposed by the fluid on the swimmer is directed in the positive x-direction. Conversely, by action-reaction the swimmer imposes a positive force T on the fluid that is directed in the negative x-direction (fig. 1). Finally, a positive net axial force Fx = D − T, imposed by the fluid on the swimmer, is directed in the negative x-direction and by action-reaction the swimmer imposes a force Fx on the fluid which is positive when directed in the positive x-direction (fig. 1).
In Eq. 1, u is the velocity field accounting for both the velocity of body deformations and the swimming velocity. For most undulatory (e.g. eels) and oscillatory (e.g. dolphins) swimmers, the velocity of the body is predominantly in the swimming direction and the direction of lateral body deformations. For the ease of exposition, we present equations with only the axial and lateral velocity components. Let u and v be the axial and lateral velocity components, respectively. Note that the axial component of velocity is the same as the swimming speed. Here, it is assumed that axial deformation kinematics are not significant. Substituting the components of u in Eq. 1 we get11

where Plat is the power expended by the swimmer on the fluid in deforming the swimmer's body in the lateral direction (defined here as the lateral power) and Fx is the axial force from the swimmer on the fluid. Note that  is the mean power expended due to anteroposterior movement (
is the mean power expended due to anteroposterior movement ( ) by the swimmer on the fluid. The swimming speed u can be written as the sum of the mean (
) by the swimmer on the fluid. The swimming speed u can be written as the sum of the mean ( ) and a fluctuation quantity (u′), i.e.,
) and a fluctuation quantity (u′), i.e.,  . Substitution of this yields
. Substitution of this yields

Since there is no net external force on a swimming body,  during steady swimming, where
during steady swimming, where  and
and  are the mean drag and thrust forces, respectively. The drag and thrust on a swimmer depends on how it is defined and in general, there is no unique definition10. This issue will be discussed later.
are the mean drag and thrust forces, respectively. The drag and thrust on a swimmer depends on how it is defined and in general, there is no unique definition10. This issue will be discussed later.  represents the mean power due to the interaction between the fluid and the swimmer's body surface. If there are negligible internal losses, all the power generated by the muscles would be transmitted to the fluid via work done at the surface of the swimmer, i.e.,
represents the mean power due to the interaction between the fluid and the swimmer's body surface. If there are negligible internal losses, all the power generated by the muscles would be transmitted to the fluid via work done at the surface of the swimmer, i.e.,  , where
, where  is the mean muscle power.
is the mean muscle power.
Now we recast the power result in terms of the drag power ( ) and the thrust power (
) and the thrust power ( ). Since
). Since  and
and  , we can recast Eq. 3 as
, we can recast Eq. 3 as

It is clear that  ,
,  ,
,  and
and  are all powers expended by the swimmer on the fluid. Since
are all powers expended by the swimmer on the fluid. Since  is the power expended by the swimmer on the fluid, it follows that
is the power expended by the swimmer on the fluid, it follows that  is the power expended by the fluid on the swimmer. Consequently, the following equation is obtained
is the power expended by the fluid on the swimmer. Consequently, the following equation is obtained

where the left hand side is the total power gained by the swimmer and the right hand side is the total power expended by the swimmer. Eqs. 4 and 5 are two forms of the power budget for swimming.
Eq. 5 shows that a swimmer gains power not only from the muscles ( ), but also gains thrust power from the fluid (
), but also gains thrust power from the fluid ( ). This power is expended by the swimmer on the fluid by way of drag power (
). This power is expended by the swimmer on the fluid by way of drag power ( ), anteroposterior fluctuations (
), anteroposterior fluctuations ( ) and lateral deformations (
) and lateral deformations ( ). In fact, since
). In fact, since  during steady cruising, the thrust power gained by the swimmer is expended entirely as drag power, i.e.,
during steady cruising, the thrust power gained by the swimmer is expended entirely as drag power, i.e.,  . The muscle power is effectively expended in anteroposterior fluctuations and lateral deformations, i.e.,
. The muscle power is effectively expended in anteroposterior fluctuations and lateral deformations, i.e.,  .
.
Equivalently, the cascade of power may be rationalized as follows. The muscle power ( ) is expended directly to deform the body (
) is expended directly to deform the body ( ), which creates thrust power from the fluid on the body (
), which creates thrust power from the fluid on the body ( ). The thrust power gained from the fluid is consequently expended as drag power from the body to the fluid (
). The thrust power gained from the fluid is consequently expended as drag power from the body to the fluid ( ).
).
Application of power budget to swimmers
The power budget will be applied to three representative modes of swimming – undulatory swimming (e.g., anguilliform swimmer like an eel or lamprey), thunniform swimming (e.g., dolphin) and pectoral fin swimming (e.g., sunfish).
Consider an undulatory swimmer (e.g., eel or lamprey) that passes a traveling wave along its body or fin in the anteroposterior direction to generate movement. In this case, the drag and thrust producing regions are intermingled10,12. It is well known that animals swimming at low Reynolds number expend power in producing undulatory kinematics13,14,15. Even at finite Reynolds numbers, swimming animals expend power to produce lateral swimming kinematics11,16,17. In prior work we computed relevant power terms in Eq. 5 for steadily swimming undulatory animals and found that most of the power is expended to generate movement in the lateral direction ( ) and very little or negligible net power is expended to move in the anteroposterior direction, i.e.,
) and very little or negligible net power is expended to move in the anteroposterior direction, i.e.,  was found to be negligible (Eq. 5)11,17. The power expended to move in the dorsoventral direction was also negligible because typically there are no body undulations or movements in that direction11,17. Thus, the power balance equation (Eq. 5) reduces to
was found to be negligible (Eq. 5)11,17. The power expended to move in the dorsoventral direction was also negligible because typically there are no body undulations or movements in that direction11,17. Thus, the power balance equation (Eq. 5) reduces to  . Furthermore,
. Furthermore,  and
and  during steady undulatory swimming (fig. 2). This was found to be the case for low as well as high Reynolds numbers11.
during steady undulatory swimming (fig. 2). This was found to be the case for low as well as high Reynolds numbers11.

Energy budget in undulatory swimming.
An undulatory swimming animal uses its muscle power ( ) to do work on the fluid (
) to do work on the fluid ( ). Most of this power expended on the fluid is due to lateral undulations (
). Most of this power expended on the fluid is due to lateral undulations ( ). The power expended on the fluid is primarily concentrated in the wake (
). The power expended on the fluid is primarily concentrated in the wake ( ). Finally, all the power expended on the fluid is dissipated (viscous) entirely into the fluid during steady swimming.
). Finally, all the power expended on the fluid is dissipated (viscous) entirely into the fluid during steady swimming.
Thunniform swimming (e.g., dolphin) is considered an extreme type of undulatory swimming where most of the undulations are by the flukes (hydrofoil) at the posterior end of the body. The body causes drag whereas the oscillating flukes produce thrust. The drag and thrust producing regions are separate with negligible intermingling. The flukes oscillate laterally to create lift forces which are directed in the forward direction to obtain thrust4. Prior data from carangiform swimmers16 and analysis based on lift theory implies that here too the muscle power is be expended primarily to move the flukes laterally ( ). The thrust power (
). The thrust power ( ) is produced at the flukes and the drag power (
) is produced at the flukes and the drag power ( ) is expended on the body4. Due to small axial velocity fluctuations,
) is expended on the body4. Due to small axial velocity fluctuations,  is expected to be negligible compared to the lateral power expended at the flukes16 leading to the following power balance:
is expected to be negligible compared to the lateral power expended at the flukes16 leading to the following power balance:  , where
, where  and
and  during steady swimming.
during steady swimming.
In case of swimming caused by pectoral fins (e.g., sunfish), the muscle power is expended in moving the pectoral fins primarily in the anteroposterior direction18. Thus, in this case the power balance is:  , where
, where  and
and  during steady swimming.
during steady swimming.
Should drag power be necessarily less than muscle power
Consider the question whether drag power should be less than muscle power, i.e., should  ? In general, since muscle power is not directly expended as drag power, as noted earlier an equivalent question to pose is whether thrust power should be less than the power to deform the body, i.e., should
? In general, since muscle power is not directly expended as drag power, as noted earlier an equivalent question to pose is whether thrust power should be less than the power to deform the body, i.e., should  ? The latter question is preferred because it is the power expended in deformations that produces thrust power. The answer to this question would depend on how drag and thrust are modeled as is explained below.
? The latter question is preferred because it is the power expended in deformations that produces thrust power. The answer to this question would depend on how drag and thrust are modeled as is explained below.
Consider scenarios where the drag and thrust regions are physically separated on a swimmer's body. For example, the flukes of a dolphin are thrust producers while the body causes drag. By this definition of drag and thrust, the contribution to  in Eq. 5 is from the body region whereas the contribution to
in Eq. 5 is from the body region whereas the contribution to  and
and  is from the flukes4. It can be argued that the thrust power (
is from the flukes4. It can be argued that the thrust power ( ) gained back by the caudal fin from the fluid cannot be greater that the rate of work done by the fin on the fluid (
) gained back by the caudal fin from the fluid cannot be greater that the rate of work done by the fin on the fluid ( ) since there is no power source in the fluid. Hence, by this definition of drag and thrust,
) since there is no power source in the fluid. Hence, by this definition of drag and thrust,  , i.e.,
, i.e.,  .
.
In case of undulatory swimmers where the drag and thrust producing regions are not distinct, the analysis above may not be reasonable. As noted before, there is no clear consensus on how drag and thrust should be defined for undulatory swimmers since the drag and thrust producing regions are intermingled10,12. Hence, there are different ways of modeling drag. One approach is based on adding forward forces from different parts of a swimmer's body and calling it thrust. Similarly backward forces give drag12,16. Another approach is to consider the total force on the body with respect to time. The instances when the net force is forward can be termed thrust and the negative portions of the cycle can be termed drag12,16. Yet, another possibility is to decompose the swimming kinematics into two parts and defining one as the drag mode and another as the thrust mode11. Each of these definitions will lead to different models for drag and thrust. The utility of such models is that equating drag and thrust models can lead to reduced–order equations to obtain the swimming velocity of the animal11. However, the models could be such that  . An example of such a scenario will discussed in the next two subsections. This does not violate any energy principle since the corresponding drag and thrust forces are concurrently present on the swimmers body10,11,12. Hence, the resultant force is never too large on any part of the body. Consequently, the actual power at any point on the body never exceeds the muscle power locally.
. An example of such a scenario will discussed in the next two subsections. This does not violate any energy principle since the corresponding drag and thrust forces are concurrently present on the swimmers body10,11,12. Hence, the resultant force is never too large on any part of the body. Consequently, the actual power at any point on the body never exceeds the muscle power locally.
The primary issue in generalizing the argument underlying Gray's paradox2,3 is now apparent. In general, it is expected that the drag power would be lower than the muscle power. While this would be true for certain drag and thrust models, like those where drag and thrust producing regions are physically separated, this would not be true in general for every functional drag and thrust model. If drag power is to be considered as the “useful” part of the output power, then it should be noted that the total power input to the swimmer is  (Eq. 5). The implication in Gray's analysis that the muscle power is the only source of power gained by a swimmer needs to be revised.
(Eq. 5). The implication in Gray's analysis that the muscle power is the only source of power gained by a swimmer needs to be revised.
Instead of comparing the drag power to the muscle power ( ), if one compares drag power to the total power gained by a swimmer (
), if one compares drag power to the total power gained by a swimmer ( ), then there would be no paradox no matter what definition of drag is used. Since drag is always equal to thrust (
), then there would be no paradox no matter what definition of drag is used. Since drag is always equal to thrust ( ) during steady cruising,
) during steady cruising,  is always less than one.
is always less than one.
Calculation of drag power
In the next subsection we demonstrate the effect of different drag models on the drag power to muscle power ratio. To do so, one particular case is sufficient. To that end we consider an example of undulatory swimming of larval zebrafish. This does not imply that our conclusions are specific to only low Re swimming like that of larval zebrafish. We choose undulatory swimming because there is no unique way of defining drag and thrust on an undulatory swimmer10,12,19.
We consider three different drag models. We use data from numerical simulation of live larval zebrafish kinematics and an empirical estimate of drag for the three drag models. Numerical simulations of steady free-swimming larval zebrafish were carried out to compute the hydrodynamic forces on the zebrafish during steady swimming. The numerical simulation tool computes the swimming speed and forces of fluid-fish interaction using experimentally extracted zebrafish swimming kinematics as input. The three dimensional flow field around the swimming body is fully resolved in these simulations20. As the experimental kinematics were unsteady in nature, kinematics of one cycle of fish's body undulations were extracted from the experimental kinematics and repeated over time to get steady kinematics. These steady kinematics were used to carry out steady swimming simulations. We used experimental data for the kinematics of larval zebrafish provided by Melina Hale (University of Chicago). The larval zebrafish was 3.9 mm long and the body undulation frequency was 33.3 Hz. The computed mean swimming speed was found to be approximately 1 cm/s, which was in agreement with experimental data. Details of the numerical simulation tool, the zebrafish kinematics and validation of the zebrafish simulations can be found in our prior work11,20.
In the first drag model, we estimate the drag using instantaneous axial force, computed from the simulation data, on the swimmer. The axial force has cyclic variations about zero over a swimming cycle (fig. 3). These variations, about zero, can be interpreted as thrust and drag (fig. 3). This model results in a drag power of about 0.173 erg/s. During steady swimming, we computed that the larval zebrafish expends about 1.67 erg/s in the fluid11.

The axial force in the swimming direction ( = −Fx) on a larval zebrafish during steady swimming.
The force oscillates about a zero mean. Positive values may be interpreted as thrust and negative as drag. Drag and thrust according to this definition can be used to compute the drag power and the thrust power during steady swimming.
For the second drag model, we use an empirical model to estimate the drag on a zebrafish similar to the approach used by Gray1. Gray assumed that the drag on a swimmer is equal to the towing resistance of a rigid body of the same size and shape1. Hence, to estimate the drag we replace the zebrafish by a flat plate of same surface area and aspect ratio and move it in stationary water at the wave speed of the zebrafish's body undulations (10.3 cm/s). The drag power, for this setup, based on an empirical drag model is found to be approximately 2.84 erg/s, which is an order of magnitude larger than the drag from the first model.
Finally, we calculated drag according a third model proposed by us where we have shown that drag and thrust may be separated in a meaningful way for undulatory swimmers (by separating the drag and thrust producing kinematics)19. The drag power based on this model was found to be about 5.28 erg/s.
Influence of drag models on the ratio of drag power to muscle power
Here we see how different drag models can lead to different values of the ratio of drag power to muscle power. Power calculations according to three drag models for larval zebrafish were presented above. According to the first drag model, we get  . For the second drag model, we obtain
. For the second drag model, we obtain  . Finally, according to the third model,
. Finally, according to the third model,  . The results based on second and third drag models should be regarded paradoxical according to Gray's analysis. However, this is no paradox. The results turn out this way simply because of the particular drag model being used. No energy conservation principles were violated as discussed in the previous subsection.
. The results based on second and third drag models should be regarded paradoxical according to Gray's analysis. However, this is no paradox. The results turn out this way simply because of the particular drag model being used. No energy conservation principles were violated as discussed in the previous subsection.
Discussion
A related issue is the efficiency of swimming which is commonly quantified by the Froude efficiency21. It is defined as  , where
, where  is the mean power in the wake of the swimmer. In undulatory swimming, all the power due to lateral undulations is dissipated in the fluid, most of which is in the wake of the swimmer (fig. 2). Hence,
is the mean power in the wake of the swimmer. In undulatory swimming, all the power due to lateral undulations is dissipated in the fluid, most of which is in the wake of the swimmer (fig. 2). Hence,  . The Froude efficiency is meaningful in the context of Eq. 5. On the other hand, in the context of the power balance given by
. The Froude efficiency is meaningful in the context of Eq. 5. On the other hand, in the context of the power balance given by  , which has no term corresponding to the so-called “useful” drag power, the Froude efficiency is zero10. Another drawback of using Froude efficiency is the ambiguity in the definition of drag and thrust as discussed above10,19. For example, according to drag models one, two and three discussed earlier, the Froude efficiency is ηF = 0.09, 0.63 and 0.76, respectively.
, which has no term corresponding to the so-called “useful” drag power, the Froude efficiency is zero10. Another drawback of using Froude efficiency is the ambiguity in the definition of drag and thrust as discussed above10,19. For example, according to drag models one, two and three discussed earlier, the Froude efficiency is ηF = 0.09, 0.63 and 0.76, respectively.
To summarize, we provide a fundamental fluid mechanical perspective to view Gray's paradox. We note that the muscle energy is predominantly dissipated to cause the deformation kinematics of the body. The drag power is balanced not by the muscle power but by the thrust power. Drag power can be greater than muscle power, depending on how it is defined, without being paradoxical.
References
Gray, J. Studies in animal locomotion. IV. the propulsive powers of the dolphin. J. Exp. Biol. 13, 192–199 (1936).
Fish, F. E. & Lauder, G. V. Passive and active flow control by swimming fishes and mammals. Annu. Rev. Fluid Mech. 38, 193–224 (2006).
Fish, F. E. The myth and reality of gray's paradox: implication of dolphin drag reduction for technology. Bioinspir. Biomim. 1, R17–R25 (2006).
Fish, F. E., Legac, P., Williams, T. M. & Wei, T. Measurement of hydrodynamic force generation by swimming dolphins using bubble dpiv. J. Exp. Biol. 217, 252–260 (2014).
Henderson, Y. & Haggard, H. W. The maximum of human power and its fuel: From observations on the yale university crew, winner of the olympic championship, paris, 1924. Am. J. Physiol. 72, 264–282 (1925).
Fish, F. E. & Rohr, J. Review of dolphin hydrodynamics and swimming performance. Tech. Rep., SPAWARS, San Diego, CA (1999).
Webb, P. W. Hydrodynamics and energetics of fish propulsion. Bull. Fish. Res. Board Can. 190, 1–159 (1975).
Williams, T. M. et al. Travel at low energetic cost by swimming and wave-riding bottlenose dolphins. Nature 335, 821–823 (1992).
Weihs, D. The hydrodynamics of dolphin drafting. J. Biol. 3, 8.1–8.16 (2004).
Schultz, W. W. & Webb, P. W. Power requirements of swimming: do new methods resolve old questions? Integr. Comp. Biol. 42, 1018–1025 (2002).
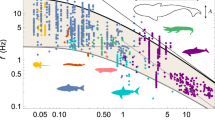
Bale, R., Hao, M., Bhalla, A. P. S. & Patankar, N. A. Energy efficiency and allometry of movement of swimming and flying animals. P. Natl. Acad. Sci. 111, 7517–7521 (2014).
Tytell, E. D. & Lauder, G. V. The hydrodynamics of eel swimming: I. Wake structure. J. Exp. Biol. 207, 1825–1841 (2004).
Lauga, E. Floppy swimming: Viscous locomotion of actuated elastica. Phys. Rev. E 75, 041916 (2007).
Lauga, E. & Powers, T. R. The hydrodynamics of swimming microorganisms. Rep. Prog. Phys. 72, 096601 (2009).
Purcell, E. M. The efficiency of propulsion by a rotating flagellum. P. Natl. Acad. Sci. 94, 11307–11311 (1997).
Borazjani, I. & Sotiropoulos, F. On the role of form and kinematics on the hydrodynamics of self-propelled body/caudal fin swimming. J. Exp. Biol. 213, 89–107 (2010).
Bhalla, A. P. S., Griffith, B. E. & Patankar, N. A. A forced damped oscillation framework for undulatory swimming provides new insights into how propulsion arises in active and passive swimming. PLoS Comput. Biol. 9, e1003097 (2013).
Mittal, R., Dong, H., Bozkurttas, M., Lauder, G. V. & Madden, P. Locomotion with flexible propulsors: II. Computational modeling of pectoral fin swimming in sunfish. Bioinspir. and Biomim. 1, S35–S41 (2006).
Bale, R. et al. Separability of drag and thrust in undulatory animals and machines. arXiv:1402.1544 (2014).
Bhalla, A. P. S., Bale, R., Griffith, B. E. & Patankar, N. A. A unified mathematical framework and an adaptive numerical method for fluid-structure interaction with rigid, deforming and elastic bodies. J. Comput. Phys. 250, 446–476 (2013).
Lighthill, M. J. Note on the swimming of slender fish. J. Fluid Mech. 9, 305–317 (1960).
Acknowledgements
This work was supported by NSF grants CBET-0828749, CMMI-0941674, CBET-1066575 and DGE-0903637. Computational resources were provided by NSF's TeraGrid Project grants CTS-070056T and CTS-090006 and by Northwestern University High Performance Computing System – Quest.
Author information
Authors and Affiliations
Contributions
N.A.P. and R.B. conceived research and designed simulations. R.B.,M.H., A.P.S.B. and N.P. carried out simulations. R.B. and N.A.P. did analysis, theoretical work and interpretation of simulations results. N.A.P. and R.B. wrote and edited the manuscript.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Rights and permissions
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. The images or other third party material in this article are included in the article's Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder in order to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/4.0/
About this article

Cite this article
Bale, R., Hao, M., Bhalla, A. et al. Gray's paradox: A fluid mechanical perspective. Sci Rep 4, 5904 (2014). https://doi.org/10.1038/srep05904
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep05904
This article is cited by
-
Long-distance sinusoidal actuation in self-propelling apparatus: a novel spiral spring-based crank rocker mechanism
Sādhanā (2024)
-
The performance of a flapping foil for a self-propelled fishlike body
Scientific Reports (2021)
-
Self-propulsion of flapping bodies in viscous fluids: Recent advances and perspectives
Acta Mechanica Sinica (2016)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
