
Abstract
Measuring the in-plane mechanical stress in a taut membrane is challenging, especially if its material parameters are unknown or altered by the stress. Yet being able to measure the stress is of fundamental interest to basic research and practical applications that use soft membranes, from engineering to tissues. Here, we present a robust non-destructive technique to measure directly in-situ stress and strain in soft thin films without the need to calibrate material parameters. Our method relies on measuring the speed of elastic waves propagating in the film. Using optical coherence tomography, we verify our method experimentally for a stretched rubber membrane, a piece of cling film (about 10 μm thick), and the leather skin of a traditional Irish frame drum. We find that our stress predictions are highly accurate and anticipate that our technique could be useful in applications ranging from soft matter devices to biomaterial engineering and medical diagnosis.
Similar content being viewed by others


Introduction
Soft thin films hanging in the air or confined in fluids are found ubiquitously in our daily lives as well as in natural and engineering systems. Examples include cling film packaging food, the eardrum and the diaphragm in our body, and various elastic sheets, membranes, vesicles and bands holding structures together. They are typically under external and/or internal stress, and it is often desirable to know the stress level to understand the environment they are exposed to or interacting with, or to monitor the health of, and changes in, the materials. In general it is challenging to measure non-invasively the stress field in such materials in situ. This is even more difficult if the mechanical properties of the material are unknown and, furthermore, if the original configuration of the material is unknown, which precludes straightforward measurement of strain1,2.
Various techniques have been devised to measure in-plane stresses3. The choice of technique depends on the material type (solid/liquid/type of molecules) and also on the length scale. Essentially all techniques so far rely on the knowledge of the elastic moduli of the material or some specific expected behaviour of the material, which limits application to known or specific materials and structures. For example, in the Langmuir–Blodgett trough4, a workhorse of membrane biophysics, surface tension is estimated by measuring the amount of force required to insert a Wilhelmy plate into a given membrane. Yet, this force depends on the nature of the surface tension and its accuracy has been questioned for solid-like membranes5. Conventional ultrasound methods also require the knowledge of the elastic moduli and acousto-elastic parameters of the materials6.
In this paper, we describe a technique that allows the stress field to be determined in soft thin films even without a priori knowledge of the material properties or applied strain. The technique uses elastic waves propagating in the film7,8 followed by a simple algorithm to determine the stress from their measured wave speeds. Wave speeds change with stress, just like the sound of a guitar changes when strings are tightened. From the measured wave speeds at several frequencies we show how to recover the in-plane stress and strain in stretched rubber membrane, cling film, and animal skin directly, without knowing nor needing any physical parameters other than mass density and current thickness. For ultra-thin sheets such as cling film, the current thickness is hard to measure accurately, but we show that it is not needed for the estimation of the stress. Here, we use optical coherence tomography (OCT) to visualise the elastic waves and measure their speeds in an audible frequency range. This range (1–20 kHz) is well suited for soft materials with thickness ranging from sub-micron to a few hundreds of micrometers.
Results
Figure 1 summarises the main findings. Fig. 1c–e show the wavefronts generated by a vibrating spherical probe hitting a thin rubber membrane (Fig. 1a, b) with frequency f = 6 kHz, as recorded by OCT imaging in the unstressed (N = 0) and fully stressed states (N = 6 weights of 20 g each added to pull on the sheet, creating a stress of σ1 = 200 kPa, see Methods). While in the unstressed state the wave propagates at the same speed in all directions (circular wavefronts), the application of stress clearly induces anisotropy for the wave speed (elliptical wavefronts with the major axis aligned with x1, i.e., the direction of the uniaxial tension), leading to a significant increase of the speed along the uniaxial tension, and a decrease along the perpendicular direction (see Supplementary Note 8). This observation is confirmed when solving the dispersion relation (see Methods) of the A0 fundamental antisymmetric propagation mode for different levels of stress (N = 0, …6) as shown in Fig. 1f. From our experimentally measured phase wave speeds we then deduce by linear least squares regressions the values of α and γ, the two quantities required to determine stress and strain (see Methods and Supplementary Note 7).

a Photograph of our rubber sheet. b Optical Coherence Tomography (OCT) cross-sectional image. c, d Wave profiles measured by OCT when the film is c stress-free and d subject to uniaxial stress σ1 ≃ 200 kPa, see Supplementary Movies 1 and 2. The wavefronts become elliptical when stretched. e Corresponding 3D wavefronts, obtained by measuring the vertical displacement from the phase change in the interference signal of the OCT; N indicates the number of weights (each with mass 20 g). f Dispersion relations of the A0 mode obtained at different levels of stress. Each curve is an average over six measurements (for clarity the error bar is not shown here but can be found in Supplementary Fig. 11). g Comparison between measured and applied stress values (σ1, σ2: stress components along, and perpendicular to, the direction of tension, respectively). For reference, the dashed lines show where the measured stresses are equal to the applied stresses. h Comparison between the measured and applied stretch values (λ1, λ2: stretch ratios along, and perpendicular to, the direction of tension, respectively). Dashed lines, expected 1 and -1/2 power laws of the stretches for reference. i Stress-strain curve from the measured data compared to that measured by a standard tensile test. Error bars are the standard deviations from six measurements.
Figure 1g shows the resulting Cauchy stress (i.e., σ1 = α − γ) and how it compares with that actually applied to the film, with errors around 5%. Similarly, we measure σ2 using the wave speeds along x2, also shown in Fig. 1g. As the uniaxial tension is applied along x1 only, σ2 is expected to be close to zero, which is what the experiments confirm.
According to our analysis (Eq. 2 in Methods), the extension stretch is λ1 = (α/γ)1/3 in uni-axial deformation. Figure 1h shows the identified stretch ratio (i.e., (α/γ)1/3, as computed from the speed measurements) and the comparison with the experimental λ1. We measured the latter directly by tracking the deformation of a grid drawn on the membrane, and we also computed it from the thickness variation as \({\lambda }_{1}={({h}_{0}/h)}^{2}\). Again an excellent agreement is achieved, with a maximum error of ~3%. Similarly, we applied the method along the x2 axis to obtain λ2; in the uni-axial tension of an incompressible, initially isotropic solid, it is expected to behave as \({\lambda }_{1}^{-1/2}\), as we indeed verified.
Finally, Fig. 1i shows the agreement between the stress found from the speed measurements as a function of the identified stretch with the data obtained by an independent (destructive) tensile test and thus validates further the proposed method.
Next we measured the stress in stretched plastic wrap, a.k.a. cling film (Fig. 2a) made of polyethylene. The typical thickness of cling film ranges from 8 to 13 μm, which is beyond the capabilities of accurate axial resolution in OCT. Nonetheless, we can still generate and study Lamb wave propagation in the stretched cling film with the OCT system. Here, we were able to evaluate the stress in the cling film (but not the strain): we proved (see Methods) that σ1 = α − γ = ρv2 for ultra-thin stretched films, almost independently of frequency. Figure 2b shows the data of wave dispersion for the unstressed and fully stressed states, obtained with a similar set-up. In Fig. 2c, we report the stress identified by this method, which shows very good agreement with the values of the stress actually applied (maximum error ~ 11%).

a Photograph of the cling film. Scale bar, 10 cm. b Dispersion curves for a cling film, in the stress-free (lower) and stressed (upper) states. Markers, experiment. Curves, theory. Inset, Optical Coherence Tomography (OCT) transverse image of the cling film, which is too thin for an accurate thickness measurement by OCT. Scale bar, 0.5 mm. c Comparison between the applied and identified stress. Dashed line, 45∘ line for reference. Error bars are the standard deviations from five measurements.
Finally we applied our technique to measure the stress in the drumhead of a musical instrument called the bodhrán drum, a traditional Irish drum made with goat skin. The thickness of the skin was measured to be 360 ± 30 μm. We performed in situ measurements on the drumhead (Fig. 3a) at normal (dry) and hydrated conditions of the skin. In the dry condition, the fundamental resonance frequency of the instrument was ~84 Hz, and it was decreased to ~36 Hz after hydration (see Supplementary Note 10). The goat skin is intrinsically anisotropic, but our experiments revealed almost circular wave profiles (Supplementary Movies 3 and 4). This is well explained by the large radial stress in the drum, which stretches collagen fibres along the stress field9. The applied strain is transversely isotropic (equi-biaxial in the radial/circumferential directions) and thus, for all intends and purposes, acoustic wave propagation is isotropic in the drum plane. Figure 3b shows the dispersion relations of the skin in the dry and damp states, obtained at a region in the drum head. We determined from the experimental data that the amount of radial stretch in the dry skin is 0.28% and that humidification relaxed it to 0.20% (Fig. 3c). The corresponding stress is changed from 3.79 MPa (dry) to 1.31 MPa (damp). Noting that the strain is small, with the stress and strain we can derive the Young modulus of the skin to be ~680 MPa for dry skin and ~330 MPa for the damp skin, which shows that humidification not only decreases significantly the stretch but also the stiffness of the skin.

a Photograph of the experimental set up. A real-time Optical Coherence Tomography image is displayed in the monitor. b Dispersion relations measured in the dry (upper) and damp (lower) states. Markers, experiment. Dashed curves, theory. c Stresses and strains measured in the dry and damp states. Error bars are the standard deviations over five measurements.
The result reveals how much the humidification changed the stiffness and the tension of the skin. Hydration alters the resonance frequency (pitch) of the instrument, which is proportional to \(\sqrt{{\sigma }_{1}/\rho }\). The 65% reduction in tension predicts about 46% decrease in resonance frequency. This is comparable to the measured 57% decrease for the resonance frequency (from 84 Hz to 36 Hz). The discrepancy is mostly likely due to a change in the mass density as well as to the spatially nonuniform hydration applied across the large drumhead (41 cm diameter).
Discussion
We proposed a method to evaluate directly the in-plane stress and strain present in a taut film or membrane. The method is nearly model-free, in the sense that it is independent of, and does not require, the material’s elastic constants. The method only required the mass density and film thickness.
We validated our method experimentally and found a high level of accuracy for the measured stress and strain in a thin rubber film (0.5 mm thickness). We went on to apply the same method to an ultra-thin membrane of stretched cling film (12 μm thickness). In that case we were able to determine the stress accurately, even though theoretically, our method was designed for incompressible materials. Cling film is compressible, with initial Poisson’s ratio ν ≃ 0.32 and also exhibits significant plasticity. In Supplementary Note 3, we show that extending the method to accommodate compressibility only adds a small error in the low frequency regime, which helps explain the success of the method here. We also managed to estimate the in situ, unknown, amounts of stress and stretch in the skin of a bodhrán, and found that humidifying it decreased the stretch by almost 30% and the stress by 65%. In that analysis we did not consider whether the mass density was changed by humidification, so that our results are approximate.
Our method applies primarily to elastic materials, and also to weakly viscoelastic materials because there is evidence that viscosity does not affect the wave speeds significantly, only their amplitude, provided the attenuation length is much larger than the wavelength10. Furthermore, for thin plates, only low frequency waves are needed to estimate the stress, in which case viscosity has a very small effect on the wave speed. However, larger frequencies, or highly viscous materials, call for more involved modelling with parameters including viscosity11,12.
Many real-life materials such as composites or biomaterials possess intrinsic anisotropy. Accounting for preferred directions complicates the equations of acousto-elasticity greatly, and leads to a breakdown of the proposed method, except maybe in special cases, such as for example for waves propagating along fibers when they are aligned with the principal directions of pre-stretch, see the recent advances in that direction13,14.
It is relatively straightforward to extend our method to thin structures in contact with fluids or (isotropic) gel-like matters, either on one or both sides, such as the dura mater enveloping the brain (after craniotomy)15 and the cornea16 as well as blood vessel walls17. Our work is expected to pave the way to practical applications.
Methods
Theory
Consider a stretched film with the coordinate axes (x1, x2, x3) aligned with its edges, where − h ≤ x3 ≤ h, so that the film has thickness 2h, see Fig. 4a. To determine the stress, we consider the speed of elastic waves travelling along the x1 direction of a free film, with no displacement in the x2 direction, and polarised in the (x1, x3) plane. These are the so-called Lamb waves.

a A thin plate with thickness 2h put under tensile stress σ1 along x1. b Modal shapes of the fundamental anti-symmetric (A0) and symmetric (S0) Lamb waves, with color-coded vertical displacement Δz. c Dispersion curves (kh Vs v where k is the wavenumber and v is the wave speed) for the A0 and S0 modes in a hypothetical incompressible material with initial shear modulus μ = 1.0 kPa, Landau third-order modulus A = − 6.4 kPa and mass density ρ = 1.0 g/cm3, subject to a uni-axial extension of 5% (stretch λ1 = 1.05, full lines) and then 10% (λ1 = 1.10, dashed lines). The circles indicate three asymptotic values of the dispersion curves, and arrows indicate their direction of change with tension (α and γ are instantaneous elastic moduli, η0 = 0.2956). d Master curves for the dispersion relation of all materials and pre-stresses/stretches (independent of ρ, μ, A, σ1, λ1): identifying two values of η, the dimensionless variable on the vertical axis, from measurements gives access to the stress and the strain.
The dispersion relation, relating the wave speed v to the wavenumber k, for the anti-symmetric (flexural, exponent + 1) and symmetric (extensional, exponent − 1) modes is18
where α and γ are instantaneous elastic moduli. Determining them gives direct access to the state of in-plane stress and strain, because
see Supplementary Note 1 for details.
This dispersion equation assumes the membrane is incompressible, isotropic when there is no stress, and is subjected to moderate strains. These assumptions are an excellent approximation for most rubber-like materials and lead to the third-order incompressible elastic strain energy19, which depend on only two material constants: the initial shear modulus μ (μ = E/3, where E is the Young modulus), and the third-order Landau constant A (also known as n in the expansion of Murnaghan20,21).
The dispersion relation Eq. 1 yields multiple solutions for the speed v at a given frequency (or wavenumber k). The waves with the smallest speeds, called the fundamental modes A0 and S0, are the easiest to measure. The principle of our method is to extract the moduli α and γ from the A0 and S0 modes, as we detail below, and determine the stress and stretch using Eq. 2. Figure 4b shows how these modes are sensitive to stress from a uni-axial extension of 5% (full lines) to 10% (dashed lines), for a specific choice of (ρ, μ, A).
For a very thin film, or small k, we can take kh → 0 in Eq. 1 to obtain ρv2 = α − γ or α + 3γ for the A0 or S0 modes, respectively. On the other hand, for a very thick film, or large k, we can take kh → ∞ to obtain \(\rho {v}^{2}=\alpha -{\eta }_{0}^{2}\gamma\) where η0 = 0.2956 is the real root of the cubic x3 + x2 + 3x − 1 = 0 (Rayleigh surface wave limit). In principle, if two of these three limiting wave speeds can be measured, then α and γ, and thus the stress and stretch can be determined through Eq. 2. In fact, the first limit gives the stress directly according to Eq. 2 (later we show how this remark leads to an accurate stress measurement in an ultra-thin film such as cling film.).
In practice, it might prove difficult to attain reliable values for these limits in general, especially the third one (as a thin film is the opposite of a half-space, where a Rayleigh wave propagates). It is also impractical to use templates such as Fig. 4a for other values of the speeds, because the graphs are very sensitive22 to the {μ, A, λ1} values (hence two very different sets could yield very close plots).
Instead, we rely on a master graph, independent of the material and physical parameters ρ, μ, A, σ1, λ1. For the A0 mode we define \({\eta }_{A0}=\sqrt{(\alpha -\rho {v}^{2})/\gamma }\), and the corresponding dispersion equation is
For the S0 mode, we define \({\eta }_{S0}=\sqrt{(\rho {v}^{2}-\alpha )/\gamma }\) and get
see Fig. 4c for the resulting η − kh master curves (and Supplementary Note 1). Then we obtain α and γ from these master curves by placing two points on the curves from speed/frequency measurements, which leads to a system of two equations. In practice, we may increase the accuracy by making more than two measurements and optimising for α, γ by linear least squares regression (Supplementary Note 7).
For ultra-thin films such as cling film (less than 13 μm thick), the OCT system is not able to measure the thickness accurately, but it can image waves and measure their speed. Take for example the 2 kHz measurement for the stressed cling film, see Fig. 2b: there, v ≃ 32 m.s−1 and 2h < 13 μm, which means that kh < 2.73 × 10−3. Thus, solving Eq. 3 we find that \(0.99995 < {\eta }_{A0}^{2} < 1.0\), so that for all intents and purposes, \({\eta }_{A0}^{2}=(\alpha -\rho {v}^{2})/\gamma =1\). It follows that at that frequency, the stress σ1 = α − γ is found directly as σ1 = ρv2.
Experimental setup
We devised the experimental setup shown in Fig. 5a and Supplementary Fig. 10, based on a home-built, swept-source optical coherence tomography (OCT) system16. This system has an A-line rate of 43.2 kHz, axial resolution of ~15 μm and transverse resolution of ~30 μm, using a polygon swept laser with a tuning range of 80 nm and a center wavelength of 1280 nm. The optical beam is scanned using a two-axis galvanometer scanner. To excite Lamb waves in the film we used a probe driven by a vibrating piezoelectric transducer (Thorlabs, PA4CEW). The plastic probe was 3D-printed and has a spherical tip with a 2 mm diameter. A small force (~20 mN) was applied to the probe to keep it in contact with the sample. The optical beam scan was synchronised with the probe vibration to operate in an motion-brightness (M-B) scan mode, to capture the wave propagating along the direction of tension (x1), and then along x2. The frequency of the vibration was step-tuned from 2 to 20 kHz with an interval of 2 kHz. At each frequency, we acquired the amplitudes and phases of the vibrations at 96 transverse locations (see Supplementary Note 4 for details of the M-B scan). To demonstrate the stress-induced anisotropy visually, we also scanned the laser beam along the out-of-plane direction (x3) to obtain a top view of the wave propagation within the film, see Fig. 1c, d. The vertical displacement near the probe contact point at the sample was in the order of 100 nm in the frequency range. To measure this small vibration, we used the phase change in the interference signal of the OCT16, see Fig. 1e.

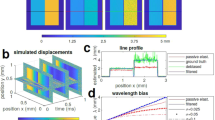
a Schematic of the experimental setup. The OCT operates synchronously with the piezoelectric transducer (PZT) probe to perform an motion-brightness (M-B) scan. Inset, OCT transverse image of the film (scale bar, 2 mm). b Real and imaginary parts of the displacement field when the stimulus frequency is 4 kHz. The curves show the displacements extracted from the upper surface of the sample. c, Wavenumber domain data obtained by Fourier transform of the spatial domain data. A peak corresponding to the A0 mode can be clearly identified from this curve. d, e Spatial and wavenumber domain data obtained at 12 kHz. Two peaks, corresponding to the A0 and S0 modes, can be identified from the wavenumber domain data.
Figure 5b, d shows the real and imaginary parts of the vertical displacements obtained at 4 kHz and 12 kHz, respectively, when two weights are used to load the rubber membrane. The curve above each map shows the displacement extracted from the upper surface of the membrane.
To measure the wavenumber k, and thus the wave speed v = 2πf/k for a given frequency, the surface displacement was Fourier-transformed from the spatial domain to the wavenumber domain, as shown in Fig. 5c, e. The standard deviation error in the wavenumber measurement is estimated to be about 0.1% (see Supplementary Note 5). At 4 kHz, the A0 mode is predominantly excited so that only one peak can be identified in the wavenumber domain. At 12 kHz, another peak that corresponds to the S0 mode emerges at a lower wavenumber besides the A0 mode (see also Supplementary Note 6). The wavenumbers of the A0 mode obtained from Fig. 5c, e are 2.43, 5.46rad.mm−1, respectively. Taking the film thickness and the wavenumbers together, we get 2kh ≃ 1.14 at 4 kHz and 2kh ≃2.56 at 12 kHz, showing that these measurements are taken in the low frequency regime. Our sensitivity analysis (see Supplementary Note 2) suggests that measurements in the low frequency regime give a better detection sensitivity for the mechanical stress. We used the data of A0 for the subsequent analysis since it is the dominant mode in the frequency range studied here.
For the experiments on the rubber sheet and cling film, the sample was clamped along its two short edges and one clamp was pulled horizontally by a cord connected to N = 1 to 6 weights (m = 20 g each) to apply a uniaxial tension σ1 with increasing magnitude, as shown in Fig. 5a. It was measured as σ1 = λ1Nmg/(2W0h0), where g = 9.8m.s−2 is the acceleration of gravity. We took the average of results obtained from the loading and unloading protocols to minimise the effect of hysteresis.
Each time a new weight (N = 0, 1, . . . , 6) was added, the current film thickness 2h was measured by the OCT image, from which the stretch ratio \({\lambda }_{1}={\lambda }_{3}^{-2}={({h}_{0}/h)}^{2}\) was evaluated (assuming a uniaxial deformation took place), see Supplementary Fig. 12. The measured stretch ratio agreed well with that obtained by the deformation of the grids drew on the surface of the rubber film. The stretch ratio of the film reached λ1 ≃ 1.37 (37% extension) when N = 6.
Materials
The rubber sheet had mass density ρ ≃ 1, 070kg.m−3 and refractive index n ≃ 1.4. The initial dimensions were 2h0 ≃ 0.5 mm, W0 = 16 mm, L0 = 40 mm, large enough to avoid wave reflections at the edges (see Fig. S4 for photos of the sample and the experimental setup). The membrane was prepared from the Ecoflex 00–50 material (Smooth-On Inc), by mixing the Ecoflex rubbers 1A and 1B to 1:1 ratio by weight. The mixture was poured into a mould and cured at room temperature overnight. Then the sample was post-cured in an oven at 80 ∘C for 2 h. To characterise its mechanical properties, we cut a small piece (0.5 × 5 × 18 mm3) from the sample and performed a tensile test with a uniaxial tensile testing machine (eXpert 4000 Micro Tester, Admet, Norwood, USA). By curve fitting we found that the initial shear modulus was μ ≃ 180 kPa and the Landau constant was A ≃ − 1.3 MPa (see Supplementary Note 9). These material parameters were then used to plot the theoretical dispersion curves, although ultimately they are not needed.
We used a common household cling film (plastic wrap) made of 100% polyethylene, with mass density ρ ≃ 930 kg.m−3. The typical thickness of cling film ranges from 8 to 13 μm. Here, we used Brillouin microscopy23 to accurately measure the initial thickness of the film, which was 2h0 = 11.7 ± 0.3 μm. This is close to the axial resolution of the OCT system, and so we could not track h with the deformation.
The bodhrán was purchased from Hobgoblin Music, MN, USA. The OCT measurement was performed on the intact instrument. On separate direct measurements after removing the skin from the frame, we found h0 = 0.36 ± 0.03 mm and ρ = 831 ± 65kg.m−3, respectively. To characterise the fundamental vibration frequencies of the dry and damp bodhrán, the centre of the drumhead was beaten every 10 s and the sound was recorded with a cellphone 10 cm away from the drumhead, using the Google Science Journal App (see Supplementary Note 10).
Data availability
The data that support the findings of this study are available from the authors on reasonable request.
Code availability
The code to get the master graph from the dispersion equation was prepared with Matlab R2021a, which is available from the authors on reasonable request.
References
Gómez-González, M., Latorre, E., Arroyo, M. & Trepat, X. Measuring mechanical stress in living tissues. Nat. Rev. Phys. 2, 300–317 (2020).
Schajer, G. S. Advances in hole-drilling residual stress measurements. Exp. Mech. 50, 159–168 (2009).
Butt, H.-J., Graf, K. & Kappl, M. Physics and chemistry of interfaces (John Wiley & Sons, 2013).
Erbil, H. Y. et al. Surface chemistry of solid and liquid interfaces (Blackwell, 2006).
Aumaitre, E., Vella, D. & Cicuta, P. On the measurement of the surface pressure in Langmuir films with finite shear elasticity. Soft Matter 7, 2530–2537 (2011).
Shi, F., Michaels, J. E. & Lee, S. J. In situ estimation of applied biaxial loads with Lamb waves. J. Acoustical Soc. Am. 133, 677 (2013).
Lanoy, M., Lemoult, F., Eddi, A. & Prada, C. Dirac cones and chiral selection of elastic waves in a soft strip. Proc. Natl Acad. Sci. 117, 30186–30190 (2020).
Thelen, M., Bochud, N., Brinker, M., Prada, C. & Huber, P. Laser-excited elastic guided waves reveal the complex mechanics of nanoporous silicon. Nat. Commun. 12, 1–10 (2021).
Deroy, C., Destrade, M., Mc Alinden, A. & Ní Annaidh, A. Non-invasive evaluation of skin tension lines with elastic waves. Ski. Res. Technol. 23, 326–335 (2017).
Bercoff, J., Tanter, M., Muller, M. & Fink, M. The role of viscosity in the impulse diffraction field of elastic waves induced by the acoustic radiation force. IEEE Trans. Ultrason., Ferroelectr., Frequency Control 51, 1523–1536 (2004).
Berjamin, H., Destrade, M. & Parnell, W. On the thermodynamic consistency of Quasi-linear viscoelastic models for soft solids. Mech. Res. Commun. 111, 103648 (2021).
Rooij, R. & Kuhl, E. Constitutive modeling of brain tissue: current perspectives. Appl. Mech. Rev. 68, 010801 (2016).
Remeniéras, J. P. et al. Acousto-elasticity of transversely isotropic incompressible soft tissues: Characterization of skeletal striated muscle. Phys. Med. Biol. 66, 145009 (2021).
Bied, M. & Gennisson, J. L. Acoustoelasticity in transversely isotropic soft tissues: Quantification of muscle nonlinear elasticity. J. Acoustical Soc. Am. 150, 4489–4500 (2021).
Hartmann, K., Stein, K. P., Neyazi, B. & Sandalcioglu, I. E. Optical coherence tomography of cranial dura mater: Microstructural visualization in vivo. Clin. Neurol. Neurosurg. 200, 106370 (2021).
Ramier, A., Tavakol, B. & Yun, S.-H. Measuring mechanical wave speed, dispersion, and viscoelastic modulus of the cornea using optical coherence elastography. Opt. Express 27, 16635–16649 (2019).
Li, G.-Y. et al. Guided waves in pre-stressed hyperelastic plates and tubes: Application to the ultrasound elastography of thin-walled soft materials. J. Mech. Phys. Solids 102, 67–79 (2017).
Rogerson, G. & Fu, Y. An asymptotic analysis of the dispersion relation of a pre-stressed incompressible elastic plate. Acta. Mechanica 111, 59–74 (1995).
Destrade, M., Gilchrist, M. D. & Saccomandi, G. Third-and fourth-order constants of incompressible soft solids and the acousto-elastic effect. J. Acoustical Soc. Am. 127, 2759–2763 (2010).
Murnaghan, F. D. Finite deformation of an elastic solid (Wiley, 1951).
Hughes, D. S. & Kelly, J. L. Second-order elastic deformation of solids. Phys. Rev. 92, 1145–1149 (1953).
Gandhi, N., Michaels, J. E. & Lee, S. J. Acoustoelastic Lamb wave propagation in biaxially stressed plates. J. Acoustical Soc. Am. 132, 1284–1293 (2012).
Scarcelli, G. et al. Noncontact three-dimensional mapping of intracellular hydromechanical properties by Brillouin microscopy. Nat. Methods 12, 1132–1134 (2015).
Acknowledgements
This study was supported by grants P41-EB015903, R01-EY027653, DP1-EB024242 from the National Institutes of Health (USA) for G.Y.L and S.H.Y; by the 111 Project for International Collaboration No. B21034 (Chinese Government, PR China), by the Seagull Program (Zhejiang Province, PR China), by the National Natural Science Foundation of China (No. 11872329), by the Natural Science Foundation of Zhejiang Province (No. LD21A020001), and by a travel grant from the UK Acoustic Network funded by the EPSRC (EP/R005001/1) for M.D.; by the Shift2Rail grant from the European Commission - Horizon 2020, and by the EPSRC (EP/V012436/1) for A.L.G. For the purpose of Open Access, the authors have applied a Creative Commons Attribution (CC BY) licence to any Author Accepted Manuscript version arising. The authors thank Amira Eltony and Xu Feng for help with the measurements, and Pasquale Ciarletta, Niall Colgan and Giuseppe Zurlo for valuable feedback.
Author information
Authors and Affiliations
Contributions
G.Y.L., A.G., and M.D. conceived the study. G.Y.L., A.G., and M.D. developed the theoretical model. G.Y.L. conducted the experiments. G.Y.L. and S.H.Y. analysed the results. All authors wrote, reviewed and revised the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Physics thanks Anthony Mulholland and the other, anonymous, reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Li, GY., Gower, A.L., Destrade, M. et al. Non-destructive mapping of stress and strain in soft thin films through sound waves. Commun Phys 5, 231 (2022). https://doi.org/10.1038/s42005-022-01000-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s42005-022-01000-3
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
