
Abstract
Leg stiffness plays a key role in the storage and release of elastic energy during stance. However, the extent to which a runner is able to reuse stored energy remains a limiting factor in determining their running effectiveness. In this study, ten habitual rearfoot strikers and ten habitual forefoot strikers were asked to run on a treadmill in three footwear conditions: traditional, neutral, and minimal running shoes. We examined the effect of habitual foot strike pattern and footwear on leg stiffness control within three task-relevant phases of stance (i.e. touch-down, loading, unloading). Control was quantified using stride-to-stride leg stiffness time-series and the coefficient of variability and detrended fluctuation analysis (DFA). The results are interpreted within a theoretical framework that blends dynamic systems theory and optimal feedback control. Results indicate that leg stiffness control is tightly regulated by an active control process during the loading period of stance. In contrast, the touch-down and unloading phases are driven mostly by passive allometric control mechanisms. The effect of footwear on leg stiffness control was inconclusive due to inconsistent trends across three shoe types. However, stiffness control was affected by landing technique. Habitual rearfoot strike runners have reduced DFA values during the touch-down and unloading phases. These sub-phases are associated with an allometric control process and suggests that rearfoot strike runners express a reduction in system complexity for leg stiffness control and hence, a less adaptable system.
Similar content being viewed by others

Introduction
For humans who engage in long distance running, the control of leg stiffness is important for performance and injury1,2,3. Experimental data and theoretical models from human and animal studies suggest that effective leg stiffness during steady-state running functions as to optimize the competing costs of energy, postural instability and injury risk4,5,6,7. Effective leg stiffness has been a useful expression of economy because it reflects global muscle–tendon unit behaviour8. For example, energy efficient solutions are achieved when sufficient energy in the muscle–tendon unit is stored and recovered from the loading phase to the unloading—propulsive—phase9,10,11,12. Clinical studies of human running support an ideal leg stiffness range for safe locomotion, with evidence that suggests skeletal injuries are associated with too-high leg stiffness, while muscle–tendon injuries are associated with too-low leg stiffness13,14. Hence, a runner’s locomotor system must control leg stiffness to optimise task priorities. However, the nature of leg stiffness control, and the neuro-mechanical factors that influence control, are mostly unknown. Understanding the process for leg stiffness control both within a period of stance and between cycles, will provide valuable insights for multiple issues surrounding running performance, musculoskeletal loading of body structures and injury prevention.
Motor solutions that utilise elastic structures to store and contribute energy are essential for efficient and effective propulsion12,15. Muscle–tendon units store this energy during the loading phase and this requires control of a unit’s force–length dynamics16. This control task is made challenging when external forces are unpredictable, such as foot-to-ground contacts during running. Approximately 80% of experienced runners use impact-assistive shoes and adopt a rearfoot strike (RFS) loading technique during touchdown17,18,19. When such loading patterns are compared with a minimal-assisted forefoot alternative, the RFS pattern has a larger leg effective mass20,21 and inconsistent, high-frequency, force loading profiles20,22,23,24. Hence, it is reasoned that the landing technique is likely to affect the muscle–tendon unit mechanism for the purpose of energy storage during loading and, the subsequent utility of energy recovery during unloading. Given that optimising leg stiffness is a priority of running, and stiffness control is affected by condition of landing technique and substrate compliance, then a change to any combination of these two conditions should be matched with an active goal-relevant response by the locomotor controller.
There is contrasting evidence on the effect of foot strike and footwear on leg stiffness, with some reporting greater impact loading and a stiffer leg during landing when wearing more cushioned shoes25,26,27; while others found no differences between running in traditional and maximalist footwear and also a more rigid limb in minimalist footwear28. Discrepancies in these findings may reflect an altered motor control strategy to adjust leg stiffness during the time course of loading and unloading. Before we propose our predictions and a suitable test method, a brief overview of human motor control theory is necessary to setup our paradigm of leg stiffness control.
The locomotor control system is often considered as a hierarchical structure, and accordingly, it has been successfully modelled by combining two relevant theories29,30. Dynamical systems theory31 and optimal feedback control theory32 represent the levels of this hierarchical structure (Fig. 1). The system is actively supervised by a high-level controller that adheres to the principle of minimum intervention32,33,34. Because intervention is costly, the controller prefers to manage task goals by deferring to a low-level self-organising processes that expresses quasi limit-cycle behaviour, where biomechanical trajectories are passively attracted to dynamic stable states35,36. Optimal control also becomes easier when part of the problem is offloaded to the low-level controller30. In essence, the locomotor control system will express complex self-organisation behaviour, unless intervention is warranted by a higher-level supervisor. A variety of evidence shows that the structure of complex limit-cycle behaviour is modified when this ‘lower-order’ system is subjected to an external ‘higher-order’ intervention33,37,38. The ‘lower-order’ property of the model belonging to complexity and dynamical systems theory has relevance for the question in this study: how does shoe-assisted rearfoot loading influence the inherent flexibility of the locomotor control system that is relevant to leg stiffness? The premise is that a high degree of system complexity (rich dimensionality of system resources) is desirable for the high-level controller that prefers minimal regulation of control. Therefore, by quantifying complexity we can observe relative level of control regulation, and hence we can gain insight of the embodied ‘low-order’ state of the locomotor system that is relevant to the default mode of stiffness control.

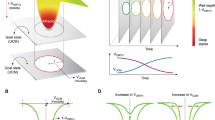
Theoretical hierarchical control model. According with the dynamical systems theory and optimal feedback control theory, motor actions are controlled by a two-level hierarchical structure. The low-level controller is a self-organising entity exploiting the inherent complexity of the system; its allometric control allows solutions to emerge and flexibility to increase. The high-level controller actively supervises motor action and intervenes only when necessary. This minimize the costs associated with active intervention such as excessive energy expenditure, less variable performance, and unrestricted workspace. This figure has been generated by researcher AG using Windows PowerPoint 2016.
Among many tools that quantify system complexity, one approach—Detrended Fluctuation Analysis (DFA)—has successfully demonstrated an ability to detect the level of intervention by the central nervous system to regulate locomotor control by examining persistence (i.e. a scale of self-similar structure) in the time-series of a known control parameter or performance variable of gait37,39,40,41. Gait parameters that express time-series persistence are considered to be an expression of a complex self-organised system37,42,43, while anti-persistent structure (random correlations) suggests higher-order intervention33,44. Therefore, if the high-level controller top-down intervention is active then it will cause an interruption to time-series persistence (i.e. low DFA value), and a subsequent sensitive change to the task performance (i.e. high coefficient of variation) will be evident because the high-level controller would only choose the cost of intervention if it could effect a sufficient change to a task goal. Also, within an embodied system there will be no change to the complexity of the system provided that the conditions of the task are consistent.
If we can discern when the higher-levels of the locomotor control system intervene to regulate leg stiffness, then we can gain important insights into human running that extend beyond issues of foot strike technique and footwear design. The interplay of a hierarchical control system is a critical issue that is overlooked in nearly all studies that use an analysis of time-series persistence to gain insight into the human locomotor system, where many studies are limited to interpret their findings through a restricted framework (for example45,46). With the exception of Dingwell, Salinas47, there are no studies (investigations of the gait control system) that have attempted to reconcile the quantification of dynamic fluctuations of critical (goal-relevant) parameters through the framework of a two-level hierarchical control system48. This study is the first to afford an insight into the dual nature of the interactive control systems governing the determinants of running, specifically leg stiffness.
We test the hypothesis that two different types of runners classified by foot strike landing technique with habituation to a specific substrate (i.e. footwear assistance), will show differences in their regulation of leg stiffness control. We expect this difference to be due to their landing technique and their embodied neuro-musculoskeletal systems they acquire from this habitual condition. In addition, we test the hypothesis that when the runners perform a repeat test using the same landing technique, but receive a change in the level of footwear (substrate) assistance, we expect to see a relative change to their control regulation and a proportionate relative change to the consistency of their task performance. The outcomes will form support for the theories of leg stiffness control during running and add important new insights to complement the debate about the effect of footwear and landing technique on human running, which up till now has been dominated by biomechanics perspective. Furthermore, the results will provide evidence for the existence of a hierarchical locomotor control system that defaults to a ‘low-level’ embodied with complexity (i.e. flexibility).
Results
Leg stiffness control policy during the stance phase
The investigation of control responsibility confirmed that both groups adopt the same kleg control policy: high-level intervention control occurs at K2, while low-level control occurs at K1 and K3. This claim is based on the correlations of ΔDFAα with ΔCV, which were consistent for both RFS and FFS (Table 1). There was a significant main effect of Phase on DFAα (p < 0.001, Table 2), indicating that DFAα was dependent on stance phase task. Post hoc tests reveal that DFAα is higher (p < 0.001) at K3, compared to K2. The variability of the final force–length state at the end of the loading phase (ΔEllipse Area) was correlated with both ΔDFAα and ΔCV (Table 3) showing that reduced ΔDFAα is associated with increased ΔEllipse area.
Group effect on the control of leg stiffness
There was a higher DFAα for FFS compared to RFS indicated by a significant main effect for Group (p = 0.027, Table 2). There was a trend for a group × phase interaction effect on the DFAα (p = 0.113, Table 2, Fig. 2), indicating a potential difference between groups in the way they regulate the control of stiffness between phases. Planned contrasts compared the groups change in DFAα between phases K1 and K2 (p = 0.017) and between K2 and K3 (p = 0.067). Groups differ in their control policy from touch-down phase (K1) to loading phase (K2), while both groups reduce tight control of kleg during transition from loading (K2) to unloading (K3); in this transition, the FFS group made a relatively higher change to DFAα compared to RFS (Fig. 3). Pairwise comparisons within-FFS group show they have higher DFAα at both touch-down (p = 0.044) and unloading (p < 0.001) when compared to loading.

Group mean and SD of DFAα values averaged across shoe types for each group, and over the three task-relevant sub-phases of the stance phase. Bar graphs show between-group (FFS vs RFS) differences for average DFAα and average CV across sub-phases and shoe type. *Represents significance level p < 0.05; for group × phase interaction effects, and pairwise comparisons for between group and between phase.

Group mean and SD for each task-relevant phase (K1-K3) and shoe type (LOW, MED, HIGH) for dependent variables: (A) DFAα of leg stiffness, (B) mean leg stiffness, and (C) CV of leg stiffness. Magnified scale in (B,C) for sub-phases K2 and K3.
Interaction effect of phase and group on leg stiffness control
Figure 3 demonstrates the effect that the experimental conditions had on mean kleg (3B) and its variability (3C), and how this differs between group, and phases. However, there are no consistent trends between kleg variance (3C) and control regulation (3A) when examining group behaviour. For the dependent variables CV and mean kleg the significant main effect of Phase (p < 0.001; Table 2, Fig. 3) was not unexpected. Pairwise comparisons show that kleg is stronger (p < 0.001) and more inconsistent (p < 0.001) at K1 compared to K2; while kleg at K2 is stronger (p < 0.001) and more inconsistent (p < 0.001) compared to K3 (Supplementary Appendix Table S1). However, while both groups display a similar mean (p > 0.05) and CV (p > 0.05) of kleg during K2, their behaviour at K1 and K3 is different (Supplementary Appendix Table S1). Hence, there was a significant interaction effect of Phase × Group on mean and CV of kleg (p = 0.041 and p = 0.031 respectively; Table 2, Fig. 3). For direct within-group pairwise comparisons between K1 and K3, both groups had a greater (p < 0.001) mean kleg and a larger (p < 0.001) CV at the touchdown phase (K1). For between-group comparisons, RFS exhibited a greater (p = 0.034) mean kleg, while FFS exhibiting larger (p = 0.023) CV.
Shoe effect on control of leg stiffness
For the dependent variable DFAα: shoe did not have a significant effect on the interaction between group × phase × shoe (p = 0.178; Table 2, Fig. 3); there was no main effect for shoe (p = 0.250), nor interaction effects for shoe × group (p = 0.942) or shoe × phase (p = 0.846). Therefore, the interaction effect of shoe did not change the group × phase behaviour identified in our second hypothesis.
Discussion
We investigated three hypotheses related to the control of leg stiffness in human running. First, that leg stiffness is governed by tight control regulation during the loading phase. Second, that leg stiffness control will be affected by landing technique (rearfoot, forefoot). Third, that footwear assistance will reduce the need for control regulation of leg stiffness. In summary, we found that the control system responsible for kleg varies between high-level and low-level control processes, and this dual interplay depends on the task objective inherent to the stance sub-phases: touch-down, loading, and unloading. Second, we found that control processes that regulate kleg are affected by the foot strike technique adopted. Third, while mean kleg of RFS runners was dependent on footwear assistance and contrasted with forefoot strike runners whom maintained consistent mean kleg irrespective of footwear assistance, the acute effect of footwear assistance on control capacity of kleg was not conclusive. These hypotheses are addressed in detail below.
The first hypothesis was supported, where control regulation of kleg shows variable contributions of high- and low-level control systems, and is task (sub-phase) dependent. While a low DFAα during the loading phase suggests high-level intervention, if the associated effect is unknown then this result could simply be an expression of reduced complexity inherent to low-level control processes. We overcame this dilemma by analysing a recognised control parameter of running (kleg), and by subtle variations of experimental conditions (i.e. footwear type) that probe kleg control. Hence, we were able to associate a change in control process (statistical persistence) of kleg with change-in performance (magnitude of the variance) of kleg, and therefore reconcile the responsible system that regulates kleg. The significant negative correlation between kleg persistence (DFAα) and kleg variability (CV) during the loading phase supports the claim that an increase in kleg CV is associated with decreases in DFAα. A similar association between variance magnitude of performance and underlying control process from the subtle probing of gait conditions has been recently supported39. This negative correlation is expected because undesirable states of kleg should require regulation and active intervention from high-level control. Because there are varied initial states of kleg, there will be an equally varied response in kleg to return the leg force–length dynamics to the goal-state. In other words, when the system makes a large response by producing a highly consistent kleg from highly variable initial state, we find that these cases are associated with low DFA values. This reduction in DFA is most likely the expression of high-level control intervention.
To support our hypothesis that kleg is indeed the controlled variable during the loading phase (K2), we also tested the persistency during the sub-phases of the stance of the two components (change in force, and change in leg length) that we used to compute kleg. One could argue that control of leg stiffness could be achieved indirectly by direct control over one of the two components. We found that DFAα values for leg stiffness were lower during the loading phase (K2) than either change in force or change in leg length (Fig. 4) confirming direct control over leg stiffness.

Mean and SD of DFAα values for leg length effector, ground reaction force, and leg stiffness averaged across shoe types and group, over the three task-relevant sub-phases of the stance phase. *Represents significance level p < 0.05; for component × phase interaction effects, and pairwise comparisons for between component within phase.
During touch-down (K1) the controller works to stabilize external forces exploiting the flexibility in leg length and leg stiffness. While during unloading (K3) the controller is more attentive to changes in leg length component than the force. Over the stance phase the priorities of the control system change so that safety is prioritized at touch down (by controlling external forces), storing of elastic energy is prioritized during loading (by controlling leg stiffness), and stability of body centre of mass trajectory is prioritized during unloading (by controlling leg length).
Our expectation that kleg during the unloading phase would be governed by low-level control process was supported. The unloading of the leg is where stored elastic energy of the muscle–tendon unit is recovered from the eccentric loading phase to assist with leg extension and forwards acceleration of the body15. The result that FFS have lower kleg during unloading (Fig. 3) suggests that for FFS runners, their leg lengthening can be achieved with less force contribution. This could be due to their body posture (ease of lengthening for a given GRF), but it could be due to passive contributions from tendon utility. The relatively high persistence (DFA) of kleg during unloading indicates the high-level controller defers to the low-level controller (i.e. minimal intervention). This affords some advantages for optimal control of kleg. First, by avoiding high-level intervention the search for movement solutions through the neuro-motor workspace can occur relatively unrestricted49. In theory, this workspace expansion enables a more efficient allometric search process to find the coordinated motor commands that optimise energy recovery from the given initial state expressed by the muscle–tendon units. Second, allometric control is associated with less variability in performance (Table S1). Third, allometric control minimises the energy expense caused by decision making by the high-level controller50. This default strategy of deferring to the low-level controller (also referred to as the minimal intervention principle) is based on theoretical construction behind successful simulation studies that follow an efficient search process to achieve optimal control30,49,51.
Based on the premise of low-level control being the default mode, we also expected kleg control during the touch-down phase to be under low-level control because it is a brief transitory period, which would be difficult for high-level control processing to achieve a target outcome52. Support for this hypothesis was evident in the FFS group based on two criteria: first, there was a relatively high DFA compared to loading phase, and second, any change in DFA was not associated with a change in CV. In contrast, while the RFS group demonstrated no association of the ΔDFA-ΔCV relationship, they also did not demonstrate a relatively higher DFA during touch-down. There are two explanations for a low DFA during touch-down: first, the complexity of the system is reduced; and second, there is high-level control during the pre-landing phase. The first explanation is most likely because we found no association of ΔDFA-ΔCV for the RFS group (i.e. no beneficial effect on kleg consistency if there was investment of high-level control). In all cases, the kleg variance was highest during the primary touch-down phase (i.e. an inconsistent kleg state); thus to compensate it is reasonable to expect tight regulation by the high-level controller to achieve a given goal-state at the conclusion of the loading phase. In contrast, because DFA change was not correlated with kleg change during the touch-down and unloading phases, we reason that inherent allometric control is responsible for governing leg force–length dynamics during these sub-phases of stance.
Based on the criteria above, we conclude that long-distance runners with a rearfoot strike landing technique express a reduction in system complexity for controlling kleg, therefore confirming our second hypothesis. Results suggest that RFS running may enhance specialisation of biomechanical patterns (low CV) but at the expense of flexible force–length solutions; RFS runners have a more consistent kleg (i.e. low CV) during both touch-down and unloading phases.
We expected that runners would require less control regulation when running in their preferred shoe type compared to less-preferred shoes. Based on the knowledge that even small changes in habitual shoes’ properties can influence the maintenance of leg stiffness53, alter performance54 and could deeply modify the intricate muscle–tendon mechanics of running55, leg stiffness control should also increase away from habitual conditions. However, we found that during touch-down phase (K1) of FFS there was a tendency for system entropy to reduce when the shoe assistance was reduced (Fig. 3A, Table 2); this was unexpected because reduced footwear assistance (high MI index) was expected to expand system dimensionality and expression of complexity56,57. Nevertheless, compared to RFS that kept a constant level of DFAα, FFS adapted the control of kleg as they changed shoe. The effect of habitual RFS running seems to affect the embodied complexity of their inherent locomotor search space for regulating leg stiffness.
With this knowledge, runners, coaches, and clinicians may select a combination of foot strike and footwear conditions that challenge kleg control at specific stance sub-phases on the basis of training (performance) and/or rehabilitation goals. Based on the finding that the landing is less critical for FFS, because they can defer to the allometric control, and that FFS lower kleg during unloading suggests a better ‘bounce’, or energy return, we also speculate that forefoot strike technique gait retraining may be recommended for safety and efficiency25,58.
This study has several limitations. First, we considered that shoes classified by a minimalist index ‘MI’ provides equivalent loading and unloading control assistance for both RFS and FFS runners. It is possible that assistance can change between loading and unloading. Furthermore, a low MI shoe could be assistive for a RFS runner but un-assistive for a FFS runner. The different effects of shoe on group could have prevented the identification of optimal shoe-type for optimal loading–unloading control. Second, we interpret DFAα results as representing the compound effects of system complexity (expansion of degrees of freedom dimensionality) and active top-down control regulation (Fig. 5). We based our interpretation on the idea that the active top-down control intervention is expressed by a relative change in two properties (a decreased DFAα and increased CV), meaning that an active top-down control intervention must exist because kleg converges towards a less variant state. Future studies should test this theory by validating appropriate model simulations of inter-related parameters (e.g. leg force–length and leg stiffness) with empirical data (e.g.33). Last, we have to acknowledge a limited sample size and a gender restriction that limits generalisation of the results. The strict inclusion criteria were necessary to ensure the sample of selected runners was an appropriate representation of the population they were intended to represent and their demographics were equivalent between groups (i.e. body mass, average running load per week).

Theoretical framework to interpret DFA results of leg stiffness. Leg stiffness is computed within three sub-phases (K1–3), based on the respective change in the initial and final leg force–length states. The persistence of leg stiffness is quantified from a time-series of multiple stride cycles (j, j + 1,…, j + n), forming a distribution of slope values. The DFAα value is determined by factors that either restrict or expand the degrees of freedom (DoF) of the embodied neuro-motor system. This modulation is due to the combined interaction of two general factors: high-level control and inherent biological affordance. For example, if the change in length–force (i.e. between K1 and K2) is free to vary the system can express its full complexity resulting in a high DFA α value. On the other hand, if there is an increased high control intervention or an inherent low complexity of the system the DFA α value is low (right panel). In this case, if the change in length–force profile is constrained toward a smaller portion of the state space it represents the active high control intervention; if not, the system expresses its low complexity. This figure has been generated by researcher AG using Windows PowerPoint 2016.
To conclude, we provided evidence for the dual nature of the interactive hierarchical control systems governing leg stiffness during running, and we showed how the task specific sub-phase of loading required a greater contribution of higher-level control intervention while the landing and unloading sub-phases defer governance to self-regulatory lower-level control. The likely reason for high-level intervention during loading can be attributed to a combination of competing and compounding cost factors that cannot be optimized simultaneously (e.g. energy, stability, and injury avoidance). While explicit nature of control policies was outside the scope of this study and require future investigation, the essential effect was consistent across all runners. However, habitual rear foot strike runners may have developed a restricted repertoire of biomechanical patterns at the expense of flexible force–length solutions to regulate leg stiffness. While habitual forefoot strike runners may rely on such flexibility to make landing safer and unloading more efficient.
Methods
Participants
A priori power calculation was conducted with the program G*POWER59; based on previous studies60,61 ten participants for each group were required to detect an effect size of 0.3 with 80% power and a 5% significance level using repeated measure, within-between interactions (ANOVA). Twenty competitive male long-distance runners (age: 31.2 ± 6.9 years, height: 1.77 ± 0.07 m, weight: 73.4 ± 7.9 kg, training load: 83 ± 22.5 km/week, age-graded score: 67.8 ± 6.4%) met the following inclusion criteria: running volume of at least 40 km/week, had been free of neurological, cardiovascular, and musculoskeletal problems (i.e. pain, soreness or injuries) within the previous six months. The age-graded score was computed via (www.howardgrubb.co.uk/athletics/wmalookup06.html) according to runners age, gender, and self-reported best race performance, similar to62. All participants were classified as competitive runners given an age-graded score of > 60%63. Participants gave their written informed consent to be part of the study. They were grouped according to a foot strike classification criteria proposed by Garofolini, Taylor64: forefoot strike runners (FFS, n = 10) if they demonstrated a higher proportion of ankle plantar-flexor work during the initial touch-down period of stance; conversely, rearfoot strike runners (RFS, n = 10) had a larger proportion of ankle dorsi-flexor work. The Victoria University Research Ethics Committee has approved the study (No. HRE16-061). All research was performed in accordance with the Declaration of Helsinki.
Experimental protocol
Running tests were performed on an instrumented treadmill (Advanced Mechanical Technology Inc., Watertown, MA, USA) collecting three-dimensional ground reaction force data at 1000 Hz. Our instrumented treadmill included a stiffening frame to reduce the effect of low resonant frequencies65. Three-dimensional kinematics data were collected at 250 Hz by a fourteen cameras VICON system (Oxford Metrics Ltd., UK), and time-synchronized with ground reaction force data within the same system. A trunk and lower-limb biomechanical model was reconstructed from 45 retroreflective markers, for model details see Garofolini, Taylor66.
After completing a standardized and progressive 7-min warm-up, participants repeated a 5-min running test three times, with a different shoe for each trial. The three shoe models were differentiated by their minimalist index (MI); a range from 0 (maximum assistance) to 100% (least interaction with the foot)67. The shoes adopted in our experiment were classified at low MI (Mizuno Wave Rider 21, MI = 18%), medium MI (Mizuno Wave Sonic, MI = 56%), and high MI (Vibram Five Fingers, MI = 96%) see Supplementary Appendix Table S2. Treadmill speed was fixed at 11 km/h for all test conditions as this was a comfortable pace for all participants.
Data analysis
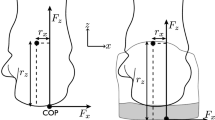
Raw kinematic and kinetic data were exported from Nexus 2.6 (VICON, Motion Systems, Ltd., Oxford, UK) to Visual 3D (C-motion Pty, USA) for processing and parameterisation. The kinematic and kinetic signals were low-pass filtered using a 4th order, zero lag, Butterworth filter, with cut-off frequencies of 15 Hz and 35 Hz, respectively. Leg stiffness, kleg, was calculated by the ratio ΔF/ΔL within each phase, where ΔF is the change in the resultant ground reaction force, while ΔL represents the within-phase change in normalised leg length (by standing leg length) of a 3D vector: from pelvis segment centre of mass to centre of pressure. Given the multiplane nature of limb movements, the multiplanar method is most complete to compute leg stiffness68. Gait events were defined using the vertical component of the ground reaction force—an ascending and descending threshold of 20 N identified foot contact (FC), and toe-off (TO), respectively. Within this time period, four other events were created from the body-weight normalised ground reaction force signal when it exceeded both 0.2 and 1.0 body weight (BW), when it reached a maximum, and when it descended below 0.2 BW. The stance period was sub-divided into three task-relevant sub-phases: touch-down (K1, from 0.2 to 1BW); loading (K2, from 1BW to peak force); and unloading (K3, from peak force to 0.2BW). A stride-by-stride time series of kleg for each of the three phases was exported to Matlab (The MathWorks Inc., Massachusetts, US) for computing stiffness control parameters: mean, coefficient of variability (CV), and statistical persistence (DFAα).
Detrended Fluctuation Analysis (DFAα) was developed to measure the scaling index of complex systems, such as the locomotor control system. For stride-to-stride time-interval regulation, the DFAα reveals long-range correlations, indicating an underlying allometric self-organised control process38. However, an alternative perspective of the DFAα is that complexity can be affected by an external agent, such as central nervous system intervention. Here, the DFA was applied to contrast inter-related parameters of gait to reveal goal-relevant parameters that are under tight control33. Both empirical data and simulation models of the locomotor control system demonstrate that either a regulating external agent, or reduction of inherent complexity, can have similar effects on the break-down of statistical persistence37,69,70.
DFAα values from 0.6 to 1.0 indicate relatively higher statistical persistence; while a break-down of persistence occurs when α values converge towards 0.533,71. Under the model of hierarchical locomotor control, the minimum intervention principle and dynamical systems theory, α values are interpreted as the combined product of both control regulation (cognitive, high-level control) and system complexity (biological, low-level control). Specifically, high α values (≈ 1.0) can be due to either loose control regulation or a highly complex system, while low α values (≈ 0.5) can be due to either tight control regulation or a system that has reduced complexity. The interpretation of results related to DFA require an understanding based on the two-system control hierarchy model previously explained. Under this model, both control levels can independently effect a reduction in statistical persistence; reflecting a constraint of embodied neuro-musculoskeletal entropy at the low level, or increased control regulation from high level (Fig. 5).
It has been shown that signal complexity is reduced in locomotor systems affected by disease and ageing42, and from fatigue and injury46. Essentially, these biologically affected locomotor systems also demonstrate a loss of persistence; but in contrast to control regulation effects on persistence, the biological effects are indicators of an inherently less complex and flexible system. Two investigations by Dingwell, Bohnsack-McLagan44 and Dingwell and Cusumano33 used experimental data to validate the theory that persistence is an indicator of central nervous system intervention to correct goal-relevant deviations of gait parameters. In the present study we adopt this signal analysis tool and general control regulation theory—but without the model validation—and employ it to assess empirical data of stride-to-stride leg stiffness time-series.
A system with an expanded level of entropy will express persistence in time-series and its processes will functionally interact within and between spatio-temporal scales72. Such a flexible system will have a larger set of abundant solutions to satisfy the goals (length–force dynamics) of the control system73. There is more likelihood that the high entropy system will self-regulate divergent trajectories to a stable state through its inherent allometric control processes74. This suggests that an optimal leg length–force (leg stiffness) state can emerge as a goal-relevant solution from a low-level control process. Therefore, in a high entropy system, there will be less need for intervention on divergent trajectories, and such parameters represented as a time series will show relatively high statistical persistence (approximating 1/f-type noise). In essence, the low-level allometric control processes of a high entropy system are highly flexible. We computed statistical persistence from a customised Matlab program that followed conventional DFA methods38,75. Specifically, the scaling exponent was derived from average fluctuations computed from a linear line-of-best-fit for non-overlapping equal sized windows (time scales) of length, w = [9, 17, 33, 65, 129].
To test the hypothesis that a high-level control intervention will determine a reduction in kleg variability, we compared the between-trial change in control process (ΔDFAα) and change in performance outcome (ΔCV) and analysed whether control process is related to performance outcome. For minimal-assisted forefoot loading runners (FFS), changes in DFAα and CV were computed between running trials in moderately assisted shoes (med MI) and minimal assisted shoes (high MI). Likewise, for shoe-assisted rearfoot loading runners (RFS), changes were computed between running trials in high assistance shoes (low MI) and in moderate assisted shoes (med MI). Results were also combined for RFS and FFS within each task-dependent phase of stance (K1, K2, and K3). Moreover, to confirm a change in mean kleg variability, we quantified the distribution of force-leg length values at the final state of K1 and K2 by fitting a 2D ellipse with 95% confidence; the ellipse area in K2 was first normalised by the CV in K1, then the change in ellipse area was computed following the same logic explained above for DFAα and CV.
Statistical analysis
All data were normally distributed on the basis of the Shapiro-Wilks test. To test contributions of low-level and high-level control, Pearson r correlations were performed between change in control process (ΔDFAα) and change in performance outcome (ΔCV) at K1, K2 and K3; likewise, change in distribution (ΔEllipse Area) of mean kleg values were correlated to change in DFAα and CV at K1, K2 and K3. Mean and coefficient of variation (CV) were computed for each group × shoe × phase condition. Because the biomechanical attributes and functional roles between left and right limbs can often be asymmetric, we considered dominant and non-dominant limbs of the participants as separate cases (i.e. nFF = 20, nRF = 20). A mixed design 3-factor (group × shoe × phase) repeated-measures ANOVA was used to examine the interaction and main effects of within-subject factors of shoe (3 levels: low MI, medium MI, high MI) and task-dependent Phase (3 levels: K1, K2 and K3—touch-down, loading, unloading), and between-subject factor of foot loading type Group (2 levels: forefoot, rearfoot) on the three dependent variables of kleg (mean) and kleg control (CV, DFAα). Significance was set at 0.05 for all tests. Planned contrasts examined specific levels of an interaction effect between group, phase and shoe. Tukey post-hoc analysis was used to test multiple pairwise comparisons. All statistics were performed using SPSS software (version 25, SPSS Inc., Chicago, IL, USA).
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Almeida, M. O., Davis, I. S. & Lopes, A. D. Biomechanical differences of foot-strike patterns during running: A systematic review with meta-analysis. J. Orthop. Sports Phys. Ther. 45(10), 738–755 (2015).
Valenzuela, K. A. et al. Effect of acute alterations in foot strike patterns during running on sagittal plane lower limb kinematics and kinetics. J. Sports Sci. Med. 14(1), 225–232 (2015).
LeBlanc, M. & Ferkranus, H. E. Lower extremity joint kinematics of shod, barefoot and simulated barefoot treadmill running. Int. J. Exerc. Sci. 11(1), 717–729 (2018).
Shen, Z. & Seipel, J. Effective leg stiffness of animal running and the co-optimization of energetic cost and stability. J. Theor. Biol. 451, 57–66 (2018).
Shen, Z. & Seipel, J. The leg stiffnesses animals use may improve the stability of locomotion. J. Theor. Biol. 377, 66–74 (2015).
Seyfarth, A. et al. A movement criterion for running. J. Biomech. 35(5), 649–655 (2002).
Daley, M. A., Voloshina, A. & Biewener, A. A. The role of intrinsic muscle mechanics in the neuromuscular control of stable running in the guinea fowl. J. Physiol. 587(Pt 11), 2693–2707 (2009).
Farley, C. T. & Gonzalez, O. Leg stiffness and stride frequency in human running. J. Biomech. 29(2), 181–186 (1996).
Kuo, A. D. Energetics of actively powered locomotion using the simplest walking model. J. Biomech. Eng. 124(1), 113–120 (2002).
Ruina, A., Bertram, J. E. & Srinivasan, M. A collisional model of the energetic cost of support work qualitatively explains leg sequencing in walking and galloping, pseudo-elastic leg behavior in running and the walk-to-run transition. J. Theor. Biol. 237(2), 170–192 (2005).
Cavagna, G. A. At high running speeds, power developed each step during the push appears to be sustained by elastic energy. J. Appl. Physiol. 108(4), 1016 (2010).
Lai, A. K., Arnold, A. S. & Wakeling, J. M. Why are antagonist muscles co-activated in my simulation? A musculoskeletal model for analysing human locomotor tasks. Ann. Biomed. Eng. 45(12), 2762–2774 (2017).
Granata, K., Padua, D. & Wilson, S. Gender differences in active musculoskeletal stiffness. Part II. Quantification of leg stiffness during functional hopping tasks. J. Electromyogr. Kinesiol. 12(2), 127–135 (2002).
Williams, D. et al. Lower extremity stiffness in runners with different foot types. Gait Posture 18, 511 (2003).
Wade, L., Lichtwark, G. & Farris, D. J. Movement strategies for countermovement jumping are potentially influenced by elastic energy stored and released from tendons. Sci. Rep. 8(1), 2300 (2018).
Farley, C. T. & Morgenroth, D. C. Leg stiffness primarily depends on ankle stiffness during human hopping. J. Biomech. 32(3), 267–273 (1999).
Hasegawa, H., Yamauchi, T. & Kraemer, W. J. Foot strike patterns of runners at the 15-km point during an elite-level half marathon. J. Strength Cond. Res. 21(3), 888 (2007).
Kasmer, M. E. et al. Foot-strike pattern and performance in a marathon. Int. J. Sports Physiol. Perform. 8(3), 286–292 (2013).
Larson, P. et al. Foot strike patterns of recreational and sub-elite runners in a long-distance road race. J. Sports Sci. 29(15), 1665–1673 (2011).
Lieberman, D. E. et al. Foot strike patterns and collision forces in habitually barefoot versus shod runners. Nature 463(7280), 531–535 (2010).
Clark, K. P., Ryan, L. J. & Weyand, P. G. A general relationship links gait mechanics and running ground reaction forces. J. Exp. Biol. 220(2), 247–258 (2017).
Boyer, E. R., Rooney, B. D. & Derrick, T. R. Rearfoot and midfoot or forefoot impacts in habitually shod runners. Med. Sci. Sports Exerc. 46(7), 1384–1391 (2014).
Hamill, J. & Gruber, A. H. Is changing footstrike pattern beneficial to runners? J. Sport Health Sci. 6, 146 (2017).
Gruber, A. H. et al. A comparison of the ground reaction force frequency content during rearfoot and non-rearfoot running patterns. Gait Posture 56, 54–59 (2017).
Yu, P. et al. Acute effects of heel-to-toe drop and speed on running biomechanics and strike pattern in male recreational runners: Application of statistical nonparametric mapping in lower limb biomechanics. Front. Bioeng. Biotechnol. 9, 821530 (2021).
Kulmala, J.-P. et al. Running in highly cushioned shoes increases leg stiffness and amplifies impact loading. Sci. Rep. 8(1), 1–7 (2018).
Lussiana, T., Hébert-Losier, K. & Mourot, L. Effect of minimal shoes and slope on vertical and leg stiffness during running. J. Sport Health Sci. 4(2), 195–202 (2015).
Gruber, A. H. et al. Leg and joint stiffness adaptations to minimalist and maximalist running shoes. J. Appl. Biomech. 37(5), 408–414 (2021).
Merel, J., Botvinick, M. & Wayne, G. Hierarchical motor control in mammals and machines. Nat. Commun. 10(1), 5489 (2019).
Todorov, E. Goal directed dynamics. In 2018 IEEE International Conference on Robotics and Automation (ICRA) (IEEE, 2018).
Kelso, J. S. & Schöner, G. Self-organization of coordinative movement patterns. Hum. Mov. Sci. 7(1), 27–46 (1988).
Todorov, E. & Jordan, M. I. Optimal feedback control as a theory of motor coordination. Nat. Neurosci. 5(11), 1226–1235 (2002).
Dingwell, J. B. & Cusumano, J. P. Re-interpreting detrended fluctuation analyses of stride-to-stride variability in human walking. Gait Posture 32(3), 348–353 (2010).
Latash, M. L., Gorniak, S. & Zatsiorsky, V. M. Hierarchies of synergies in human movements. Kinesiol. Int. J. Fund. Appl. Kinesiol. 40, 29–38 (2008).
Goswami, A., Espiau, B. & Keramane, A. Limit cycles and their stability in a passive bipedal gait. In Proc. IEEE International Conference on Robotics and Automation (IEEE, 1996).
Goswami, A., Espiau, B. & Keramane, A. Limit cycles in a passive compass gait biped and passivity-mimicking control laws. Auton. Robot. 4(3), 273–286 (1997).
Scafetta, N., Marchi, D. & West, B. J. Understanding the complexity of human gait dynamics. Chaos Interdiscipl. J. Nonlinear Sci. 19(2), 026108 (2009).
Hausdorff, J. M. et al. Is walking a random walk? Evidence for long-range correlations in stride interval of human gait. J. Appl. Physiol. 78(1), 349–358 (1995).
Bohnsack-McLagan, N. K., Cusumano, J. P. & Dingwell, J. B. Adaptability of stride-to-stride control of stepping movements in human walking. J. Biomech. 49(2), 229–237 (2016).
Cusumano, J. P. & Dingwell, J. B. Movement variability near goal equivalent manifolds: Fluctuations, control, and model-based analysis. Hum. Mov. Sci. 32(5), 899–923 (2013).
Dingwell, J. B. & Cusumano, J. P. Identifying stride-to-stride control strategies in human treadmill walking. PLoS ONE 10(4), e0124879 (2015).
Hausdorff, J. M. et al. Altered fractal dynamics of gait: Reduced stride-interval correlations with aging and Huntington’s disease. J. Appl. Physiol. 82(1), 262–269 (1997).
Warlop, T. et al. Gait complexity and regularity are differently modulated by treadmill walking in Parkinson’s disease and healthy population. Front. Physiol. 9, 68 (2018).
Dingwell, J. B., Bohnsack-McLagan, N. K. & Cusumano, J. P. Humans control stride-to-stride stepping movements differently for walking and running, independent of speed. J. Biomech. 76, 144–151 (2018).
Fuller, J. T. et al. The effect of footwear and footfall pattern on running stride interval long-range correlations and distributional variability. Gait Posture 44, 137–142 (2016).
Meardon, S. A., Hamill, J. & Derrick, T. R. Running injury and stride time variability over a prolonged run. Gait Posture 33(1), 36–40 (2011).
Dingwell, J. B., Salinas, M. M. & Cusumano, J. P. Increased gait variability may not imply impaired stride-to-stride control of walking in healthy older adults: Winner: 2013 Gait and Clinical Movement Analysis Society Best Paper Award. Gait Posture 55, 131–137 (2017).
Todorov, E. Optimality principles in sensorimotor control. Nat. Neurosci. 7(9), 907–915 (2004).
Todorov, E. Optimal control theory. In Bayesian Brain: Probabilistic Approaches to Neural Coding (eds Doya, K. et al.) 269–298 (MIT Press, 2007).
Braun, D. A., Nagengast, A. J. & Wolpert, D. Risk-sensitivity in sensorimotor control. Front. Hum. Neurosci. 5, 1 (2011).
Todorov, E. Efficient computation of optimal actions. Proc. Natl. Acad. Sci. 106(28), 11478–11483 (2009).
Acerbi, L., Vijayakumar, S. & Wolpert, D. M. Target uncertainty mediates sensorimotor error correction. PLoS ONE 12(1), e0170466 (2017).
Bishop, M. et al. Athletic footwear, leg stiffness, and running kinematics. J. Athl. Train. 41(4), 387–392 (2006).
Sinclair, J. et al. Influence of footwear designed to boost energy return on running economy in comparison to a conventional running shoe. J. Sports Sci. 34(11), 1094–1098 (2016).
Rao, G. et al. Does wearing shoes affect your biomechanical efficiency? J. Biomech. 48(3), 413–417 (2015).
Lawrence, G. P. et al. The movement kinematics and learning strategies associated with adopting different foci of attention during both acquisition and anxious performance. Front. Psychol. 3, 468 (2012).
Newell, K. M. & Vaillancourt, D. E. Dimensional change in motor learning. Hum. Mov. Sci. 20(4), 695–715 (2001).
Davis, I. S., Chen, T.L.-W. & Wearing, S. C. Reversing the mismatch with forefoot striking to reduce running injuries. Front. Sports Act. Living 4, 794005 (2022).
Faul, F. et al. Statistical power analyses using G* Power 3.1: Tests for correlation and regression analyses. Behav. Res. Methods 41(4), 1149–1160 (2009).
De Wit, B., De Clercq, D. & Aerts, P. Biomechanical analysis of the stance phase during barefoot and shod running. J. Biomech. 33(3), 269–278 (2000).
Sinclair, J., Atkins, S. & Taylor, P. J. The effects of barefoot and shod running on limb and joint stiffness characteristics in recreational runners. J. Mot. Behav. 48(1), 79–85 (2016).
Liu, Q. et al. Classification of runners’ performance levels with concurrent prediction of biomechanical parameters using data from inertial measurement units. J. Biomech. 112, 110072 (2020).
Clermont, C. A. et al. Running patterns for male and female competitive and recreational runners based on accelerometer data. J. Sports Sci. 37(2), 204–211 (2019).
Garofolini, A. et al. Foot strike classification: A comparison of methodologies. Footwear Sci. 9, S129–S130 (2017).
Garofolini, A., Taylor, S. & Lepine, J. Evaluating dynamic error of a treadmill and the effect on measured kinetic gait parameters: Implications and possible solutions. J. Biomech. 82, 156 (2018).
Garofolini, A. et al. Ankle joint dynamic stiffness in long-distance runners: Effect of foot strike and shoes features. Appl. Sci. 9(19), 4100 (2019).
Esculier, J.-F. et al. A consensus definition and rating scale for minimalist shoes. J. Foot Ankle Res. 8(1), 1–9 (2015).
Liew, B. X. et al. A comparison and update of direct kinematic-kinetic models of leg stiffness in human running. J. Biomech. 64, 253–257 (2017).
Goldberger, A. L. et al. Fractal dynamics in physiology: Alterations with disease and aging. Proc. Natl. Acad. Sci. 99(suppl 1), 2466–2472 (2002).
Yogev, G. et al. Dual tasking, gait rhythmicity, and Parkinson’s disease: Which aspects of gait are attention demanding? Eur. J. Neurosci. 22(5), 1248–1256 (2005).
Peng, C.-K. et al. Fractal mechanisms and heart rate dynamics: Long-range correlations and their breakdown with disease. J. Electrocardiol. 28, 59–65 (1995).
van Emmerik, R. E. et al. Comparing dynamical systems concepts and techniques for biomechanical analysis. J. Sport Health Sci. 5(1), 3–13 (2016).
Costa, M. et al. Multiscale entropy analysis of human gait dynamics. Phys. A Stat. Mech. Appl. 330(1–2), 53–60 (2003).
West, B. J. Fractal physiology and the fractional calculus: A perspective. Front. Physiol. 1, 12 (2010).
Bashan, A. et al. Comparison of detrending methods for fluctuation analysis. Phys. A Stat. Mech. Appl. 387(21), 5080–5090 (2008).
Acknowledgements
The authors gratefully acknowledge Mizuno Australia for donating the footwear used in the study.
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions.
Author information
Authors and Affiliations
Contributions
A.G.: Conceptualization, Methodology, Software, Formal Analysis, Investigation, Resources, Data curation, Writing original draft, Writing review and editing, Visualisation. K.J.M.: Conceptualization, Methodology, Resources, Writing review and editing. P.M.: Writing review and editing. S.B.T.: Conceptualization, Methodology, Software, Formal Analysis, Supervision, Writing review and editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Garofolini, A., Mickle, K.J., McLaughlin, P. et al. Insight into the hierarchical control governing leg stiffness during the stance phase of running. Sci Rep 12, 12123 (2022). https://doi.org/10.1038/s41598-022-16263-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-022-16263-7
This article is cited by
-
Assessing the effects of foot strike patterns and shoe types on the control of leg length and orientation in running
Scientific Reports (2024)
-
Leg stiffness and energy minimisation in human running gaits
Sports Engineering (2024)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
