
Abstract
To be fully embraced into mineral exploration, seismic data require to be acquired fast, cheaper and with minimum environmental impacts addressing also the often brown-field highly noisy environment where these surveys are employed. Since 2013 and through a number of case studies, we have been testing a newly developed for urban environment, digital-based 240 m long, seismic landstreamer for mine planning and mineral exploration purposes. Here, we present a pilot study examining the potential of the streamer for deep targeting a known, down to approximately 850 m depth, iron-oxide mineralization in the Bergslagen mineral district of central Sweden. Combined streamer (100-3C-MEMS (micro-electromechanical system), 2–4 m spacing) and 75 wireless recorders (mixed 10 Hz and MEMS, 10 m spacing) were used. A Bobcat-mounted drophammer, 500 kg, was used to generate the seismic signal. Within 4 days, approximately 3.5 km of seismic data using 2–10 m source and receiver spacing were acquired. Reflection data processing results clearly image the mineralization as a set of strong high-amplitude reflections and likely slightly extending beyond the known 850 m depth. This is encouraging and suggests such a cost-effective exploration method can be used in the area and elsewhere to delineate similar depth range iron-oxide deposits.
Similar content being viewed by others


Introduction
Economic metallic deposits have usually strong seismic contrast1, 2, product of velocity and density, with their host rocks. Therefore, at the presence of favourable geometry, size and signal-to-noise ratio, they should be detectable using seismic methods. While seismic methods have considerably better resolution and penetration depths than other geophysical methods, the high acquisition and processing cost poses a constraint in using them routinely for mineral exploration purposes. There is therefore a high demand in reducing this cost in order the method to be established in the mineral exploration sector similar to a variety of other geophysical methods. Decrease in receiver cost and higher quality sensors have allowed some contributions but on the source side this is still an issue.
Within an on-going project involving petrophysical, geological and geophysical studies, we have examined the potential of a newly developed, for urban environment, MEMS-based seismic landstreamer3 for cost-effective mine planning and mineral exploration at two sites in Finland4 and Sweden (this study, Fig. 1), respectively. Seismic landstreamers are not new and have been used since the 80s for mainly urban or in general near-surface (>100 m) applications5,6,7,8,9,10,11,12. The choice of the streamer was justified in this study due to the road accessibility, and the possibility of high-voltage power cables, railroad and noise contamination if the conventional geophone-type sensors were used instead13. Earlier reflection seismic studies14, 15 targeting similar types of commodities (iron-oxide mineralization) in the region, Bergslagen mineral district of central Sweden, as the one in this study further encouraged us to take this initiative. Downhole-logging investigations including full-waveform sonic and laboratory density measurements were conducted16 prior to this study suggesting iron-oxide deposits (magnetite and hematite) in the study area should seismically be detectable. Therefore, with the main objectives of (1) delineating the known mineralization using the seismic landstreamer and (2) checking the penetration depth provided by a readily accessible and cheap Bobcat-mounted drophammer, we conducted a pilot seismic survey in October 2015 within 4 days and using 4 persons only. Here, we present how the data acquisition was carried out and encouraging results obtained.

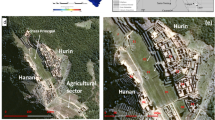
Aerial photo of the Blötberget-Ludvika mining area in central Sweden, and the location of the seismic profile (yellow and red lines). The profile was acquired using a combination of wireless recorders (yellow points) at its both ends and the landstreamer (red points) in between. Green symbols show vertical projection (to the surface) of the known mineralization, two distinct hematite and magnetite mineralized zones dipping at about 40° to the southeast and striking NE-SW. Various size circles show existing boreholes six of which (e.g., BB12004) have so far been downhole logged. The aerial photo is provided as raster image by Lantmäteriet GSD-Ortofoto 1 m (© National Land Survey, i2012/921) through Uppsala University GET (Geo Extraction Tool). The outset figure shows a simplified geology of the Scandinavia (modified from Malehmir et al.19 and produced using the Generic Mapping Tools (GMT) V4.5.0 (https://www.soest.hawaii.edu/gmt/)).
Blötberget iron-oxide deposit
The study area, Blötberget, hosting iron-oxide apatite-bearing ore bodies, is the target of a number of innovative exploration experiments currently on-going16, 17. We have a great level of knowledge on the mineralization and its 3D geometry, also a wealth of geophysical and downhole-logging data16. Important for this study are: (1) there is currently no mining operation although there are plans to reopen the mine, (2) the mineralization is dominantly magnetite but there are horizons where hematite is rich or present notably, and (3) the indicated intact ore is approximately 45 Mt (economic reserves) and is known to extend at least to 850 m depth. The mining operation stopped in year 1979 with most of the mining taking place at approximately 240 m depth at the time of closure.
The mineralization occurs within the inliers of volcano-sedimentary rocks as sheet-like bodies moderately dipping towards southwest down to 850 m depth after which it is unclear if it continues deeper or pinches out due to faulting of folding, or simply dies out. Two sets of distinct mineralization occur, on average approximately 30–50 m apart, with thicknesses varying from a few meters to sometimes over 30 m of magnetite-hematite. Sequences of granitic-pegmatitic rocks occur within the mineralization (likely concordant with the foliation).
Downhole physical property logging
Since 2015, we have downhole logged six boreholes (Fig. 1, BB12004, BB14001, BB14002, BB14004, BB14005 and BB14008) using full-waveform triple sonic, natural gamma, magnetic susceptibility, formation resistivity, fluid conductivity and temperature. The two deepest holes, BB70-001 and BB73-001 are too slim (32 mm) to be logged. In addition to these, density measurements were conducted on core samples at every 1–3 m allowing studying seismic response of the mineralization using synthetic 1D seismograms. Figure 2 shows two examples and why we anticipate reflection seismic method to be suitable for deep targeting the iron-oxide mineralization at the site because of the high impedance contrast of the deposits with their surrounding host rock. Hematite and magnetite in fact show low resistivities and only on the order of 500–1000 ohm-m, which is not so significant to justify electric- or electromagnetic-based methods to be superior even when ignoring their limited depth resolution. Maries et al.16 detail the physical property studies and how the results can be correlated with RQD and other types of measurements.

Example downhole sonic logging and laboratory density measurements from two boreholes (a) BB14005 and (b) BB14002 (for locations see Fig. 1) intersecting the mineralization at 400–450 m depth suggesting, based on 1D synthetic seismograms, a strong seismic signal can be expected from the iron-oxide deposits. Modified from Maries et al.16.
Seismic data acquisition and processing
The seismic data acquisition started after a quick site reconnaissance upon our arrival. Because of a major and high-traffic road running on the southern part of the profile (Fig. 1), it was decided to cover the southern part of the road using 51 wireless recorders connected to 10 Hz geophones and 24 recorders connected to MEMS sensors near the road (also railroad) and at where a small village is present; high electromagnetic noise was anticipated, hence justifying using the MEMS-based wirelesses. The streamer, totally 240 m long, comprising of 5 segments each containing 20 MEMS-based sensors were used right after the road on the northern side of the wireless segment (Fig. 3a). One of the streamer segments contained 20 sensors 4 m apart and the remaining four segments had 2 m sensor spacing. A Bobcat-mounted drophammer (500 kg) was used as the seismic source (Fig. 3b). The acquisition started from the southern-end of the profile with 3 shot records made at each receiver location and then progressed towards the streamer part on the northern side of the road. When shots were made at the last sensor of the streamer, the streamer was moved about 200 m towards the north to a new position while the wireless recorders south of the road kept fixed. The shooting-recording at every new streamer receiver position was then done and again the streamer was moved 200 m forward. The 4-m segment was used for the overlapping purposes and kept usually at the southern tail of the streamer. The streamer was moved seven times after which the wireless recorders placed south of the road were moved to the northern-end of the profile (Fig. 1) to cover that part. We did not think the wireless recorders would be able to record signal further than 1.5–2 km offset and wanted to make sure large offsets are also available on the northern part of the profile. Data recording then continued with the streamer twice moved more towards the north and then shots were made at the new position of the wireless recorders while the streamer then kept fixed at its last position. This way wireless recorders were employed on both southern- and northern-ends of the profile.

Example field photos taken during the data acquisition (October 2015) from (a) the seismic landstreamer, and (b) the Bobcat-mounted drophammer (500 kg) used in combination with 75 wireless recorders. Fixed array geometry was used while recording the data along the streamer. The streamer then moved to a new position (200 m forward) with 40 m overlap from the previous position. Main portion of the profile was on forest’s gravel roads. Photos by Alireza Malehmir.
Wireless recorders were placed at every 10 m and partly overlapped the last position of the streamer on the northern side of the profile (Fig. 1). GPS times of the hits registered on the streamer data were used to extract the data from the wireless recorders operating in an autonomous mode during the whole survey. These data were then merged together and the three repeated shot records vertically stacked to improve the signal-to-noise ratio. To avoid a total failure, 23 explosive shots (charges ranging from 50–100 g) hand drilled into glacial tills down to 50–80 cm were also recorded in the middle of the profile. All receiver positions were surveyed using an accurate DGPS system to provide high-precision geodetic positioning. In the middle of the profile, accurate DGPS data could not be obtained because of the dense forests therefore some of the coordinates had to be interpolated thanks to the fixed and known spacing of the sensors in the streamer. For the quality control and further corrections, LiDAR elevation data publically available in Sweden were used. Overall we anticipate some inaccurate geodetic positioning on the order of 50 cm in some part of the profile. The whole data acquisition including mob/demob and geodetic surveying took 4 days. In total 533 shots and 90,587 traces (after the vertical stacking) were generated. Also in total, 1049 receiver locations/pegs (900 from the streamer, 75 wireless recorders south of the road and 74 recorders on the northern-end of the profile) were used. A nominal stacking fold of 40 was obtained when wireless data were also considered. Table 1 summarizes the main seismic data acquisition parameters.
The data processing followed a conventional poststack approach giving a focus to refraction static corrections, differentiating geophone data (to be in the acceleration domain as the MEMS data), coherent and random noise attenuation prior and after stacking, velocity analysis and NMO corrections. Figure 4 shows an example shot gather and how a shot fired near one of the wireless recorders on the northern part of the profile generated a strong reflection from the mineralization in the streamer data. The reflection is quite clear after a few processing steps.

(a) An example of a raw shot gather from a shot fired near one of the northern wireless stations and after (b) bandpass filtering, (c) refraction static corrections, and (d) spectral balancing and top mute. Note the reflection marked by the red arrow and interpreted to originate from the mineralization clearly recorded in the streamer sensors. This reflection stacked constructively and contributed to the image of the mineralization.
Results and Discussion
Figure 5a shows the six deep boreholes (those labelled with the exception of BB70-001 and BB73-001) downhole logged by Maries et al.16 and visualized in 3D. The two distinct sets of mineralized zones (hematite and magnetite) are evident from the density measurements on core samples from these holes. The deepest boreholes in the area (BB70–001 and BB73-001 in Fig. 5a) intersect the mineralization at about 850 m depth as indicated by the models of the ore bodies in Fig. 5b. Figure 5c shows the reflection seismic result (unmigrated) visualized in 3D with the known mineralized bodies. The most striking feature in the section is a set of high-amplitude reflections associated with the known mineralization. It is so noticeable and bright-spot looking that it cannot be anything than from the mineralization; it is also consistent with the logging data (Fig. 2) suggesting their high acoustic impedance contrast with their host rocks. Results are encouraging and suggest even a slightly deeper continuation of the mineralization from the known depth of 850 m. Given that the section is not migrated we provide information about the actual dip and position of the reflections when migrated using a constant velocity of 6000 m/s and its apparent dip of approximately 35°. When migrated, the reflections would have a dip of approximately 45° and would move up approximately to 900 m depth from the 1200 m depth observed in the unmigrated section18. It is however unclear why the mineralization stops and whether this is a problem of depth penetration or if it reflects the actual geology; an issue remained to be further investigated. The highly swampy and wetland of Blötberget also implies attenuative near-surface conditions requiring stronger sources, an issue that require a detailed investigation and comparison with conventional plant-type receivers and explosive sources.

(a) 3D visualization of some of the boreholes downhole logged prior to the seismic survey, (b) with the 3D models of the ore bodies, and (c) unmigrated reflection seismic section of a portion of the profile with the known ore bodies. A series of strong reflections associated with the mineralization is evident down to about 1200 m depth in the unmigrated section (we estimate this to migrate to 900 m depth after migration). It is unclear why the reflections stop at this depth and if this has any exploration or geological implications.
Nevertheless, this pilot seismic experiment and set-up appears to be sufficient for delineating such a type deposit and depth range. It is highly cost-effective (50% cheaper than convectional ones) and uses only an affordable and readily accessible seismic source; it does not require extensive reconnaissance and site planning. Only a minimum set-up was required to set up the drophammer as the seismic source and a minivan to place the acquisition system (for data quality checking). The streamer system has been used in various test sites in the Nordic countries but none of those studies, also those by others, have shown such a deep potential. This test therefore places its potential highly also for deep targeting (750–1000 m) as illustrated here. Future studies should aim at comparing the streamer data with conventional plant type sensors, checking the lateral extent of the mineralization and if the abrupt stop in the mineralization is due to geology or depth penetration problems.
References
Eaton, D., Milkereit, B. & Salisbury, M. Hardrock seismic exploration, SEG (2003).
Malehmir, A. et al. Campell, Seismic methods in mineral exploration and mine planning: a general overview of past and present case histories and a look into the future. Geophysics. 77, WC173–WC190 (2012).
Brodic, B. et al. Multicomponent broadband digital-based seismic landstreamer for near-surface applications. Journal of Applied Geophysics. 123, 227–241 (2015).
Malehmir, A. et al. Landstreamer seismics and physical property measurements in the Siilinjärvi open-pit apatite (phosphate) mine, central Finland. Geophysics 82, B29–B48 (2017a).
Eiken, O., Degutsch, M., Riste, P. & Rød, K. Snowstreamer: an efficient tool in seismic acquisition. First Break, 7(1223), doi:10.3997/1365–2397.1989021 (1989).
Pugin, A. J. M., Pullan, S. E. & Hunter, J. A. Multicomponent high-resolution seismic reflection profiling. The Leading Edge. 28(10), 1248–1261 (2009).
Pugin, A. J. M., Pullan, S. E., Hunter, J. A. & Oldenborger, G. A. Hydrogeological prospecting using P-and S-wave landstreamer seismic reflection methods. Near Surface Geophysics. 7(5–6), 315–327 (2009).
Miller, R., Pullan, S., Waldner, J. & Haeni, F. Field comparison of shallow seismic sources. Geophysics. 51(11), 2067–2092 (1986).
Dehgahnnejad, M., Malehmir, A., Svensson, M., Lindén, M. & Möller, H. High-resolution reflection seismic imaging for the planning of a double-train-track tunnel in the city of Varberg, southwest Sweden. Near Surface Geophysics. 15(3), 226–240 (2017).
Malehmir, A. et al. Planning of urban underground infrastructure using a broadband seismic landstreamer–Tomography results and uncertainty quantifications from a case study in southwest of Sweden. Geophysics. 80, B177–B192 (2015).
Inazaki, T. High-resolution seismic reflection surveying at paved areas using an S-wave type Land Streamer. Exploration Geophysics, 35, doi:10.1071/EG04001 (2004).
Krawczyk, C., Polom, U., Trabs, S. & Dahm, T. Sinkholes in the city of Hamburg – new urban shear-wave reflection seismic system enables high-resolution imaging of subrosion structures. J. Appl. Geophys. 78, 133–143, doi:10.1016/j.jappgeo.2011.02.003 (2012).
Brodic, B., A. Malehmir, A. & Juhlin, C. Delineating fracture zones using surface-tunnel-surface seismic data, P-S and S-P mode conversions. Journal of Geophysical Research, doi:10.1002/2017JB014304 (2017).
Malehmir, A. et al. Reflection seismic investigations in the Dannemora area, central Sweden: Insights into the geometry of polyphase deformation zones and magnetite-skarn deposits. Journal of Geophysical Research. 116, B11307 (2011).
Place, J. A. P. & Malehmir, A. Using supervirtual first arrivals in controlled-source hardrock seismic imaging–well worth the effort. Geophysical Journal International. 206, 716–730 (2016).
Maries, G., Malehmi, A. & Backstrom, E. Downhole physical properties measurements supporting iron-oxide deep exploration and mining in Blötberget, Sweden: Near Surface Geoscience, Geophysics on Mineral Exploration and Mining, Barcelona, Spain, September 2016, doi:10.3997/2214-4609.201602092 (2016).
Malehmir, A. et al. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: a case study from central Sweden. The Leading Edge, 36 (7), 552–557, doi:10.1190/tle36070308.1 (2017b).
Yilmaz, O. Seismic data analysis: Processing, inversion, and interpretation of seismic data. Tulsa, USA: Society of Exploration Geophysicists (1987).
Malehmir, A. et al. Delineating structures controlling sandstone-hosted base-metal deposits using high-resolution multicomponent seismic and radio-magnetotelluric methods: a case study from Northern Sweden. Geophysical Prospecting. 63, 774–797 (2015).
Acknowledgements
This study was carried out within the ERA-MIN 1 StartGeoDelineation project sponsored by Vinnova (project number 2014–06238), SGU, Tekes, Nordic Iron Ore AB, and Yara. G. Maries’ PhD study is sponsored by the project. We are grateful for all the supports provided by Nordic Iron Ore AB. We thank two anonymous reviewers with their constructive and useful comments.
Author information
Authors and Affiliations
Contributions
A.M. initiated the project; G.M. conducted the physical property measurements. A.M. processed the seismic data and prepared the figures. All authors were involved in the discussion of the results and writing of the manuscript.
Corresponding author
Ethics declarations
Competing Interests
The authors declare that they have no competing interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Malehmir, A., Maries, G., Bäckström, E. et al. Developing cost-effective seismic mineral exploration methods using a landstreamer and a drophammer. Sci Rep 7, 10325 (2017). https://doi.org/10.1038/s41598-017-10451-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-017-10451-6
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
