
Abstract
Atmospheric rivers (ARs) are narrow, elongated, synoptic jets of water vapor that play important roles in the global water cycle. The continually developing Tracking Atmospheric Rivers Globally as Elongated Targets (tARget) algorithm identifies AR objects at individual time steps based on thresholding integrated water vapor transport (IVT) and other requirements, and tracks each AR object in time and space. Building on previous versions of tARget, this paper discusses further refinements to the algorithm to better handle ARs in tropical and polar areas, as well as “zonal” ARs which the previous versions of the algorithm were not designed to capture. This further regionally refined algorithm is applied to the ERA5 reanalysis over 1940–2023 at 6 h intervals and a 0.25° × 0.25° horizontal resolution. The AR detection results are evaluated in terms of key AR characteristics. We anticipate this regionally refined global AR database will aid further understanding of ARs such as AR process studies, evaluation of AR simulations and predictions, and assessment of climate change impacts on ARs.
Similar content being viewed by others
Background & Summary
Influence of atmospheric rivers
Based on a brief record of atmospheric analysis data, the term “atmospheric river” (AR) was coined by Zhu and Newell1 to represent the relatively narrow filaments of horizontal water vapor transport that often occur within and across the midlatitudes. Their initial findings showed that while ARs on average only occupy about 10% of the Earth surface in the midlatitudes, they account for over 90% of the poleward transport of water vapor across those latitudes2. These characteristics indicate a critical role for ARs in shaping the global water and energy cycles, including their extremes.
Based on nearly three decades of research since the introduction of the concept, ARs have now been recognized as major precipitation deliverers, flood producers, and drought busters in a number of regions, and have been the focus of a rapidly increasing volume of studies in the recent few years3,4. For example, ARs on average account for 40% of the Sierra Nevada mountain snowpack5 – an essential source of water for California. On the other hand, almost all flood events on California’s Russian River are associated with ARs6. The global study of Paltan et al.7 highlights the role of ARs in water availability and floods in many parts of the world. The combination of beneficial and hazardous aspects of ARs underlies the introduction of the AR scale8 that aims to better characterize and communicate their impacts analogous to hurricane categories.
Numerous studies have put efforts into observing and understanding the characteristics and impacts of ARs near and at their landfall locations. Other studies have started to focus on the genesis and development of ARs on a global scale. Due to the lack of in situ observations, especially over regions away from AR landfalls, and the lack of information on vertical wind profiles from satellite observations, AR observational studies have largely relied on reanalysis products. These products routinely provide information on the vertical distribution of moisture and wind, from which a key AR variable is calculated – the vertically integrated water vapor transport (IVT). Because reanalysis products rely on a numerical weather prediction model to assimilate available observations, they are subject to errors and uncertainties of the underlying model. Evaluating the reanalysis-based results against direct observations, as done in this study, helps to understand these errors and uncertainties.
AR detection methods
Since the introduction of the rudimentary AR detection method by Zhu and Newell2 and especially during the recent five years or so, over 30 AR detection methods – largely complementary to one another and intended for different applications – have been developed in the community, many of which have been evaluated and intercompared under the Atmospheric River Tracking Method Intercomparison Project9,10,11,12 (ARTMIP). These methods vary in the geophysical variables used, and the requirements and thresholds applied to isolate ARs from background conditions. These methods can be grouped into three broad categories: (1) methods based on a single point, such as at AR landfall locations, to best take advantage of available in situ observation at those locations13,14; (2) methods based on a pre-determined cross-section, such as along coastal segments where ARs frequently make landfall15,16,17; and (3) methods based on all grid points of a region or the globe, to consider the full footprint and movement of each AR18,19,20.
Among the third type of methods, a widely used one is Tracking Atmospheric Rivers Globally as Elongated Targets (tARget). To facilitate a global perspective, the tARget algorithm adopts a broad definition for ARs, which does not pre-exclude any regions from AR detection. Similar “permissive” approaches have also been adopted in other algorithms for global or near-global studies of ARs (e.g., those intercompared in Lora et al.21). Since its introduction, the tARget algorithm has been continually developed and improved, with a major enhancement to enable the tracking of AR life cycles in the last version – version 322,23,24. The AR database based on this algorithm has been evaluated in a number of studies using dropsonde and satellite observations in terms of basic AR characteristics such as AR width, total IVT across the AR width, and the number of landfall dates, and has often been used as a benchmark in other studies25,26,27. It has been noted that AR characteristics may be sensitive to the AR detection method, including the resolution of the input data9,10,11,12,28. The tARget algorithm is found to be particularly robust to the input data (Figs. 3, 4 of Collow et al.12) – a desirable attribute in the context of method-related AR detection uncertainty.
Since its inception, the tARget algorithm – via its applicability across the globe – has provided a globally uniform approach to AR observational characterizations29,30,31,32,33, model evaluations34,35,36,37, and future projections38,39,40, including extending the consideration of ARs to a number of less-studied areas such as tropical, polar, inland, and east-coast areas41,42,43,44,45. The algorithm has even been extended for use in characterizing extreme aerosol transports – that is, aerosol atmospheric rivers46,47. The algorithm and the reanalysis-based global AR database have been used in over 100 studies so far. With the further refinements to the algorithm and details about the data record described herein, and the application to a high-resolution reanalysis product, it is our hope that the tARget algorithm/database will continue to provide a useful resource for global AR science and applications, such as further understanding of AR processes, evaluation of AR simulations and predictions, and assessment of climate change impacts on ARs.
Methods
tARget algorithm
The tARget algorithm comprises two major components: AR identification, and AR tracking. We refer to AR identification as methods for determining whether an AR condition is present in a given location at a given time (i.e., a Eulerian perspective), and AR tracking as methods to follow an AR in time and space over its life cycle (a Lagrangian perspective). Most of the existing AR detection methods are designed for AR identification – only a limited number of them are capable of tracking AR life cycles48,49,50. This tracking capability, along with the comprehensive recording of life cycle characteristics (lifetime, travel distance, etc.), is a key feature of the tARget AR database.
A simple method to identify ARs could be the use of a sole IVT threshold (“fixed threshold”) – a constant applied universally, such as that used by Ralph et al.8 in establishing the AR scale. While the simplicity can be useful for applications where information about AR geometry is not available or not an important consideration, a method based on a sole IVT threshold may have limitations in large-scale/global applications due to different IVT climatologies across regions. A more nuanced, time- and latitude-dependent IVT threshold (“relative threshold”) was used by Zhu and Newell2 to account for the varying background IVT across time and latitudes. Both fixed and relative thresholds have been used in different AR identification methods. The current AR database is based on a combination of semi-fixed (hemispherically constant but time dependent) and relative (both location- and time-dependent) IVT thresholds, along with other requirements as detailed below.
Our AR identification is based on further refining the tARget algorithm, bringing it to version 4 (hereafter, tARget version 4 or simply version 4). Here, we first describe all major steps in version 4, then point out the refinements compared to the previous version. Using zonal and meridional IVT from the ERA5 reanalysis51 as input, the algorithm considers a combination of intensity, geometry, and direction thresholds in identifying ARs, with the following major steps:
-
(1)
IVT objects (contiguous areas of connected pixels) are extracted based on IVT magnitude exceeding the location- and month-dependent 85th percentile threshold, IVTthreshold(x,y,m), where x and y are zonal and meridional coordinates of a pixel, and m is the month index that varies between 1 and 12. For each month, the percentile is calculated based on the five months centered on that month during 1980–2019. To facilitate AR identification in cold and/or dry regions where IVT is climatologically low, an additional, location-independent IVT threshold is applied hemispherically. This hemispheric IVT threshold is derived from the area-weighted spatial 5th percentile of the pixel-wise threshold, IVTthreshold(x,y,m), for each month and each hemisphere (see detailed discussion in the next section).
-
(2)
An object is retained if the standard deviation of IVT directions across individual pixels does not exceed 67.5°. This step serves to eliminate features with extremely incoherent IVT directions closely associated with tropical cyclones.
-
(3)
An object is retained if its axis has a contiguous segment or multiple such segments totalling longer than 1000 km where each pixel has a poleward IVT component greater than 25% of the total IVT at that pixel. This step aims to remove features with entirely zonally-directed or equatorward IVT primarily found in the tropics.
-
(4)
An object is retained if it is longer than 2000 km with a length-to-width ratio greater than 2. This step retains objects that are long and narrow, which are defining characteristics of ARs. The length and length-to-width ratio are calculated as in Guan and Waliser24.
IVT objects failing the geometrical and directional requirements in steps 2–4 are not immediately discarded. Instead, they are subject to additional iterations of steps 1–4 where each time the pixel-wise IVT threshold in step 1 will be raised by 2.5th percentile, up until the threshold reaches the 95th percentile. The additional iterations help to retain ARs where the surrounding object determined by the IVT 85th percentile threshold is not well-elongated, but a core region inside does satisfy the AR requirements, following a similar method used in Wick et al.18 and adopted in Guan et al.23,24. Note that even though some requirements in steps 1–4 target features mainly found in specific regions, all these requirements are applied globally, that is, without arbitrary specification of the domains where they apply.
The objects retained after steps 1–4 form the AR shapes. Once AR shapes at two adjacent time steps are obtained, a straightforward approach is used to track the movement of any given AR shape between the two time steps and construct AR life cycles. Two AR shapes, each from one of the two time steps, that spatially overlap are regarded to belong to the same life cycle. This presumes the temporal sampling interval (here, 6 h) is short enough relative to the typical AR size and travel speed such that AR shapes belonging to the same life cycle can be expected to overlap between any two adjacent time steps. In this approach, the specification of an arbitrary search radius is unnecessary as the AR shape boundary naturally serves that purpose. For a given AR life cycle, the first time step is regarded as the genesis, and the last time step the termination, and life cycle characteristics (such as lifetime and travel distance) are calculated based on that. When separation occurs, that is, when one AR shape from the previous time step overlaps with multiple AR shapes at the current time step, only one of the AR shapes at the current step that is most morphologically similar to the AR shape from the previous step is deemed continuation of the existing AR life cycle, and the remaining AR shapes at the current time step are each deemed genesis of a new life cycle. The mirroring case, AR merger, is handled in an opposite manner. A summary of the AR identification and tracking steps described above for tARget version 4 is shown in Fig. 1.

Flowchart of tARget version 4. The shaded backgrounds in light gray and light blue indicate the identification and tracking components of the algorithm, respectively. In the gray background area, white texts on a colored background indicate the refinements in version 4 (see text for details). In the blue background area, the five possible overlapping relationships between AR shapes at time steps t−1 and t are schematically shown, where each solid oval represents an AR shape at t, and the dashed ovals project AR shapes from t−1 to t. Note not all the cases have both solid and dashed ovals. For example, the genesis case only has a solid oval at t, and the termination case only has a dashed oval at t−1 (bottom left two squares). Green ovals indicate genesis as a result of separation, or termination as a result of merger. Updated from Guan and Waliser24.
Refinements in version 4
Tropical refinement
In previous versions, non-AR tropical features are filtered out based on two requirements: (a) An IVT object is retained only if more than half of the pixels within the object have an IVT direction within 45° from the object-mean IVT, to filter out features related to tropical cyclones where a range of different and contrasting IVT directions can be found within the same object; (b) An IVT object is retained only if the object-mean IVT has a poleward component greater than 50 kg m−1 s−1, to filter out features related to tropical convection with primarily zonally directed IVT. In version 4, requirement (a) is replaced with the one described in step 2 above based on the standard deviation of IVT directions across individual pixels being less than 67.5° (white text on red background in Fig. 1). IVT directions are weighted by IVT magnitude and the area of individual pixels for calculating the directional standard deviation. The threshold of 67.5° is chosen such that the revised filter leads to negligible changes in climatological AR frequency (more discussion later). Compared to the previous version where pixels with an IVT direction more than 45° from the object-mean IVT are regarded as equally bad, the revised filter allows pixels with larger directional differences from the object-mean IVT to be penalized more, as is desired. In the Southern Hemisphere, the updated filter has an improved performance, where only a small or negligible fraction (<3%) of the detected ARs are potentially mis-labelled tropical cyclones (Fig. 2) – that is, it keeps tropical cyclones from a great majority of the resulting ARs in the main development region (around 15°S). In the Northern Hemisphere, the previous and new versions of the filter have nearly identical performances. In version 4, requirement (b) is replaced with the one described next in extratropical refinement. That is, even though requirement (b) is to filter features mainly found in the tropics, the refinement to it aims to improve AR detection in the extratropics. As noted earlier, all requirements in tARget are applied globally, even though some of them primarily target features found in specific regions.

Performance of tropical cyclone filtering in two versions of the tARget algorithm. Shown is the fraction (%) of ARs with a tropical cyclone center located within the AR shape boundary as a function of latitudes. Previous version (gray) refers to version 3, and new version (black) is version 4. See Methods for details. Tropical cyclone center locations are from IBTrACS version 473. Based on a coarsened (1.5° × 1.5°) version of ERA5 over 1980–2019.
Extratropical refinement
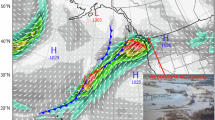
In the extratropics, certain ARs with a largely zonal orientation have been observed52, but so far have not been systematically studied. Due to their zonal orientation, the mean meridional IVT could be only weakly poleward or even equatorward for these ARs, which may therefore be inadvertently removed by requirement (b) described above. Forgoing the poleward requirement entirely is not desirable, as that would lead to numerous non-AR tropical features to be retained. By specifying the poleward requirement based on segments of the AR axis (can be located anywhere on the AR axis as long as the combined length of these segments is above 1000 km) rather than the whole AR, the refined filter described in step 3 above removes features with entirely zonal or equatorward IVT and meanwhile accommodates “zonal” ARs where a large portion of the AR may appear zonal, but still with coherent poleward IVT in certain sectors of the AR (white text on green background in Fig. 1). Examples of “zonal” ARs retained in version 4 of tARget but discarded in the previous version are shown in Fig. 3.

Examples of “zonal” ARs detected by tARget version 4 but undetected by the previous version. In each panel, the green contour shows the AR shape, the white/blue line shows the AR axis – blue if IVT at the given pixel has a poleward component greater than 25% of the total IVT there, and white otherwise. Shading shows IVT magnitude (kg m−1 s−1), and arrows show vector IVT where the magnitude exceeds 200 kg m−1 s−1. The mean meridional IVT within the whole AR is indicated in the bottom-right of each panel.
Polar refinement
In step 1 described above, the hemispheric IVT threshold applied on top of the pixel-wise IVT threshold effectively increases the pixel-wise threshold to higher percentiles in cold/dry regions, and serves to remove spurious features in those regions that are strong enough to pass the local 85th percentile, but are nonetheless weak in terms of absolute magnitude and therefore not of practical interest. In previous versions of the tARget algorithm, a fixed lower limit of 100 kg m−1 s−1 for IVT was used to serve a similar purpose. The more nuanced specification of this lower limit in version 4, i.e., making the threshold month- and hemisphere-dependent, better aligns the tARget algorithm with polar-specific algorithms in polar regions (white text on blue background in Fig. 1). Specifying this lower limit based on the area-weighted spatial 5th percentile of IVTthreshold(x,y,m), as explained earlier, rather than an absolute value of 100 kg m−1 s−1 will also be useful in cases where the input IVT data are systematically biased, or where the input data are not IVT at all. By definition, the hemispheric IVT threshold raises the pixel-wise threshold to higher percentiles over 5% of the surface area of the corresponding hemisphere where IVT is climatologically the lowest. To illustrate, Fig. 4 shows the pixel-wise IVT threshold (top row) which remains the same as in the previous version, the hemispheric IVT threshold (middle row) which is refined from the previous version, and for reference, the local temporal percentile corresponding to the refined hemispheric IVT threshold, for two example months. In polar areas, the hemispheric threshold is equivalent to the local 95th percentile or above (Fig. 4, bottom). Similarly high (98th) IVT percentile threshold was used in an Antarctic AR detection algorithm53. The absolute value of the hemispheric IVT threshold is ~50 kg m−1 s−1 in austral summer (Fig. 4, middle left), which is much smaller than the threshold of ~110 kg m−1 s−1 in boreal summer (Fig. 4, middle right), consistent with the smaller IVT threshold (50, as opposed to 150 kg m−1 s−1) used in the application of a polar-specific AR detection algorithm in Antarctica54 compared to the application of the same algorithm in the Arctic55 during their respective melt seasons. Compared to 100 kg m−1 s−1 used in the previous version, the refined hemispheric threshold has a smaller absolute value except in boreal summer (May–September), as shown in the examples in Fig. 4 (middle). As a result, the AR shapes from version 4 extend further inland in all months in Antarctica and winter in Greenland, but less inland during summers in Greenland, as shown by the examples in Fig. 5. The polar refinement of the global algorithm may better facilitate examination of the excursion of lower-latitude ARs into polar regions – a topic with increasing scientific attention due to the influence of ARs on poleward moisture and heat transport and associated extreme snow accumulation and melt events (e.g., Gorodetskaya et al.56, Neff et al.57, and many studies thereafter).

Monthly IVT thresholds used for AR detection in tARget version 4 for two example months. (top) Pixel-wise thresholds (kg m−1 s−1) based on the 85th percentile of IVT. This is the same as in the previous version. (middle) Hemispheric thresholds (kg m−1 s−1) based on the area-weighted spatial 5th percentile of the values shown in the top row, calculated separately for the two hemispheres. The exact values of the thresholds are indicated in the top- and bottom-left of each panel. This is a refinement in version 4 compared to the fixed lower limit of 100 kg m−1 s−1 used in the previous version. (bottom) The local temporal percentiles corresponding to the refined hemispheric thresholds shown in the middle row, for reference.

Examples of AR shapes in polar regions from two versions of the tARget algorithm. In each panel, the green contour shows the AR shape from version 4, whereas the blue contour shows the previous version (hidden by the green contour where the two versions overlap). Shading shows IVT magnitude (kg m−1 s−1).
Comparison of AR detection result with previous version
The refinements described above did not change the overall pattern of AR frequency distributions (Fig. 6). Compared to the previous version (Fig. 6e), the tropical refinement resulted in negligible changes in the climatological AR frequency (Fig. 6f). The extratropical refinement led to a global mean increase of 0.08% (based on absolute difference, not relative) in AR frequency (Fig. 6g), consistent with the detection of “zonal” ARs that went undetected in the previous version as shown by the examples in Fig. 3. Regions with increased AR frequencies include the Arctic Ocean and a number of coastal and land areas in both hemispheres. The presence of “zonal” ARs in the Arctic was noted by Mattingly et al.55, who removed the poleward IVT requirement entirely in their AR detection north of 70°N. Regions with reduced AR frequencies are also noted with the extratropical refinement. Larger changes occur with the polar refinement, especially in West Antarctica and coastal East Antarctica (Fig. 6h), consistent with the further inland extension of the AR shape boundaries as shown by the examples in Fig. 5. Interestingly, the polar refinement also resulted in notable increase in AR frequency around the Atacama Desert, the driest nonpolar desert in the world, where AR-like structure has been observed58. When combined, the three refinements resulted in a global mean increase of AR frequency from 6.15% to 6.44% (Fig. 6d).

Comparison of climatological AR frequency between refined and previous versions of tARget. The left column shows the AR frequency (%) from five experiments: tropical refinement, extratropical refinement, polar refinement, all refinements combined, and the previous version. The right column shows the absolute difference in AR frequency between each of the refined versions and the previous version – note the shading threshold is 0.1% while shading intervals are 0.5%. In all panels, the number in the bottom-right corner shows the global mean. Based on a coarsened (1.5° × 1.5°) version of ERA5 over 1980–2019.
Data Records
The global AR database59 based on applying tARget version 4 on the ERA5 reanalysis covers the period of 1940–2023 at 6 h intervals with a horizontal resolution of 0.25° × 0.25°, and is part of the Global Atmospheric Rivers Dataverse60,61,62,63 (https://dataverse.ucla.edu/dataverse/ar). The algorithm was run on ERA5 data resampled to 6 h intervals to conserve computational and storage resources. The 6 h input data resolution is adequate for AR tracking using the spatial overlapping method, as discussed earlier. The sensitivity analysis in Guan and Waliser22 (their Fig. 5) indicated that the tARget algorithm is insensitive to the temporal resolution of the input data, but sensitive to the horizontal resolution. Therefore, the native ERA5 horizontal resolution is maintained. The output is stored in a single netCDF file with necessary metadata, and can be readily ingested into common analysis software and programming languages. Selected examples of the different types of variables are listed in Table 1. The full list of variables and related information are part of the metadata of the AR database contained in the self-descriptive netCDF file.
Variables with names ending in “map” (hereafter, map variables) provide pixel-wise information about ARs at each time step (such as “shapemap” for maps of AR shape ID) and are on the same grid as the input IVT data, with the following five dimensions: (1) The first dimension (“lon”) represents longitude, going eastward from 0 to 359.75°; (2) The second dimension (“lat”) represents latitude, going southward from 90 to −90° following the ERA5 convention; (3) The third dimension (“lev”) is redundant, and reserved for future use; (4) The fourth dimension (“time”) gives temporal information, including the calendar used (Gregorian in this database); (5) The fifth dimension (“ens”) is redundant and reserved for future use.
Variables with names not ending in “map” (hereafter, attribute variables) provide the attributes of each AR object. The “lon” (if existing) and “lat” dimensions of these variables are fictitious and have specific interpretations as described here. AR attributes that are a single number (such as AR length, named “length”) have four dimensions, with the first dimension (“lat”) representing the index of the AR object that goes from 1 to the total number of AR objects at a given time step, and the rest 3 dimensions (“lev”, “time”, “ens”) as described earlier. AR attributes that are an array (such as longitudes and latitudes of the smoothed AR axis, named “axislon” and “axislat”) have five dimensions, with the first dimension (“lon”) representing the index of the array that goes from 1 to the total number of elements in that array, and the rest 4 dimensions (“lat”, “lev”, “time”, “ens”) as described above. The leading dimensions of the attribute variables are fictitiously named “lon” and “lat” to facilitate automatic ingestion into software that can only recognize certain dimension names due to the netCDF convention used in those software.
The data are stored with the following structure: For a given AR object at a given time step with a shape ID of n (indicating the nth object at that time step), the corresponding map variable (“shapemap”) is formed by populating the number n to all pixels belonging to that AR object, with pixels not within any ARs assigned missing values (NaN). Other map variables are stored similarly. For AR axis (“axismap”), for example, the value n is populated to all pixels belonging to the AR axis, and missing values are filled in elsewhere within the AR footprint. For AR attributes that are a single number, such as AR length (“length”), the values are stored as the nth element along the “lat” dimension in the corresponding attribute variables. For AR attributes that are an array, such as longitudes and latitudes of the smoothed AR axis (“axislon” and “axislat”), the values are stored as the nth array along the “lat” dimension in the corresponding attribute variables.
Among all variables described above, those beginning with the letter ‘k’ are track-related (such as “klifetime” for AR lifetime). In most cases, these variables repeat the same value (such as a value of 259,200 for AR lifetime in seconds) over all time steps belonging to the specific AR life cycle. The only exceptions are the instantaneous travel velocity and track status, whose values are specific to each time step. Each AR life cycle is assigned a track ID (named “kid”) unique within the entire database. The track ID is in the format of YYYYMMDDHHID, where YYYY is year, MM is month, DD is day, HH is hour, and ID is the AR shape ID, each with the implied number of digits. By following a specific track ID in time, the entire life cycle of an AR can be followed. The status of each time step within an AR life cycle (named “kstatus”) is recorded in the format of XYZ, where X is 0 or 1 indicating whether separation occurred, Y is the same but for merger, and Z is 1 for genesis, 3 for termination, and 2 otherwise (Z is 0 for single-step AR life cycles).
Technical Validation
Comparison of key AR characteristics with Zhu and Newell’s early studies
The first validation analysis here evaluates whether the fundamental characteristics (narrowness and magnitude of poleward moisture transport) of the ARs from the new database are consistent with the ARs studied by Zhu and Newell1,2, who coined the term “atmospheric river”. Based on three years of analysis data and a formulation to extract ARs without explicit consideration of AR geometry, Zhu and Newell2 found that ARs account for over 90% of the poleward moisture transport across the midlatitudes while occupying only about 10% of the Earth surface in those latitudes. Based on the new database, ARs account for 83% (85%) of the total meridional IVT, and 9% (10%) of the zonal circumference, between 30 and 60° in the Northern (Southern) Hemisphere (Fig. 7). The AR narrowness, including the hemispheric difference, matches Zhu and Newell2 (their Fig. 6) very well. In both hemispheres, the AR fractional IVT is slightly lower than indicated in Zhu and Newell2, which could be related to differences in the data sources, analysis periods, as well as the additional constraints on AR geometry in the tARget algorithm.

Key characteristics of ARs in ERA5. (a) Zonally-integrated meridional IVT (kg s−1) associated with ARs (green), not associated with ARs (red), and their combination (black). (b) Integrated AR zonal scale expressed as the fraction of the total zonal circumference at each latitude.
Comparison of AR landfall dates with region-specific algorithms
The new AR database is further assessed by comparing landfall dates to three previous studies independently conducted for three regions: western North America64, Britain15, and East Antarctica56 (Table 2). A similar comparison with these studies was conducted in Guan and Waliser22 to assess the performance of the original version of the global AR database. Different variables and thresholds (3rd and 4th rows) were used for AR detection in these studies to suit the specific applications in those regions. Note that AR landfall dates reported in the latter two studies are only those associated with extreme hydrological events and are therefore less frequent than in the first study (5th row). We compare the total number of AR landfall dates for each location reported in the three studies to the subset of those dates that have a corresponding landfall from the new database within ± 1 day in the same region, and calculate the ratio between the two counts as a measure of agreement. The 1-day offset accommodates possible timing difference in AR landfalls as a result of differences in data and methods. The percent agreement between AR landfalls from the new database and from those previous studies is 99%, 94%, and 100% for western North America, Britain, and East Antarctica, respectively (bottom row). The comparison to these independent studies and AR detection techniques suggests the new AR database has a reasonable performance across regions with different climatologies.
Comparison of AR width and total IVT with dropsonde observations
In the above, we have evaluated the narrowness of ARs represented in the new database based on an aggregate metric, that is, the fraction of total zonal circumference accounted for by all ARs at a given latitude. Here, we further evaluate the narrowness of ARs by explicitly comparing the width of individual ARs to dropsonde observations, and while doing so, evaluate the total IVT (TIVT) across the AR width – a useful AR metric implicated in Zhu and Newell2 and formally defined in Ralph et al.65. The AR width (“width2”) evaluated here represents the width of the transect that goes through the AR centroid in a direction perpendicular to the mean AR IVT. This is different from the other metric of AR width (“width”) also recorded in the database, which is simply the ratio between the area of an AR and its length, that is, the effective width. The centroid-based AR width, rather than the effective AR width, is evaluated here because it is more consistent with the way ARs are observed by dropsondes, i.e., along transects across the ARs that attempt to sample the center part of ARs65. Defined as the integration of the IVT component perpendicular to the transect that defines the AR width, TIVT (“tivt”) is analogous to the streamflow in a terrestrial river. Both the AR width and TIVT are part of the AR attributes recorded in the tARget database.
The evaluation here follows similar procedures used in Guan et al.23 to evaluate the second version of the AR database. Based on the time and location of the 21 dropsonde-observed AR transects reported in Ralph et al.65, we identified 20 corresponding ARs from the ERA5 reanalysis based on searching the 6-h step of ERA5 that has an AR in the vicinity of the dropsonde transect and closest in time to the mid-point of the transect (Fig. 8) – two of the dropsonde transects (#18 and #19) were close enough in time to correspond to the same reanalysis time step. Despite the limited number, a variety of ARs are sampled, such as landfalling versus offshore, subtropical versus midlatitude, and long-and-narrow versus less well elongated. Nineteen out of the 21 dropsonde transects have a matching reanalysis AR within ± 3 hours, that is, within the temporal resolution of the AR database. The other two dropsonde transects have a matching reanalysis AR 24.6 and 9.7 h earlier, respectively. In 11 cases, the dropsonde and reanalysis transects are spatially close to each other. The location difference in other cases is partly attributable to difference in data and methods used for AR detection, but also the timing difference between dropsonde and reanalysis, during which an AR can propagate in space and/or change in structure.

The 20 ERA5 reanalysis ARs corresponding to 21 ARs transected by dropsondes. The numbering of the transect in the top-left of each panel is as in Ralph et al.65. Shown is the 6-h time step – also indicated in the top-left of each panel – of the reanalysis AR (shading: IVT magnitude, kg m−1 s−1; red: transect) closest in time to the mid-point of the dropsonde transect (blue). Two of the 21 dropsonde transects (#18 and #19) correspond to the same 6-h step of the reanalysis AR (3rd panel in the last column). Indicated in the bottom-right of each panel is the time difference (h) between the closest 6-h step of the reanalysis and the mid-point of the dropsonde transect (as a nominal observational time), where positive/negative signs represent that the reanalysis lags/leads the observation.
We now quantitatively compare AR width and TIVT between dropsonde observations and the ERA5 reanalysis. In Fig. 9, each circle represents one pair of dropsonde and reanalysis transects (see Fig. 8, blue and red). Note that while the reanalysis AR width is based on the IVT 85th percentile, the dropsonde AR width is based on a fixed IVT threshold of 250 kg m−1 s−1. The two sets of AR widths are correlated with a correlation coefficient of 0.66 (p = 0.001) (Fig. 9a). The blue and red error bars indicate one standard deviation below/above the mean (where the two error bars cross). The reanalysis- and dropsonde-based results have similar standard deviations, but reanalysis exhibits a bias of −13.5% in mean AR width (see also Fig. 9c). A comparison to the similar analysis in Guan et al.23 but based on the coarser-resolution predecessor of ERA5, where a bias of −2% is found, suggests the width of detected ARs is somewhat sensitive to the horizontal resolution of the input data, with higher resolution leading to narrower ARs – consistent with the sensitivity test in Guan and Waliser22 (their Fig. 5l). The agreement between dropsondes and reanalysis is better for TIVT, with a stronger correlation coefficient of 0.86 (p < 0.001), and largely matching means and standard deviations. The better agreement for TIVT compared to AR width regardless of the input data for AR detection (comparing to Guan et al.23) suggests TIVT is a more robust AR metric. This is attributable to the integration being dominated by strong IVT values toward the AR center and therefore insensitive to small errors in the detected AR width.

Comparison of ARs between dropsonde observations and the ERA5 reanalysis. (a) AR width (km). See Fig. 8 for the time and location of each transect. The three cases with the best space-time coincidence between dropsonde and reanalysis AR transects (#5, #8, and #12 in Fig. 8) are shown in green. Blue and red error bars indicate one standard deviation below/above the mean (where the two error bars cross). (b) As (a) but for TIVT (108 kg s−1). (c) Histogram of AR width (km) based on all reanalysis ARs detected over the northeastern Pacific (AR centroids within 163.4–124.6°W, 23–46.4°N) during 15 January to 25 March of 1940–2023 (gray bars). Also shown are the mean AR width (km) based on all reanalysis ARs (red solid), the subset that corresponds to the 21 dropsonde transects (red dashed), and the 21 dropsonde transects themselves (blue dashed for the mean, and blue circles for individual transects). The mean AR width is also indicated in the figure legend for each set. Red shading indicates the 95% confidence interval of the mean reanalysis AR width for a random 21-member sample drawn from the pool of all reanalysis ARs based on 10,000 iterations. The error bar centered on the blue dashed line indicates the 95% confidence interval of the difference between the blue and red dashed lines based on a two-tailed, paired t-test. (d) As (c) but for TIVT (108 kg s−1).
The three cases with the best space-time coincidence between dropsonde and reanalysis AR transects (green circles in Fig. 9a,b; see #5, #8, and #12 in Fig. 8) are among the cases, but not the only cases, with the best agreement in AR width and TIVT (i.e., circles located close to the 1:1 line). This is expected as the degree of agreement is affected, but not solely determined, by the space-time coincidence, because the dropsonde observation and the reanalysis each independently aims to transect the most influential part of the AR based on where they respectively identify that part to be. As such, the object-level error statistics discussed above for AR width and TIVT – accommodating reasonable mismatch in time and space between objects – should not be directly translated to reanalysis errors in the regular sense.
In the above, we evaluated the agreement in AR statistics between ARs matched in dropsonde observations and the reanalysis. Next, we further assess if AR statistics based on the 21 dropsonde-observed ARs are consistent with a random sample from the full population of ARs represented in the reanalysis. To facilitate comparisons, we extracted ARs detected in the northeastern Pacific (AR centroids within 163.4–124.6°W, 23–46.4°N) during 15 January to 25 March of 1940–2023. The domain and the combination of days selected are just enough to encompass the location and time of the 21 dropsonde-observed ARs. Both AR width and TIVT are characteristic of a log-normal distribution with a longer right tail based on the total of >12,000 reanalysis ARs selected (Fig. 9c,d, gray). As already discussed above, mean AR width in the reanalysis exhibits a negative bias, while mean AR TIVT well matches dropsonde observations (Fig. 9c,d, comparing red and blue dashed lines). Sampling variations in mean AR width and TIVT are obtained based on randomly selecting 21 ARs from the pool of all reanalysis ARs, repeating for 10,000 times, and finding the 2.5th and 97.5th percentiles of the resulting empirical distributions (Fig. 9c,d, red shading). For AR width (Fig. 9c), the dropsonde-mean (blue dashed) is within the sampling variations of the reanalysis but close to the upper bound (right edge of red shading). For TIVT (Fig. 9d), the dropsonde-mean is well within the sampling variations of the reanalysis. The result supports that the 21 dropsonde-observed ARs are consistent with a random sample of the same size from the full population of northeastern Pacific ARs in terms of key AR characteristics such as width and TIVT.
Comparison of AR durations with ground observations from an AR observatory
Finally, we evaluate mean duration of the reanalysis ARs against ground observations. AR event duration is based on counting the number of hours AR conditions are continuously met at a given location – that is, a Eulerian perspective. Using hourly observations from an AR observatory at Bodega Bay, California during 2004–2015, Ralph et al.66 defined AR events to be when (1) the integrated water vapor (IWV) exceeds 20 mm, (2) the IWV flux exceeds 200 mm m s−1, and (3) the two conditions are simultaneously met for at least 12 consecutive hours. The mean duration for a total of 114 AR events thus defined is 24 h (Fig. 10, right bar).

Mean AR duration (h) based on three sets of ARs at Bodega Bay, California. The left bar is based on ARs over the full period of the ERA5 reanalysis for the grid cell that contains the observational site, the center bar is the same except based on the overlapping period with observations, and the right bar is based on observations from an AR observatory at Bodega Bay, California during 2004–201566. The red error bars indicate the 95% confidence interval for the reanalysis ARs.
Based on reanalysis ARs detected at the grid cell containing the Bodega Bay station over the entire period of 1940–2023, the mean AR duration is 24 h – counting only those ARs with durations of at least 12 h, to match the threshold used in the observational reference. The mean AR duration based on the overlapping period with the observations is 25 h. In either case, the 95% confidence interval encompasses the mean observed value, suggesting that the reanalysis ARs are non-biased relative to the observed in terms of event duration – an AR metric closely related to AR impacts8,33,67,68.
Usage Notes
Using the AR database, a variety of AR statistics can be derived. Only a few examples are given here. Climatological AR frequency at a given grid cell can be calculated as the ratio between the number of time steps when the AR shape ID (variable “shapemap”) is non-NaN and the total number of time steps over the analysis period. AR IVT at each grid cell can be obtained by masking the raw IVT based on whether the AR shape ID is NaN (note the variables “ivtx” and “ivty” included in the database are for object-mean IVT, not IVT at individual grid cells). Using the masked IVT, climatological AR IVT at each grid cell can then be obtained by averaging over non-NaN values. AR genesis and termination frequencies at each grid cell can be obtained by counting the number of time steps at which the last digit of track status (variable “kstatusmap”) is 1 (for genesis) or 3 (for termination). AR track frequency at each grid cell can be obtained by counting the number of unique track IDs (variable “kidmap”). A mix of GrADS and MATLAB codes for calculating a suite of 17 AR metrics are available69. In addition to enabling the analysis of long-term AR variability and trends, the database is expected to be extended in time annually to facilitate the analysis of the latest events of interest.
Code availability
The AR detection algorithm, tARget version 470, is available via the Global Atmospheric Rivers Dataverse (https://dataverse.ucla.edu/dataverse/ar).
References
Zhu, Y. & Newell, R. E. Atmospheric rivers and bombs. Geophysical Research Letters 21, 1999–2002 (1994).
Zhu, Y. & Newell, R. E. A Proposed Algorithm for Moisture Fluxes from Atmospheric Rivers. Monthly Weather Review 126, 725–735 (1998).
Ralph, F. M. et al. Atmospheric Rivers Emerge as a Global Science and Applications Focus. Bulletin of the American Meteorological Society 98, 1969–1973 (2017).
Ralph, F. M. et al. (eds) Atmospheric Rivers (Springer Cham, 2020).
Guan, B., Molotch, N. P., Waliser, D. E., Fetzer, E. J. & Neiman, P. J. Extreme snowfall events linked to atmospheric rivers and surface air temperature via satellite measurements. Geophysical Research Letters 37, 2010GL044696 (2010).
Ralph, F. M. et al. Flooding on California’s Russian River: Role of atmospheric rivers. Geophysical Research Letters 33, 2006GL026689 (2006).
Paltan, H. et al. Global Floods and Water Availability Driven by Atmospheric Rivers. Geophysical Research Letters 44, (2017).
Ralph, F. M. et al. A Scale to Characterize the Strength and Impacts of Atmospheric Rivers. Bulletin of the American Meteorological Society 100, 269–289 (2019).
Shields, C. A. et al. Atmospheric River Tracking Method Intercomparison Project (ARTMIP): project goals and experimental design. Geoscientific Model Development 11, 2455–2474 (2018).
Rutz, J. J. et al. The Atmospheric River Tracking Method Intercomparison Project (ARTMIP): Quantifying Uncertainties in Atmospheric River Climatology. Journal of Geophysical Research: Atmospheres 124, 13777–13802 (2019).
O’Brien, T. A. et al. Increases in Future AR Count and Size: Overview of the ARTMIP Tier 2 CMIP5/6 Experiment. Journal of Geophysical Research: Atmospheres 127, e2021JD036013 (2022).
Collow, A. B. M. et al. An Overview of ARTMIP’s Tier 2 Reanalysis Intercomparison: Uncertainty in the Detection of Atmospheric Rivers and Their Associated Precipitation. Journal of Geophysical Research: Atmospheres 127, e2021JD036155 (2022).
Neiman, P. J., White, A. B., Ralph, F. M., Gottas, D. J. & Gutman, S. I. A water vapour flux tool for precipitation forecasting. Proceedings of the Institution of Civil Engineers - Water Management 162, 83–94 (2009).
Ralph, F. M., Coleman, T., Neiman, P. J., Zamora, R. J. & Dettinger, M. D. Observed Impacts of Duration and Seasonality of Atmospheric-River Landfalls on Soil Moisture and Runoff in Coastal Northern California. Journal of Hydrometeorology 14, 443–459 (2013).
Lavers, D. A. et al. Winter floods in Britain are connected to atmospheric rivers. Geophysical Research Letters 38, L23803 (2011).
Gao, Y. et al. Dynamical and thermodynamical modulations on future changes of landfalling atmospheric rivers over western North America. Geophysical Research Letters 42, 7179–7186 (2015).
Ramos, A. M. et al. Atmospheric rivers moisture sources from a Lagrangian perspective. Earth System Dynamics 7, 371–384 (2016).
Wick, G. A., Neiman, P. J. & Ralph, F. M. Description and Validation of an Automated Objective Technique for Identification and Characterization of the Integrated Water Vapor Signature of Atmospheric Rivers. IEEE Transactions on Geoscience and Remote Sensing 51, 2166–2176 (2013).
Rutz, J. J., Steenburgh, W. J. & Ralph, F. M. Climatological Characteristics of Atmospheric Rivers and Their Inland Penetration over the Western United States. Monthly Weather Review 142, 905–921 (2014).
Mundhenk, B. D., Barnes, E. A. & Maloney, E. D. All-Season Climatology and Variability of Atmospheric River Frequencies over the North Pacific. Journal of Climate 29, 4885–4903 (2016).
Lora, J. M., Shields, C. A. & Rutz, J. J. Consensus and Disagreement in Atmospheric River Detection: ARTMIP Global Catalogues. Geophysical Research Letters 47, e2020GL089302 (2020).
Guan, B. & Waliser, D. E. Detection of atmospheric rivers: Evaluation and application of an algorithm for global studies. Journal of Geophysical Research: Atmospheres 120, 12514–12535 (2015).
Guan, B., Waliser, D. E. & Ralph, F. M. An Intercomparison between Reanalysis and Dropsonde Observations of the Total Water Vapor Transport in Individual Atmospheric Rivers. Journal of Hydrometeorology 19, 321–337 (2018).
Guan, B. & Waliser, D. E. Tracking Atmospheric Rivers Globally: Spatial Distributions and Temporal Evolution of Life Cycle Characteristics. Journal of Geophysical Research: Atmospheres 124, 12523–12552 (2019).
Yang, Y., Zhao, T., Ni, G. & Sun, T. Atmospheric rivers over the Bay of Bengal lead to northern Indian extreme rainfall. International Journal of Climatology 38, 1010–1021 (2018).
Eiras-Barca, J. et al. The concurrence of atmospheric rivers and explosive cyclogenesis in the North Atlantic and North Pacific basins. Earth System Dynamics 9, 91–102 (2018).
Lakshmi, D. D., Satyanarayana, A. N. V. & Chakraborty, A. Assessment of heavy precipitation events associated with floods due to strong moisture transport during summer monsoon over India. Journal of Atmospheric and Solar-Terrestrial Physics 189, 123–140 (2019).
Shields, C. A. et al. Future Atmospheric Rivers and Impacts on Precipitation: Overview of the ARTMIP Tier 2 High‐Resolution Global Warming Experiment. Geophysical Research Letters 50, e2022GL102091 (2023).
Waliser, D. & Guan, B. Extreme winds and precipitation during landfall of atmospheric rivers. Nature Geoscience 10, 179–183 (2017).
Nash, D., Waliser, D., Guan, B., Ye, H. & Ralph, F. M. The Role of Atmospheric Rivers in Extratropical and Polar Hydroclimate. Journal of Geophysical Research: Atmospheres 123, 6804–6821 (2018).
Arabzadeh, A., Ehsani, M. R., Guan, B., Heflin, S. & Behrangi, A. Global Intercomparison of Atmospheric Rivers Precipitation in Remote Sensing and Reanalysis Products. Journal of Geophysical Research: Atmospheres 125, e2020JD033021 (2020).
Ma, W., Chen, G. & Guan, B. Poleward Shift of Atmospheric Rivers in the Southern Hemisphere in Recent Decades. Geophysical Research Letters 47, e2020GL089934 (2020).
Guan, B., Waliser, D. E. & Ralph, F. M. Global Application of the Atmospheric River Scale. Journal of Geophysical Research: Atmospheres 128, e2022JD037180 (2023).
Guan, B. & Waliser, D. E. Atmospheric rivers in 20 year weather and climate simulations: A multimodel, global evaluation. Journal of Geophysical Research: Atmospheres 122, 5556–5581 (2017).
DeFlorio, M. J. et al. Global Assessment of Atmospheric River Prediction Skill. Journal of Hydrometeorology 19, 409–426 (2018).
DeFlorio, M. J., Waliser, D. E., Guan, B., Ralph, F. M. & Vitart, F. Global evaluation of atmospheric river subseasonal prediction skill. Climate Dynamics 52, 3039–3060 (2019).
Kim, S., Leung, L. R., Guan, B. & Chiang, J. C. H. Atmospheric river representation in the Energy Exascale Earth System Model (E3SM) version 1.0. Geoscientific Model Development 15, 5461–5480 (2022).
Espinoza, V., Waliser, D. E., Guan, B., Lavers, D. A. & Ralph, F. M. Global Analysis of Climate Change Projection Effects on Atmospheric Rivers. Geophysical Research Letters 45, 4299–4308 (2018).
Massoud, E. C., Espinoza, V., Guan, B. & Waliser, D. E. Global Climate Model Ensemble Approaches for Future Projections of Atmospheric Rivers. Earth’s Future 7, 1136–1151 (2019).
Zhang, P., Chen, G., Ma, W., Ming, Y. & Wu, Z. Robust atmospheric river response to global warming in idealized and comprehensive climate models. Journal of Climate 34, 7717–7734 (2021).
Massoud, E. et al. Atmospheric Rivers and Precipitation in the Middle East and North Africa (MENA). Water 12, 2863 (2020).
Ionita, M., Nagavciuc, V. & Guan, B. Rivers in the sky, flooding on the ground: the role of atmospheric rivers in inland flooding in central Europe. Hydrology and Earth System Sciences 24, 5125–5147 (2020).
Slinskey, E. A., Loikith, P. C., Waliser, D. E., Guan, B. & Martin, A. A Climatology of Atmospheric Rivers and Associated Precipitation for the Seven U.S. National Climate Assessment Regions. Journal of Hydrometeorology 21, 2439–2456 (2020).
Bozkurt, D. et al. Influence of African Atmospheric Rivers on Precipitation and Snowmelt in the Near East’s Highlands. Journal of Geophysical Research: Atmospheres 126, e2020JD033646 (2021).
Francis, D. et al. Atmospheric rivers drive exceptional Saharan dust transport towards Europe. Atmospheric Research 266, 105959 (2022).
Chakraborty, S. et al. Extending the Atmospheric River Concept to Aerosols: Climate and Air Quality Impacts. Geophysical Research Letters 48, e2020GL091827 (2021).
Chakraborty, S., Guan, B., Waliser, D. E. & Da Silva, A. M. Aerosol atmospheric rivers: climatology, event characteristics, and detection algorithm sensitivities. Atmospheric Chemistry and Physics 22, 8175–8195 (2022).
Zhou, Y., Kim, H. & Guan, B. Life Cycle of Atmospheric Rivers: Identification and Climatological Characteristics. Journal of Geophysical Research: Atmospheres 123 (2018).
Shearer, E. J. et al. Examination of Global Midlatitude Atmospheric River Lifecycles Using an Object-Oriented Methodology. Journal of Geophysical Research: Atmospheres 125, e2020JD033425 (2020).
Xu, G., Ma, X., Chang, P. & Wang, L. Image-processing-based atmospheric river tracking method version 1 (IPART-1). Geoscientific Model Development 13, 4639–4662 (2020).
Hersbach, H. et al. The ERA5 global reanalysis. Quarterly Journal of the Royal Meteorological Society 146, 1999–2049 (2020).
Valenzuela, R. et al. An extraordinary dry season precipitation event in the subtropical Andes: Drivers, impacts and predictability. Weather and Climate Extremes 37, 100472 (2022).
Wille, J. D. et al. Antarctic Atmospheric River Climatology and Precipitation Impacts. Journal of Geophysical Research: Atmospheres 126, e2020JD033788 (2021).
Francis, D., Mattingly, K. S., Temimi, M., Massom, R. & Heil, P. On the crucial role of atmospheric rivers in the two major Weddell Polynya events in 1973 and 2017 in Antarctica. Science Advances 6, eabc2695 (2020).
Mattingly, K. S., Mote, T. L. & Fettweis, X. Atmospheric River Impacts on Greenland Ice Sheet Surface Mass Balance. Journal of Geophysical Research: Atmospheres 123, 8538–8560 (2018).
Gorodetskaya, I. V. et al. The role of atmospheric rivers in anomalous snow accumulation in East Antarctica. Geophysical Research Letters 41, 6199–6206 (2014).
Neff, W., Compo, G. P., Martin Ralph, F. & Shupe, M. D. Continental heat anomalies and the extreme melting of the Greenland ice surface in 2012 and 1889. Journal of Geophysical Research: Atmospheres 119, 6520–6536 (2014).
Vicencio Veloso, J. M. Analysis of an extreme precipitation event in the Atacama Desert in January 2020 and its relationship to humidity advection along the Southeast Pacific. Atmósfera 35, 421–448 (2022).
Guan, B. [Data] Global Atmospheric Rivers Database, Version 4, UCLA Dataverse, https://doi.org/10.25346/S6/ZSW7UN (2024).
Guan, B. [Code] Tracking Atmospheric Rivers Globally as Elongated Targets (tARget), Version 1, UCLA Dataverse, https://doi.org/10.25346/S6/SJGRKY (2021).
Guan, B. [Code] Tracking Atmospheric Rivers Globally as Elongated Targets (tARget), Version 2, UCLA Dataverse, https://doi.org/10.25346/S6/PSP5N0 (2021).
Guan, B. [Code] Tracking Atmospheric Rivers Globally as Elongated Targets (tARget), Version 3, UCLA Dataverse, https://doi.org/10.25346/S6/B89KXF (2021).
Guan, B. [Data] Global Atmospheric Rivers Database, Version 3, UCLA Dataverse, https://doi.org/10.25346/S6/YO15ON (2022).
Neiman, P. J., Ralph, F. M., Wick, G. A., Lundquist, J. D. & Dettinger, M. D. Meteorological Characteristics and Overland Precipitation Impacts of Atmospheric Rivers Affecting the West Coast of North America Based on Eight Years of SSM/I Satellite Observations. Journal of Hydrometeorology 9, 22–47 (2008).
Ralph, F. M. et al. Dropsonde Observations of Total Integrated Water Vapor Transport within North Pacific Atmospheric Rivers. Journal of Hydrometeorology 18, 2577–2596 (2017).
Ralph, F. M. et al. ARTMIP-early start comparison of atmospheric river detection tools: how many atmospheric rivers hit northern California’s Russian River watershed? Climate Dynamics 52, 4973–4994 (2019).
Lamjiri, M. A., Dettinger, M. D., Ralph, F. M. & Guan, B. Hourly storm characteristics along the U.S. West Coast: Role of atmospheric rivers in extreme precipitation. Geophysical Research Letters 44, 7020–7028 (2017).
Eiras-Barca, J. et al. European West Coast atmospheric rivers: A scale to characterize strength and impacts. Weather and Climate Extremes 31, 100305 (2021).
Guan, B. [Code] AR Model Evaluation Metrics, UCLA Dataverse, https://doi.org/10.25346/S6/SLC2DG (2022).
Guan, B. [Code] Tracking Atmospheric Rivers Globally as Elongated Targets (tARget), Version 4, UCLA Dataverse, https://doi.org/10.25346/S6/SF4AFW (2024).
Hersbach, H. et al. ERA5 hourly data on single levels from 1940 to present, Copernicus Climate Change Service (C3S) Climate Data Store (CDS), https://doi.org/10.24381/CDS.ADBB2D47 (2023).
Knapp, K. R., Diamond, H. J., Kossin, J. P., Kruk, M. C. & Schreck, C. J. International Best Track Archive for Climate Stewardship (IBTrACS) Project, Version 4, NOAA National Centers for Environmental Information, https://doi.org/10.25921/82TY-9E16 (2018).
Knapp, K. R., Kruk, M. C., Levinson, D. H., Diamond, H. J. & Neumann, C. J. The International Best Track Archive for Climate Stewardship (IBTrACS): Unifying Tropical Cyclone Data. Bulletin of the American Meteorological Society 91, 363–376 (2010).
Acknowledgements
This research was supported by NASA grants 80NSSC20K1344, 80NSSC21K1007, and 80NSSC22K0926, and the California Department of Water Resources Atmospheric Rivers Program via University of California, San Diego. Development of the AR detection code was supported by NASA and the California Department of Water Resources. ERA5, produced with CY41R2 of the ECMWF Integrated Forecast System, is obtained online71. IBTrACS version 4 is obtained online72. The graphics are prepared with GrADS (http://cola.gmu.edu/grads/). Discussion with Dr. Ruping Mo of ECCC on ARs in ERA5 was helpful. DEW’s contribution to this study was carried out on behalf of the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration.
Author information
Authors and Affiliations
Contributions
B.G. conceived the study, produced the data and analysis, and wrote the initial draft of the paper. D.E.W. provided feedback on the analysis and contributed to writing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Guan, B., Waliser, D.E. A regionally refined quarter-degree global atmospheric rivers database based on ERA5. Sci Data 11, 440 (2024). https://doi.org/10.1038/s41597-024-03258-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41597-024-03258-4
This article is cited by
-
EDARA: An ERA5-based Dataset for Atmospheric River Analysis
Scientific Data (2024)
