
Abstract
Surface-grafting polymer brushes (SPB), which are used in a versatile technique to easily realize surface modifications, can be commonly used to change the inherent surface physical/chemical properties of materials. In particular, producing functional polymer brushes with well-defined chemical configurations, densities, architectures, and thicknesses on a material surface has become increasingly important in many fields. Achieving such goals is highly dependent on the progress of novel surface-grafting strategies, which are commonly based on surface-initiated polymerization (SIP) methods. On the other hand, practical applications have been given more attention since the SPB technique enables the engineering of materials with diverse functions. This review reports some new grafting strategies for generating polymer brush layers and then systematically summarizes research advances in the application of polymer brush-modified materials in multiple fields. Correspondingly, some necessary challenges of the SPB technique are unreservedly pointed out, with consideration given to its real applications in the future. The aim of this article is to tell readers how to engineer functional materials through SPB techniques and what can be done with polymer brushes in the future.
Similar content being viewed by others
Introduction
Polymer brushes are becoming increasingly popular because of their potential applications in multiple research fields1,2, such as in surface modification, synthetic biomimetic materials, tissue engineering, etc., based on their controllable chemical configuration, density, architecture, and thickness, which are adjustable down to the nanoscale, along with their easy preparation. Meanwhile, the surface-grafting polymer brush (SPB) technique has become an indispensable means for functionalizing materials3,4. As reported, there are many new methods to generate polymer brush layers on material surfaces. These methods enable easy design and preparation of novel functional materials. Meanwhile, some of these functional materials have achieved real applications, while others are still on the way to being applied.
Polymer brushes with variable conformations and structures enable the preparation of novel functional surfaces5. In particular, the conformation and structure of polymer brush chains can be dynamically regulated by using a variety of external stimuli6. Such stimulus–responsive features of polymer brushes provide the basis for creating “smart” surfaces for a wide variety of applications7,8, with attributes, including tunable wettability9, self-cleaning ability10, controllable catalysis11, modulation of membrane transportation12,13, controlled cell adhesion14,15, responsive actuation16, controlled drug delivery17, and friction control18.
Based on the above characteristics, the SPB technique has aroused special attention in the fields of friction, anti-fouling and membrane sciences. For example, surface-grafting hydrophilic polymer brushes have been an effective means by which to improve interfacial lubrication properties19,20. In the past 15 years, such a technique has been successfully employed to achieve low friction on material surfaces21. Based on this technique, some functional water-lubrication coatings have also been successfully developed and have generated practical applications, e.g., in artificial hip joints22,23. Moreover, surface-grafting hydrophilic polymer brushes can also create functional coatings, which act as effective anti-fouling barriers24 and resist the adsorption of nonspecific proteins25, bacteria26, and marine microorganisms27. As a result, some functional anti-fouling coatings have been successfully developed28. Furthermore, through combining the SPB technique with other technical means, its application range has been largely expanded. For example, grafted polymer brushes work as a bridging layer, which can be further functionalized by extracellular matrix (ECM) proteins or functional peptides to improve or control the bioactivity of the material surface29,30,31,32. Additionally, the growth of polymer brushes in confined environments has also become an established technique for preparing many functional films with great application potential in the fields of protein adsorption, catalysis, and separation33.
The above-mentioned applications of polymer brushes are just a few important examples. This article concentrates exclusively on preparing functional materials by the surface-grafting polymer brush (SPB) technique. The aim of this review introduces some new methods for the surface grafting of polymer brushes, then highlights the use of polymer brushes to construct functional materials. Correspondingly, some key bottlenecks and challenges are also discussed. Finally, an outlook based on the development of brushed functional materials is proposed. The following sections will introduce the simple physics of polymer brushes, new strategies of SPB, and functional materials based on the SPB technique and their wide applications.
Simple introduction of polymer brush physics
Commonly, polymer brushes can be generated on a solid surface by the assembly of end-functionalized or surface-initiated polymer systems. The brush tethering can be very dense under equilibrium conditions, and polymer chains stretch along the direction normal to the substrate surface. Compared with the random configuration of flexible polymer chains in solution, polymer brush chains in good solvents always continue to stretch and avoid approaching each other to maximize their interaction with the solvent. Different from the behavior of linear homopolymer brushes, mixed homopolymer brushes, random copolymer brushes and block copolymer brushes commonly show typical phase-transition behavior in different solvent environments4,34,35. Such solvent-induced phase-transition behavior can yield unique surface properties of polymer brush-modified systems. Moreover, in the melted state, polymer chains tend to stretch away from the surface to avoid overfilling incompressible space and minimize the interface free energy.
A reasonable definition of polymer brushes is critical to understand their physics36. In a typical case, the value of the radius of gyration (Rg) of a single chain is always larger than the average distance between the grafting points. Correspondingly, the structure of the polymer chain can be estimated by the inverse value of the distance between grafting points (D). Meanwhile, the grafting density (σ) is an important parameter for characterizing the physical nature of the polymer chains. Commonly, the grafting density is defined as: σ = (ρ h NA)/Mn (ρ is the bulk density of the brush, h is the thickness of the brush and NA is Avogadro’s number). Γ = h × ρ, which is the surface coverage of the polymer brush chains. Therefore, the grafting density can also be defined as: σ = (Γ NA)/Mn. In a typical case, the polymer chains tend to overlap when the chain size achieves the distance between grafting points. To quantitatively judge the conformational state of the polymer chains, a key parameter ∑(∑ = σπ\(R_g^2\)), defined as the reduced tethered density, is employed. Theoretically, chains are in the “mushroomed” state when ∑ < 1, in the mushroomed-to-brushed transition state when 1 < ∑ < 5 and in the highly stretched state when ∑ > 5. Correspondingly, experimental studies have well verified such predictions of the relationship between the grafting density and conformational state37,38. However, the authors hold that clear boundaries for such transitions are always difficult to identify in real systems because of the measurement inaccuracy of Rg, especially for polymer systems with complicated architectures. So, a new theoretical model should be developed to further understand the physics of complex polymer systems.
New chemical strategies for tethering functional polymer brushes onto substrates
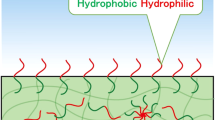
Over the past few years, chemists have developed different kinds of synthetic strategies to generate polymer brush layers on material surfaces. In general, polymer brushes can be attached to solid surfaces by “grafting to” and “grafting from” methods4. In the “grafting to” method39, functionalized polymer brush chains can be attached onto a solid substrate by non-covalent interactions (Fig. 1a) or chemical reactions (Fig. 1b). In the “grafting from” method3, the commonly used strategy involves surface-initiated polymerization (SIP) techniques, such as ATRP40, reversible addition−fragmentation transfer (RAFT)41,42, ring-opening metathesis polymerization (ROMP)43, and nitroxide-mediated polymerization (NMP)44. The SIP techniques resemble planting rice in soils, as vividly proposed by Zhou and colleagues.5. In a typical case, the assembly of an initiator on the material surface is similar to the transplantation of rice seedlings, and the subsequent polymerization process is akin to rice growth.

a Attaching polymer brushes onto substrates by non-covalent interaction. b Grafting polymer brushes onto substrates by chemical coupling reactions between functional groups. c–f Grafting polymer brushes onto substrates by the surface-initiated radical polymerization (SIRP) technique (c SIRP based on a halogen-containing ATRP initiator; d SIRP based on a polydopamine photoinitiator; e SIRP based on a benzophenone photoinitiator). f Grafting polymer brushes through the substrates by the subsurface-initiated radical polymerization (s-SIRP) technique based on the halogen-containing ATRP initiator
Among different SIP methods, researchers mostly use surface-initiated atom-transfer radical polymerization (SI-ATRP)1, because it provides many advantages in the preparation of well-defined polymer brushes (Fig. 1c), including easy initiator synthesis, fair control over polymer growth, a “living” end for copolymer grafting, and polymerization in aqueous solutions. Commonly, the traditional SI-ATRP method includes the assembly of a halogen-based initiator on the substrate and subsequent initiation of radical polymerization. Meanwhile, one can choose a suitable halogen-based initiator to realize polymerization according to the substrate properties45. To maximize the universality of the initiator molecule, utilizing a mussel-inspired initiator to perform SI-ATRP has become popular46. Based on the mussel-inspired initiator, polymer brushes can be grown easily on various material surfaces. Furthermore, the traditional SI-ATRP method always suffers several drawbacks, including limited applicability on various material surfaces, rigorous synthetic protocols, heavy consumption and waste of unreacted monomers, and limited ability to control the polymerization process. In addition to the inability to reuse the polymerization solution, the performance of conventional SI-ATRP often requires inert gas protection, and the use of metal catalysts may be harmful for some applications. To address these problems, chemists have devoted considerable effort to improving this method. For example, the electrochemically mediated ATRP (SI-eATRP) method was developed to resolve the inert gas protection problem47. This method can be used to generate polymer brushes on a conducting or nonconducting substrate in the presence of air48,49. This method has been successfully used to fabricate a functional coating with an ultralow protein-absorption property50, which exhibits great application potential in the surface modification of implantable devices. Subsequently, Zhou’s group developed a novel method to grow polymer brushes on general substrates based on the difference of electrochemical potential51, named the sacrificial anode ATRP (sa-ATRP) method. This method allows the growth of polymer brushes on material surfaces using a very small volume of monomer solution in the presence of air. Subsequently, Yoshida and colleagues52 used the sa-ATRP method to successfully prepare artificial cilia as autonomous nanoactuators to realize controllably unidirectional motion. Furthermore, the same group developed a novel ultraviolet (UV)-induced SI−ATRP method to produce polymer brushes on material surfaces in the presence of air under UV irradiation53. Using this method, one can create various patterned functional surfaces with polymer brushes.
Different from the case of the traditional SI-ATRP method, Sheng et al.54 described a simple yet extremely versatile surface polymer brush modification approach based on a polydopamine (PDA) layer (Fig. 1d). That is, PDA deposits on virtually any substrate and can act as a photoinitiating layer to initiate radical polymerization. This method does not require any metal/ligand catalysts, additional photoinitiators or dye sensitizers. Therefore, this method is a universal surface-initiated polymerization technique to generate polymer brushes from “anywhere”. Additionally, another universal/mild method to perform SIP includes photo-initiation strategies based on a variety of photoinitiators55. In a typical case, the photoinitiators are commonly coated onto or embedded into the subsurface of the substrates by the solvent swelling method, and then the radical polymerization of the monomer solution is initiated under UV irradiation (Fig. 1e)23,56. This method is easy and effective for generating polymer brushes on polymer substrates and is especially suitable for inert materials with low-surface energies. Kawaguchi and colleagues22 used this method to graft hydrophilic polymer brushes on the surface of cross-linked ultrahigh molecular weight polyethylene (CL-UHMWPE), and the modified material can be used as an ideal cartilage replacement material.
However, the traditional SIP method only allows the grafting of polymer brushes on the top surfaces of substrates, i.e., polymer chains are attached via a single linkage plane on the surface, without within-depth attachment. As a result, the thickness of the grafted polymer brushes is usually very thin, at dozens of nanometers to hundreds of nanometers and is liable to be wiped away under high-load conditions with long-term shearing. These factors may lead to poor mechanical stability of the generated polymer bush layer. Finally, this problem limits the real application of polymer brushes in engineering fields. To address this problem, polymer brushes are chemically interpenetrated within the polymer network in some novel synthetic strategies (Fig. 1f)57. For example, Zhou and colleagues58 reported a new method to produce thick hydrophilic polymer brush layers through embedding the initiator into the polymer substrate, which allows the reinitiation of polymerization after the surface polymer brushes are refreshed. As expected, the grafted polymer brushes form an interpenetrating network with the original polymer chains, resulting in the appearance of a low-modulus composite layer. The composite layer shows excellent anti-wear properties compared to traditional polymer brush systems. However, the above-mentioned methods are only available to construct polymer brush materials with uniform two-dimensional (2D) structures. Zheng et al.59,60,61 developed a series of new technologies to fabricate three-dimensional (3D) structures of polymer brushes on the micro and nano scales, which highly expands the functionalities of polymer brushes.
In this section, particular focus is given to recent advances in methods to generate polymer brushes on material surfaces. Some of these methods exhibit good polymerization controllability, while this attribute would be difficult to achieve via others. Next, we will show how these methods can be advantageously used to create functional materials.
Properties and applications of polymer brushes
Changing the surface wettability of materials
Regulating the wettability of material surfaces is extremely important for realizing special functionalities for wide applications. Many methods have been developed and employed to control the wettability of material surfaces. The surface-grafted polymer brush (S-g-PB) technique, as one universal chemical modification strategy, exhibits unique advantages in controlling the surface wettability of materials. Especially, the surface-grafting stimulus–responsive polymer brush (S-g-SRPB) technique can offer the unique capability of controllably and reversibly changing the surface wettability, resulting from the dynamic conformation transition of polymer chains under external stimuli.
Jiang and colleagues62 showed that surface-grafting poly (N-isopropyl acrylamide) (PNIPAAm) brushes on silica wafers can offer an effective means for constructing thermally responsive functional surfaces (Fig. 2a). The wettability of the modified surface can be switched reversibly below and above the LCST of the PNIPAAm brushes. When the temperature was increased from 25 °C to 40 °C, the water contact angle (WCA) changed from ∼63° to ∼93°. The switchable mechanism for the wettability can be attributed to interaction changes between the molecular chains of PNIPAAm and water molecules. Furthermore, after grafting polymer brushes onto rough surfaces (micro/nanostructure), the wettability change can be obviously enhanced. Compared with that achieved by grafting polymer brushes onto flat surfaces, grafting hydrophilic polymer brushes onto a rough surface can make the surface more hydrophilic, while grafting hydrophobic polymer brushes onto a rough surface can make the surface more hydrophobic63. For example, Fu et al.64 reported reversible switching between the superhydrophobic and superhydrophilic states on the surface of a PNIPAAm brush-grafted nanoporous anodic aluminum oxide (AAO) membrane. Jiang et al. observed reversible, thermoresponsive wettability switching between the superhydrophilic (below LCST) and superhydrophobic (above LCST) states after grafting PNIPAAm brushes onto a rough silicon substrate65. Additionally, some recent reports indicated that surface grafting of PNIPAAm brushes onto micro/nano surfaces can also realize thermoresponsive wettability switching for oil droplets underwater. For example, Du et al.66 described a method for preparing a hairy soft/hard combination surface by grafting PNIPAAm brushes onto nano hydrogel brush fibers using the SI-ATRP technique. The as-prepared functional surface demonstrates reversible, thermoresponsive wettability switching of oil droplets between the oleophobic state and oleophilic state.

a Switching the surface wettability of a PNIPAAm brush-modified silica wafer and the corresponding conformational transition mechanism of polymer chains below and above its LCST. Reprinted with permission from Jiang et al.62. Copyright© 2004, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. b Switching of the surface wettability of a photosensitive polymer brush-coated surface after visible (left) and UV (right) irradiation and the corresponding polymer chain switching mechanism. Reprinted with permission from Samanta et al.67. Copyright© 2014, American Chemical Society. c Schematic diagram showing the switching behavior of binary polymer brushes upon treatment with selective solvents. Reprinted with permission from Stamm and colleagues71. Copyright© 2008, Royal Society of Chemistry. d Switching of the surface wettability of a PMEP brush-modified substrate and the corresponding switching mechanism. Top: schematic of the association-dissociation equilibrium upon contact with solutions of different pH values. Bottom: a water droplet on PMEP brushes treated with different pH solutions. Reprinted with permission from Zhou et al.76. Copyright© 2005, Royal Society of Chemistry. e Switching of the surface wettability of a PNIPAAM-co-PAA copolymer brush-modified rough silicon substrate to realize wide range of wettability control between the superhydrophilic state and the superhydrophobic state. Reprinted with permission from Jiang and clleagues79. Copyright© 2006, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. f Switching of the surface wettability from the superhydrophobic state to the superhydrophilic state for a pH/glucose- and temperature-sensitive polymer brush-modified surface. Reprinted with permission from Xia et al.80. Copyright© 2007, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
Following a similar design strategy, the surface grafting of photoresponsive polymer brushes onto substrates can also allow dynamically changing the wettability of surfaces. Samanta et al.67,68 reported the fabrication of photoresponsive material surfaces by grafting poly(spiropyran methacrylate-co-methyl methacrylate) (PSPMA) brushes onto oxide surfaces using the SI-ROMP polymerization technique. The as-prepared substrate surface can realize dynamic wettability switching from the hydrophobic state to the hydrophilic state upon UV (365 nm) exposure (Fig. 2b). The switching mechanism of wettability is based on the cleavage of the spiro C–O bond to generate a conjugated form. Correspondingly, the surface-attached molecules can be changed from an electrically neutral state to a charged state, resulting in responsive wettability switching. After irradiation with visible light (500 nm), the hydrophilic surface reverts to its initial hydrophobic state. Compared with temperature-induced wettability switching, the use of light as an easy means to control the surface wettability is more readily achievable.
Furthermore, the surface grafting of block copolymer brushes or binary/mixed polymer brushes allows the realization of reversible surface wettability switching based on the solvent-induced phase segregation of the brush chains. The key mechanism behind this effect is that the solvent affinity changes the brush morphology when exposed to a special solvent69,70. For example, Stamm and colleagues71 reported controlling the wettability of a binary polystyrene (PS)/poly(2-vinylpyridine) (P2VP) brush-modified surface by changing the solvent environment (Fig. 2c). The experimental results indicated that the brush-modified surface demonstrated a hydrophobic state after treatment with toluene, while it exhibited a hydrophilic state after treatment with acidic water. Meanwhile, such solvent-responsive conformation transitions of polymer chains can be used to reversibly lift and lower CdS nanoparticles along the perpendicular direction. Based on a similar responsive mechanism, Han et al.72 grafted PS-b-(PMMA-co-PCdMA) brushes onto a silicon wafer by SI-ATRP), which can also be used to reversibly lift and hide CdS nanoparticles along the perpendicular direction. Importantly, surface grafting of solvent-responsive polymer brushes can also be effectively used for the engineering of functional self-cleaning materials. For example, Youngblood and Howarter10 described a method to prepare a self-cleaning surface by grafting oligomeric amphiphiles of polyethylene glycol with short perfluorinated end caps (f-PEGs). The modified surface can successfully remove oil when immersed into water. Minko and colleagues73 modified Si channels by grafting solvent-responsive PS/P2VP polymer brushes along a gradient. The resulting channels can be used as a microfluidic device for successfully separating two immiscible liquids (water and toluene).
Surface grafting of pH-responsive polymer brushes can also be used to intelligently regulate the wettability of a material surface. As is well known, pH-responsive polymer brushes often contain weak acidic or basic groups with certain pKa values74,75. Modified polymer brushes can accept or donate protons in response to pH changes of the media, along with conformational changes of the polymers chains, resulting in a change of the surface wettability. For example, Zhou and Huck76 grafted pH-responsive poly(methacryloyl ethylene phosphate) (PMEP) brushes onto a substrate surface, and the as-prepared surface could realize smart switching of the surface wettability from applying droplets with a wide range of pH values (Fig. 2d). In a typical case, the modified surface was completely wetted with a superhydrophilic state when the pH > 7, because the phosphate groups were completely deprotonated. The wetting angle decreased within the pH range of 2–7 because of the partial protonation of the phosphate groups. At pH = 1, the phosphate groups were completely protonated, and the surface became difficult to wet. Other examples of pH-induced wettability changes based on polymer brush-modified systems are mainly focused on poly(acrylic acid) brushes, which have commonly been used to regulate wettability both in air77 and underwater78.
The above systems are commonly based on a single-responsive polymer brush, whereas polymer brushes with dual/multiple-responsive features would provide new ideas for performing wettability switching in more than one way. For example, Jiang and colleagues79 grafted PNIPAAm-co-PAA copolymer brushes onto rough silicon substrates to realize temperature/pH dual-responsive wettability switching between the superhydrophilic state and the superhydrophobic state (Fig. 2e). Subsequently, Xia et al.80 described a method to prepare a multiresponsive functional material by coating it with block copolymer brushes with pH-, glucose-, and temperature-responsiveness. The experimental results showed that the as-prepared surface could realize reversible wettability changes from superhydrophobic state to superhydrophilic state between the conditions of a 0 g/l glucose concentration, pH = 4.8, and a temperature of 26 °C and a 16.7 g/l glucose concentration, pH = 10.1, and a temperature of 15 °C (Fig. 2f).
In addition to grafting polymer brushes directly onto the surface of a material to change the inherent wettability, polymer brush-based nano- and microscale materials can also be applied onto substrates to control the wettability. For example, Zheng and colleagues81,82 grafted polymer brushes onto 2D graphene sheets by the ATRP technique to prepare a new type of organic 2D material, namely, polymer@graphene 2D objects. The as-prepared 2D objects can be easily transferred to various nonreactive substrates (e.g., PTFE) to change and tune their surface wettability.
In summary, grafting polymer brushes (especially responsive polymer brushes) onto substrates is an effective means by which to change the surface wettability of materials. Upon exposing such functional materials to external stimuli in the environment, the switchable wettability can realize many potential applications, including self-cleaning, liquid droplet transfer, and oil–water mixture separation. Particularly, the grafting of functional polymer brushes onto rough material surfaces with micro-/nanostructure features can allow wettability switching between superhydrophilicity and superhydrophobicity. Meanwhile, it should be pointed out that though wettability changes based on polymer brush modification commonly focus on traditional solid surfaces, functionalizing novel materials (e.g., hydrogels) using brushed molecular chains has also gained great attention. For example, Liu and colleagues83,84,85 developed a ubiquitous strategy to superhydrophobize the surfaces of hydrogels by grafting brushed chains with low-surface energy, creating heterogeneous wettability across the surface and the inner network. Even so, the key problem is that polymer brushes grafted onto micro-/nanocomposite surfaces often have poor wear-resistance properties, which highly limits their real application in the field of surface engineering. Additionally, one urgent challenge lies in how to develop a general/universal method to reduce the cost of polymer brush surface-grafting techniques. In the future, polymer brush techniques can combine traditional coating techniques for the engineering of novel functional materials to control the surface wettability.
Constructing functional drag-reduction surfaces
As described above, the grafting of functional polymer brushes onto substrates can change the static wettability behavior of materials. Correspondingly, the wettability change is also accompanied by the evolution of dynamic fluid behavior at the solid–liquid interface. For example, upon attaching a hydrophilic polymer onto a substrate surface, the as-prepared functional materials can be used to reduce the flow resistance of liquids86. Compared to hydrophilic surfaces, the as-prepared superhydrophobic surfaces exhibit superior drag-reduction efficiency87,88. The mechanism responsible for the drag-reduction by superhydrophobic surfaces is the existing gas film at the solid–liquid interface providing an effective barrier to prevent liquids from wetting the solid surface89. As a result, the “fluid–solid” shearing mode is replaced by a “fluid–air” shearing mode, and correspondingly, the drag-reduction characteristic appears. In recent years, Zhou and coworkers have been focusing on the study of drag-reduction properties for polymer brush-modified micro-/nanostructured materials. For example, Wu et al.90 showed that boundary slippage exists for diverse liquids on superhydrophobic solid surfaces. Such surfaces can display a dramatic slippage effect and generate a high drag-reduction efficiency of ~10–20%, which depends on both the liquid viscosity and the surface tension. The observed liquid slippage can be attributed to the synergy between the surface micro/nanostructure and the low-surface energy polymer chains.
Subsequently, responsive polymer brushes have been grafted onto superhydrophobic micro/nanocomposite surfaces to construct intelligent drag-reduction systems. The as-prepared material surfaces can realize controllable boundary slippage at the solid–liquid interface. For example, Wu et al.91 described the method by which to graft temperature-responsive poly(N-isopropyl acrylamide) (PNIPAm) brushes onto a superhydrophobic alumina surface. The surface adhesion of water droplets on the as-prepared surface can be dynamically regulated below and above the LCST of the PNIPAm brushes, which can highly affect the boundary slippage of the liquid. In a typical case, a slip length range of ~87 μm can be achieved reversibly by changing the temperature below and above the LCST of the PNIPAm brushes. Subsequently, Wu et al.92 synthesized photoresponsive copolymer brushes containing catechol and azobenzene derivatives and then deposited them onto a rough anodized aluminum surface. The adhesion of water droplets on this functional surface can be controlled by UV exposure and dark storage, which results in switchable sliding states of water droplets (Fig. 3a). Furthermore, Wu and coworkers93 separately grafted two different kinds of pH-responsive polymer brushes of poly(dimethylaminoethyl methacrylate) (PDMAEMA) and poly(methacrylic acid)(PAA) onto an initiator-modified anodized alumina substrate. By regulating the swelling states of the two polymer brushes, water droplets with different pH values could roll off or adhere to the textured surface. As a result, pH-responsive boundary slippage can be achieved on such a textured surface by employing rheological experiments (Fig. 3b).

a Schematic diagram of the surface grafting of photoresponsive copolymer brushes (containing catechol and azobenzene derivatives) onto rough anodized aluminum to realize the reversible adhesive state transformation of water droplets (left) and a switchable boundary slip length based on the photoresponsive interchangeable cycles of the adhesive state (right). Reprinted with permission from Wu et al.92. Copyright© 2014, Royal Society of Chemistry. b Schematic diagram of the switchable adhesion states of acidic and alkaline droplets on a rough anodized aluminum surface-grafted with PDAMEMA and PMAA (left) and reversible switching of the boundary slip length on a PDMAEMA surface by changing the pH of the fluid (right). Reprinted with permission from Zhou and colleagues93. Copyright© 2014, American Chemical Society
In summary, the grafting of low-surface energy polymers onto micro/nanocomposite material surfaces enables obtaining effective boundary slippage of liquids. Especially, grafting responsive polymer brushes onto low-surface energy textured surfaces is highly effective for obtaining switchable slippage of liquids under external stimuli. However, an issue lies in that the air film at the solid–liquid interface is always unstable at large Reynolds numbers, which commonly causes the failure of drag-reduction. Therefore, how to effectively seal the air film at the solid–liquid interface is the key problem. In the future, polymer brushes can be combined with traditional coating techniques for the engineering of composite functional materials with controlled drag-reduction.
Preparation of functional superwettability devices
Grafting polymer brushes onto the inner surfaces of channels or some complex 3D structures can enable to the preparation of functional superwettability devices. For example, Wang et al.94 described a method to prepare functional superwettability devices by grafting hydrophilic or hydrophobic polymer brushes onto the surfaces of 3D-printed polymer structures. The basic strategy is to add a vinyl-terminated initiator into ultraviolet (UV) curable resin to print integrated 3D initiator objects, namely, i3DP, with modifiable surfaces, which can easily result in functional materials by growing polymer brushes via the SI-ATRP technique (Fig. 4a). Typically, two representative monomers have been chosen to grow polymer brush coatings on the printed architectures. One is poly(ethylene glycol) methacrylate (PEGMA), which can improve the biocompatibility of the structural material, while the other is 1H, 1H, 2H, 2H-perfluorodecyl methacrylate (PFMA), which is expected to create a surface with a low-surface energy. Owing to the enhancement of wettability by roughness, the printed lattices became superhydrophilic and superhydrophobic after poly(PEGMA) and poly(PFMA) modification, respectively (Fig. 4b). In particular, on the poly(PFMA)-modified superhydrophobic sphere-shaped lattice, water cannot even be thrown out under violent shaking (Fig. 4c). This simple and cost-effective method provides a good means by which to prepare functional devices for potential applications in the fields of biomedical science, microfluidics, and oil–water/emulsion separation.

a Schematic illustration of the i3DP technique for preparing structural materials via initiator-integrated 3D printing and subsequent SI-ATRP. b The 3D-printed lattice becomes superhydrophilic after the grafting of poly(PEGMA) brushes, while it becomes superhydrophobic after the grafting of poly(PFMA) brushes. c Water can be steadily encapsulated into the poly(PFMA)-grafted lattice under violent shaking. Reprinted with permission from Wang et al.94. Copyright© 2013, Royal Society of Chemistry
Moreover, surface wettability is intrinsically advantageous for the engineering of microfluidic devices. Grafting polymer brushes with superwettability features onto the surface of 3D channels is a necessary means for constructing functional fluidic devices. For example, Wirth and coworkers grafted hydrophilic polyacrylamide brushes onto a PDMS microfluidic chip by the SI-ATRP technique95. The modified microfluidic chip can minimize protein nonspecific adsorption and realize efficient separation of lysozymes and cytochromes. C. Bunker and coworkers developed a microfluidic device with switchable wettability by grafting 4 nm-thick thermoresponsive PNIPAm brushes onto the channels of a film96. The as-prepared microfluidic device can adsorb proteins from solution above the PNIPAm LCST based on the hydrophobic state of the polymer chains and then release them on command below the PNIPAm LCST based on the hydrophilic state of the polymer chains. So, this functional microfluidic device can realize intelligent switching between a protein-adsorbing hydrophobic state and an anti-fouling hydrophilic state. Additionally, changing the surface wettability of channels by the grafting of polymer brushes always affects the electronic properties of the materials. For example, grafting responsive polymer brushes onto the wall of a cone-shaped nanopore is highly achievable for creating functional nanofluidic devices97. Meanwhile, the electronic readout of the nanodevice can be intelligently switched between the “on” and “off” states by regulating its wettability, imitating similar functions to those of natural cell membranes. A detailed introduction of nanofluidic devices is provided in Section 4.6.
Reducing the surface friction
In the past few decades, many studies have indicated that surface modification with functional polymers can effectively improve the tribological properties of materials98,99. Meanwhile, it has been proven that surface grafting of brushed polymers is an effective chemical means for reducing the surface friction force of materials23. The common method employed to realize the grafting of such polymer brushes is based on the surface-initiated radical polymerization (SIRP) technique3, which can be performed on flat/rough substrate surfaces or spherical particles. The polymer brushes grafted onto the flat/rough substrate can act as an effective barrier layer to resist heavy wear from two sliding surfaces (Fig. 5a). By contrast, particles modified with brush chains can work as good lubrication additives to prevent sliding surfaces from directly contacting (Fig. 5b). The grafted brushes can be hydrophilic to improve the water-lubrication properties of systems, while the surface grafting of oil-soluble polymer brushes onto a substrate can work well in oil-based lubrication systems.

a Polymer brushes can be grafted onto a solid surface as a lubrication layer to realize low friction or reduce the surface wear. b Polymer brushes can be grafted onto the surface of spherical particles as a lubricant additive to improve interface lubrication or reduce the wear degree of two sliding surfaces. (Meanwhile, the grafted polymer brushes can be oil-soluble and used in oil-based lubrication systems. Additionally, the polymer brushes can be water-soluble and used in water-based lubrication systems. The grafted polymer brushes can be neutral, charged or zwitterionic)
Surface grafting of hydrophilic polymer brushes onto flat substrate surfaces to improve the water-lubrication properties
The basic inspiration for surface-grafting hydrophilic polymer brushes to reduce the surface friction comes from nature. In nature, some biological surfaces show extremely low-friction features based on the water-lubrication mechanism, such as our joint system and eyes. Especially in our hip and knee systems, an extremely low-friction coefficient can be achieved at high Hertz contact pressures100. Water alone existing in such systems cannot act as effective boundary lubricant because of its low viscosity. Natural joint systems realize low friction under high contact pressure by using bottle-brushed biomolecules at the outer surface of the cartilage101. Such biomolecules have suitable viscoelasticity in solution and can easily immobilize large amounts of water molecules to aid in lubrication. Inspired by this concept, reducing the friction coefficient under wet conditions by tethering hydrophilic polymers or polyelectrolytes brushes onto surfaces has been widely reported.
Meanwhile, one of the key applications for the surface grafting of hydrophilic polymer brushes is in improving the tribological properties of implantable artificial joint materials or in developing functional artificial biolubricants suitable for joint systems22. Originally, both linear and brush-like water-soluble polymer brushes were physically adsorbed onto solid surfaces to obtain ultralow friction coefficients in water102,103. However, polymer chains attached through physical adsorption commonly have low grafting densities because of the existing steric hindrance. Additionally, physically adsorbed polymer brushes have poor bonding strength with the substrates, which results in inescapable lubrication failure from dynamic shearing under high contact pressure. By contrast, hydrophilic polymer brushes chemically grafted onto substrate surfaces commonly have high grafting density and strong bonding strength, which enables achieving stable low-friction coefficients in aqueous media104.
Kobayashi et al. described the grafting of hydrophilic polymer brushes and polyelectrolyte brushes onto a Si substrate by a typical “grafting-from” method using the surface-initiated atom-transfer radical polymerization (SI-ATRP) technique21. Subsequently, the macroscopic frictional properties of the system were investigated. Friction testing of the brush-modified surfaces was performed in both aqueous medium and a humid air atmosphere within a wide sliding velocity range. In a typical case, six kinds of hydrophilic polymer brushes, including poly(DHMA) brushes, poly(PVA) brushes, poly(OEGMA) brushes, poly(MTAC) brushes, poly(SPMK) brushes and poly(MPC) brushes were grafted onto the substrate by SI-ATRP (Fig. 6a). When a brush-modified glass ball was used as the sliding probe, the poly(MPC) brush-modified surface exhibited the lowest friction coefficient in both water and humid air. The possible lubrication mechanism is that the brushes, upon swelling in water, form a thicker hydration layer to prevent the sliding glass probe from directly contacting the substrate. For the first time, this work systematically investigated the frictional properties of polymer brushes at the macroscopic level under high contact pressure close to that in natural joint systems, rather than by employing the SFA system. This work lays a firm foundation for developing implantable artificial joint materials. Based on this work, hydrophilic polymer brushes can be grafted onto the surfaces of implantable joint materials to realize real clinical applications. The commonly used joint implantable materials are cross-linked polymers, metals, alloys and carbon films, such as UHMWPE, PEEK, Ti6Al4V, CoCrMo, stainless steel, Al2O3, DLC, etc. For example, Zhou and colleagues105 grafted hydrophilic PSPMK polyelectrolyte brushes onto a DLC surface by the SI-ATRP technique. In a typical case, a two-step modification of the DLC films was carried out by the self-assembly of a mussel-inspired catechol ATRP initiator, followed by surface-initiated polymerization. The poly(3-sulfopropyl methacrylate potassium salt (PSPMA) brush-modified DLC surface showed ultralow and stable interface friction coefficients in water and biological fluids (saline and BSA solution) with weak dependence on the sliding velocity and load (Fig. 6b). Such experimental results showed that surface grafting of hydrophilic polymer brushes can effectively improve the aqueous lubrication properties of DLC-liked implantable joint materials.

a Schematic diagram of the surface grafting of hydrophilic polymer brushes, including PDHMA, PPVA, POEGMA, PMTAC, PSPMK, and PMPC onto a Si substrate by SI-ATRP and the corresponding friction test results. Reprinted with permission from Kobayashi et al.21. Copyright 2010, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. b Schematic diagram of the grafting of hydrophilic PSPMA brushes onto a DLC film by SI-ATRP and the corresponding friction test results. Reprinted with permission from Zhou and colleagues105. Copyright© 2016, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
Kawaguchi and colleagues22 prepared a novel hip composite material by grafting hydrophilic ploy(2-methacryloyloxyethyl phosphorylcholine) (PMPC) polymer brushes onto a cross-linked polyethylene (CL-PE) surface using a photoinitiated polymerization strategy (Fig. 7a). In a typical case, the benzophenone initiator was embedded into the subsurface of the CL-PE by employing a solvent-induced swelling technique. Then, photoinitiated polymerization (hydrogen capturing mechanism) was performed to allow the generation of PMPC brushes, which were covalently bonded with the CL-PE substrate. Subsequently, the friction and wear properties of the PMPC-modified CL-PE were investigated (Fig. 7b). The experimental results indicated that the PMPC grafted onto the CL-PE greatly increased both the lubricity and wear-resistance. Throughout 3 × 106 cycles of gravimetric loading by a hip-joint simulator, the wear amount of the PMPC-CL- PE liner was ~4 and 40 times less than those of CL-PE and PE liners, respectively (Fig. 7c). Such experimental results suggest PMPC grafting as an effective means for use in total joint replacement. Based on this finding, Kawaguchi and his research group applied this kind of material in a large-scale clinical trial. Finally, one kind of novel joint replacement product named as Aquala® was successfully developed (Fig. 7d).

a Surface grafting of PMPC brushes onto a PE liner by the photoinduced graft polymerization technique and the corresponding chemical structure of PMPC. b Lubricity determined by the friction coefficient of the PE plates with and without MPC grafting (MPC-PE and PE, respectively). c Time course of the wear amount produced on the three liners (PE, CL-PE, and MPC-CL-PE) during 3 × 106 cycles of loading. Reprinted with permission from Kawaguchi and colleagues22. Copyright© 2004, Nature Publishing Group. d The PMPC grafted onto UHMWPE at the articulating surface as a hip product (Aquala-KYOCERA, Japan)
As described above, surface grafting of hydrophilic polymer brushes can effectively improve the aqueous lubrication properties of materials. However, in most cases, the grafted polymer brushes only “float” on the surface when employing the traditional SI-ATRP technique, which means that the polymer chains are often attached via a single linkage plane on the surface, without in-depth attachment. Finally, the grafting thickness of the polymer brushes is usually very thin, at dozens of nanometers to hundreds of nanometers and is very easily wiped away under high-load conditions with long-term shearing. So, polymer brushes prepared by the traditional SI-ATRP technique commonly have poor load-bearing and wear-resistance properties. This problem limits the real applications of polymer brushes in engineering tribology.
Surface grafting of hydrophilic polymer brushes onto spherical particles to prepare functional water-lubrication additives
Grafting of hydrophilic polymer brushes onto spherical particles enables the preparation of charged but hairy particles, which can be used as water-lubrication additives in biological systems. Compared with conventional lubricant additives, spherical particles grafted with charged polymer brushes show unique advantages in the field of aqueous lubrication as a novel kind of biomimetic joint fluid. For example, Liu et al.106 reported the fabrication of core/shell charged polymer brush-grafted hollow silica nanoparticles (PSPMA-g-HSNPs) (Fig. 8a). Owing to the good hydration capability of the shells consisting of charged PSPMA polymer brushes, the functional nanoparticles can achieve a good but concentration-dependent lubricating effect in aqueous media. Meanwhile, the mesoporous hollow silica core also endows the nanoparticles with a good drug loading/release capability. The good lubrication properties, along with the controllable drug loading/release capability, makes these functional nanoparticles a possible joint lubricant fluid to be used in arthritis treatment.

a Fabrication of core/shell charged polymer brush-grafted hollow silica nanoparticles (PSPMA-g-HSNPs) as a biomimetic synovial fluid (left) and (right) the corresponding friction curves for steel−steel contact lubricated by pure water and PSPMA-g-HSNP suspensions with different solid contents (0.1, 0.3, and 0.5 wt %). Reprinted with permission from Liu et al.106. Copyright© 2014, American Chemical Society. b Schematic illustration of the fabrication of a PSPMK brush-grafted PNIPAAm microgel as a biomimetic synovial fluid (left) and (right) the coefficients of friction (COF) achieved with NBrMGs, SB-g-PNIPAAm, and SB-g-NBrMGs suspensions at different concentrations under the normal load of 5 N at 25 °C. Reprinted with permission from Liu et al.107. Copyright© 2014, American Chemical Society
Even though the above core/shell charged polymer brush-modified nanoparticles (PSPMA-g-HSNPs) show good water-lubrication properties, the hollow silica core is truly too hard. It can be imaged that such core/shell nanoparticles would be easily broken under high-load conditions because of the high interface contact pressure. As a matter of fact, the main components of natural synovial fluid are hyaluronan, aggrecan, and glycoproteins lubricin, which are all soft but viscoelastic biopolyelectrolytes108. Inspired by this, Liu et al.107 described the combination of polymer brushes and microgels to prepare a kind of soft water-lubrication additive, which may be a promising candidate for simultaneous biomimetic lubrication and arthritis treatment (Fig. 8b). In a typical case, poly(3-sulfopropyl methacrylate potassium salt) (PSPMK) brushes were grafted onto the surface of poly(N-isopropyl acrylamide) (PNIPAAm) microgels, resulting in the preparation of hairy microgels. After employing soft friction pairs, an ultralow coefficient of friction can be achieved. Moreover, the hairy microgels showed a desirable temperature-triggered drug release performance. These soft and charged hairy microgels offer great possibility for designing intelligent synovial fluid. Especially, compared with traditional polymer brush-functionalized hard nanoparticles, soft hairy microgels possess good elastic deformability, and viscoelasticity and can be better adapted to strong mechanical shearing under high-load conditions.
Even though the above hairy microgels can realize good water-lubrication properties, the applied loads under sliding are commonly low because of the low-elastic modulus of soft friction pairs. Recently, Li et al.109 described a strategy to prepare one kind of novel soft/hard combination microsphere, which can act as a good water-lubrication additive in the boundary lubrication regime. In a typical case, amphiphilic polymer nanospheres of poly(3-sulfopropyl methacrylate potassium salt-co-styrene) [P(SPMA-co-St)] were prepared by a simple soap-free emulsion polymerization method. Then, the nanospheres were added into water, and the corresponding tribological properties were investigated on the surface of a Ti6Al4V alloy. Compared with pure PSt microspheres, the soft/hard combination microspheres exhibited good friction-reduction and anti-wear properties. The responsible mechanism is in the soft/hard combination microspheres being able to effectively dissipate the normal stress distribution because of their effective elastic deformation under dynamic shearing processes, which largely restrains the rupture of the microparticles. Swelling of PSPMK polyelectrolyte chains on the surface of the soft/hard combination microspheres provides a good hydration layer to reduce the interface friction, and the typical rolling friction mechanism in the boundary lubrication regime yields good anti-wear properties. Such experimental results suggest a basic design principle for developing functional water-lubrication additives to be used under high-load conditions.
Surface grafting of polymer brushes to improve the lubrication of oil-based systems
The use of surface-grafting polymer brush techniques to improve interface lubricity has not only been limited in aqueous systems but has also been investigated in nonaqueous systems, for example, in oil. Commonly, polymer brushes with long alkyl chains have very good compatibility in oil, while the oil itself has excellent rheological properties. Therefore, one basic strategy to design oil-soluble lubrication interfaces is to combine oleophilic polymer brushes with oils. Oleophilic polymer brushes can swell sufficiently in oils and provide an effective “brush-like” barrier layer at the substrate surface to prevent real contact between two sliding surfaces110. Spencer and colleagues111 grafted a series of alkyl chain-substituted polymethacrylate brushes onto the surface of a silicon wafer by the SI-ATRP technique and then investigated their tribological properties in different solvent environments (good and poor solvents) (Fig. 9a). The experimental results showed that silicon surfaces modified with P12MA and P18MA polymer brushes display significantly lower coefficients of friction compared to those measured on an unmodified silicon wafer or P6MA-coated surface in hexadecane (good solvent). This indicates that the surface-grafting of oil-soluble long alkyl-bearing polymethacrylates brushes onto substrates surface can effectively reduce the coefficient of friction.

a Schematic diagram of bottlebrush-like polymer brush coatings on a substrate (left), and the corresponding lubrication regime (right). Reprinted with permission from Spencer and colleagues111. Copyright© 2012, Springer science. b Synthesis of oil-soluble poly(lauryl methacrylate) (PLMA) brush-grafted silica and titania NPs by surface-initiated atom-transfer radical polymerization (SI-ATRP) and the corresponding friction curves of brush-grafted silica as an oil-soluble lubricant additive. Reprinted with permission from Qu and colleagues112. Copyright© 2016, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
As described above, the surface grafting of oil-soluble polymer brushes can effectively reduce the friction between two sliding surfaces. When grafting oil-soluble polymer brushes onto the surface of nanoparticles, it is highly possible to synthesize excellent lubrication additives for use in oil. For example, Qu et al.112 reported the preparation of one kind of novel oil-soluble hairy nanoparticles (NPs) as highly effective lubricant additives. The as-prepared hairy NPs exhibited exceptional long-term stability in PAO and demonstrated good lubrication properties. In a typical case, they grafted poly-(lauryl methacrylate) (PLMA) brushes onto initiator-modified SiO2 and TiO2 NPs (Fig. 9b) by the SI-ATRP technique. Meanwhile, four PLMA hairy silica NP samples with different molecular weights were prepared. The hairy NPs can be well dispersed in PAO and exhibited exceptional stability in both low-temperature and high-temperature environments for as long as 55 days. Significant reduction of both the COF and wear was observed after adding 1 wt% hairy NPs into PAO. Such results indicate that using oil-miscible polymer brushes to functionalize inorganic NPs additives is highly effective at improving the lubrication and wear resistance of oil systems, which opens opportunities to further improve the durability and efficiency of lubricating oils.
In summary, the surface grafting of hydrophilic polymer brushes can highly improve the lubrication and wear-resistance properties of materials in aqueous systems, while the surface grafting of oil-soluble polymer brushes can effectively separate the contact between two sliding surfaces in oil. Moreover, surface-grafting polymer brushes onto the surface of nanoparticles can produce functional additives for use in both water and oil-based systems. Meanwhile, surface grafting of hydrophilic polymer brushes shows potential advantages in improving the lubrication properties of medical instruments, developing implantable artificial joint materials and preparing functional artificial lubricants. However, the practical problem is that the traditional SI-ATRP technique for grafting polymer brushes always produces residual trace amounts of the metal catalyst (for example Cu2+ ion), which may cause certain biotoxicities in biological systems. Therefore, the remaining challenge is in how to completely remove the residual metal catalyst from the polymer brush network, which is crucial for biologically related applications. Meanwhile, the photoinitiated grafting polymerization technique may be a good choice to address this problem.
Catalyst support in the microreactor immobilization of metal nanoparticle carrier systems
Surface-grafting polymer brushes can provide an effective route for immobilizing metal nanoparticles, which enables the successful preparation of functional polymer-nanoparticles composite catalyst systems. In a typical case, long cationic polyelectrolyte brush chains with anionic counter ions are chemically grafted onto the surfaces of particles. Then, the counter ions are replaced by suitable ions of noble metals. This is followed by reduction using suitable reagents such as NaBH4, and the noble metal nanoparticles can be in situ generated and embedded into the polyelectrolyte brush layer. For example, Yu et al.113 grafted cationic PMETAC polyelectrolyte brushes onto the surface of colloidal polystyrene particles (diameter: ca. 100 nm) and then exchanged the Cl- counter ions with AuCl42-, PdCl42- or PtCl62- (Fig. 10a). After reduction by NaBH4, well-defined metal nanoparticles, such as Au, Pd, and Pt, can be in situ generated in the PMETAC layer. SEM characterization showed that no coagulation took place during the generation of the nanoparticles on the surface of these polystyrene particles. Therefore, polyelectrolyte brushes can work as an ideal carrier for immobilizing nanoparticle catalysts. Meanwhile, polyelectrolyte brushes can not only provide a support template for stabilizing single noble metal nanoparticles but can also be used in the generation of binary mixed metal nanoparticles catalyst systems. Matthias and colleagues114 reported the preparation of a Au@Pt binary alloy nanoparticle catalyst system by using the cationic PMETAC polyelectrolyte brush as a support template (Fig. 10b). The catalytic activity of the polyelectrolyte brush confinement of the Au@Pt nanoparticles was evaluated by applying the oxidation of alcohols to the respective aldehydes. The as-prepared alloy nanoparticles showed very high selectivity toward aldehydes owing to the mild reaction conditions.

a Schematic representation of the formation of metal nanoparticles in spherical polyelectrolyte brushes (SPB). The SPB has a shell of PMETAC, which can exchange with AuCl42-, PdCl42-, or PtCl62-. Reduction of the metal ions by NaBH4 leads to nanosized metal particles bound to the PS surface. Reprinted with permission from Yu et al.113. Copyright© 2007, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. b Schematic representation of the generation of bimetallic Au-Pt nanoparticles inside spherical brush (SPBs) carriers and the corresponding TEM image. Reprinted with permission from Matthias and colleagues114. Copyright© 2008, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. c Schematic representation of anchoring initiators within the nanochannels of the AAO membrane, the surface-initiated polymerization of PMETAC brushes, and in situ immobilization of Au NPs, as well as the corresponding TEM images of PMETAC brush-stabilized Au NPs grafted within the nanochannels of the AAO membrane. Reprinted with permission from Liu et al.117. Copyright© 2013, Royal Society of Chemistry
Moreover, polyelectrolyte brushes can also be grafted onto the inner surface of micro/nanochannels and then loaded with noble metal nanocatalysts, which enables the construction of intelligent flow-catalyst systems and presents fascinating advantages in heterogeneous catalysis115. Meanwhile, a parallel array of straight channels with polyelectrolyte brush-stabilized nanocatalysts offers a high surface area and effective confinement for reagents116. For example, Liu et al.117 reported a method to finely modify a nanoporous anodic aluminum oxide (AAO) film with PMETAC polyelectrolyte brushes by the SI-ATRP technique and the further integration of Au nanocatalysts into the polyelectrolyte brush layer by exchanging the counter ions with AuCl24-, along with subsequent reduction by the NaBH4 reagent (Fig. 10c). The as-prepared AAO membrane can be used as a functional film to realize flow-through catalysis. Experimental results showed that the functional film possessed highly effective catalytic activity and could realize instantaneous separation of products from the reaction system based on the reduction of 4-nitrophenol. Subsequently, Ma et al.118 developed a general method for realizing the asymmetric modification of an AAO membrane by separately grafting anionic PSPMA and cationic PMETAC polyelectrolyte brushes onto each side of the membrane. After in situ counter ions exchange and a following subsequent reduction reaction, polyelectrolyte brush-stabilized Au and Pd nanoparticle catalysts were generated on the inner nanochannel surfaces of each side of the AAO. The as-prepared asymmetric catalyst system showed high flow-through catalytic efficiency in the reduction of 4-nitrophenol. However, further experiments to investigate the continuous flow catalytic capacity based on two-step organic reactions through either nanoparticle (Au or Pd) system were lacking.
As described above, the surface grafting of polyelectrolyte brushes can provide suitable support for the loading of metal nanocatalysts, enabling successful preparation of a “nanoreactor”. However, in most cases, the catalytic activity of the “nanoreactor” is single and not controllable, which limits its possible application as an intelligent catalyst system in smart environments. To address this problem, Lu et al.119 reported the first system that can allow controlling the activity of the nanoparticle catalyst by using the temperature-responsive polymer brushes as a functional layer. In a typical case, cross-linked poly(N-isopropyl acrylamide) (PNIPAm) brushes were grafted onto the poly(styrene) (PS) core, and then Ag nanoparticles were in situ loaded within the polymer layer to construct a responsive nanoreactor (Fig. 11a). Upon suspending the nanoreactor in water at room temperature, the PNIPAm polymer chains would generate swelling, which made the catalyst accessible to reactants at low temperatures. In this case, the Ag nanoparticle catalyst showed very high catalysis activity. Above the LCST of the PNIPAm polymer chains, the polymer network would generate shrinkage, which would prevent the diffused reactants from approaching the Ag catalyst. Correspondingly, the rates of the reactions catalyzed by the nanoparticles slow. Above all, the catalytic activity of the Ag nanoparticle catalyst can be well modulated by temperature.

a Schematic representation of the temperature-responsive behavior of PS-PNIPAAm-Ag composite particles consisting of thermosensitive core–shell particles into which Ag nanoparticles are embedded in the PNIPAAm polymer brush layer. The composite particles can realize thermoresponsive catalytic activity control. Reprinted with permission from Lu et al.119. Copyright© 2006, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. b Schematic representation of the pH-responsive behavior of AuNPs@P2VP-SiO2 composite particles, which can realize controllable catalytic activity. Reprinted with permission from Minko and colleagues120. Copyright© 2008, American Chemical Society. c Schematic diagram illustrating the fabrication of Fe3O4@PND@Au nanocomposites, the reversible swelling/collapse transition of the PND shell at below or above the LCST in an aqueous media, and the magnetically recyclable and thermally adjustable catalysis of 4-NP. Reprinted with permission from Liu et al.121. Copyright© 2015, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
Minko and colleagues120 grafted pH-sensitive P2VP polymer brushes onto the surface of silica NPs using the “grafting to” approach. Subsequently, Au NPs were noncovalently immobilized onto the P2VP shell by electrostatic interactions and van der Waals interactions (Fig. 11b). The pH-driven shrinkage and swelling of the P2VP chains provides good control over the interparticle distance between the Au NPs in the P2VP shell. Correspondingly, changes of the interparticle distance are accompanied by a shift of the maximum wavelength of the surface plasmon absorption peak. As a result, a responsive free-standing nanoparticle plasmonic device capable of an optical response to pH changes in liquid medium was well prepared. Such hierarchically assembled nanostructures can be used as free-standing single-particle sensors in various miniaturized analytical systems.
Given that the metal catalysts surrounding core are not inert silica NPs but functional nanoparticles, for example, magnetic Fe3O4 NPs, a kind of novel magnetically recyclable catalyst can be prepared. For example, Liu et al.121 developed a facile route by which to fabricate a novel nanocomposite catalyst system of Fe3O4@poly[N-isopropyl acrylamide (NIPAM)-co-2-(dimethylamino) ethyl methacrylate (DMAEMA)]@Au(Fe3O4@PND@Au) (Fig. 11c). The prepared Fe3O4@PND@Au nanocomposite can realize magnetically recyclable and thermally tunable catalysis. In a typical case, the thermosensitive PND shell with swelling and collapse features can act as a retractable Au carrier, thereby tuning the aggregation and dispersion of Au nanoparticles, resulting in increases and decreases of the catalytic activity. Concurrent with the thermally tunable catalysis, the magnetic susceptibility of the magnetic core enables the nanocomposites to serve as smart nanoreactors that are magnetically recyclable. This means that the Fe3O4 @PND@Au nanocomposite can be easily recycled by using an external magnet after catalytic reduction. The experimental results show that the catalysts can be successfully recycled for several cycles, and the conversion efficiency remains stable (~95%).
In summary, the surface grafting of polymer brushes can provide an effective route for the immobilization of metal nanocatalysts onto the surface of nanoparticles or channels of porous membranes, which enables the successful preparation of functional composite catalyst systems as “nanoreactors”. Especially, the surface grafting of responsive polymer brushes for the loading of metal nanocatalysts enables easy control of the catalyst activity through applying external stimuli, such as changes in temperature and pH. These functional nanocatalyst systems will present fascinating applications in heterogeneous catalysis. However, one crucial question for these systems is in the cyclic stability of the nanoparticle catalysts in the polymer brushes layer when they encounter harsh reaction conditions, such as high temperatures, strong acids or strong bases and strongly polar organic solvents.
Preparation of functional membranes
Through grafting polymer brushes onto the inner surfaces of membrane channels, it is possible to construct functional interfacial transportation and separation materials. The grafting of polymer brushes onto porous thin films provides a series of important applications, such as controlling ion122,123,124 and molecular transportation125,126,127 and realizing the effective separation of mixed gases. Especially, the use of responsive polymer brushes for interfacial modifications enables the easy construction of stimuli-responsive film materials, of which the ionic, molecular and gas transportation properties can be well controlled. For example, Brunsen et al.128 performed the polymerization of 2-(methacryloyloxy) ethyl phosphate (MEP) monomer units into and onto mesoporous silica thin films to construct an ion-tunable transportation material. Meanwhile, PMEP brushes were used as “gatekeepers” and were located not only on the outer surface of the mesoporous thin films but also in the inner environment of the porous scaffold. In detail, the ion-gate response/operation was based on the protonation and/or chelation of phosphate monomer units of PMEP polymer brushes, which worked as an off-on switch in response to the presence of protons or Ca2+ ions (Fig. 12a). Experimental results show that the integration of stimuli-responsive polymer brushes into nanoscopic supramolecular architectures would provide new routes toward multifunctional biomimetic nanosystems, which display considerable transportation properties similar to those encountered in biological ligand-gated ion channels.

a Schematic depiction of the ionic transport processes taking place in the PMEP brush-modified mesoporous silica films at different pH values. pH < 5, no exclusion of ionic species; pH > 5, permselective transport of cations. Reprinted with permission from Brunsen et al.128. Copyright© 2012, American Chemical Society. b Schematic diagram showing the highly selective transport of neutral molecules through multilayer PSS/PAH films deposited on porous alumina. Reprinted with permission from Liu et al.124. Copyright© 2004, American Chemical Society. c Schematic diagram showing the modification of cross-linked PEGDMA brushes on porous alumina and the corresponding fluxes of different gases through a PEGDMA membrane as a function of the transmembrane pressure drop. Reprinted with permission from Bruening and colleagues129. Copyright© 2003, Elsevier Ltd
Membranes modified with polymer brushes can not only demonstrate possible applications in ion transport but can also be used to transport and separate molecules. Bruening and colleagues124 investigated the transportation of neutral molecules through multilayer polyelectrolyte brush-modified films, which show significant size-based discrimination among organic analytes. In a typical case, the poly(styrene sulfonate) (PSS)/poly(allylamine hydrochloride) (PAH) brush-modified porous alumina membrane exhibited a high selectivity for glucose/sucrose of ~150, while it showed low selectivity for methanol/glycerol of ~2 (Fig. 12b). These functional membrane materials may be applicable in salt/sugar separation or in the removal of organic pollutants from water.
Furthermore, membranes modified with polymer brushes can be used to separate gas mixtures. Bruening and colleagues129 grafted cross-linked poly(ethylene glycol dimethacrylate) (PEGDMA) and linear poly(2-hydroxyethyl methacrylate) (PHEMA) polymer brushes onto a substrate surface to prepare two types of ultrathin (∼50 nm) polymer skin film materials by the SI-ATRP technique. The grafted polymer chains can cover both the inner channels and the outer surface of the porous support without filling the underlying pores. Then, a gas permeation experiment was performed based on these two kinds of ultrathin membrane skin materials. The experimental results showed that the PEGDMA film had a CO2/CH4 selectivity of ∼20 and an O2/N2 selectivity of ∼2, whereas the uncross-linked PHEMA film showed very little selectivity (Fig. 12c). However, the selectivity of the PHEMA film improved significantly after derivatization with fluorinated acid chlorides. These results indicate that the surface grafting of polymer brushes is indeed capable of forming ultrathin, defect-free membrane skins that can potentially be derivatized for specific separations.
In addition, porous membranes modified with a polyelectrolyte brush layer can also be used for biological applications. Dai et al.130 coated porous alumina membranes with a poly(acrylic acid) (PAA) polyelectrolyte brush layer, followed by covalently immobilizing antibodies. The as-prepared functional membrane could be used as a flow-through system for the analysis of fluorescently labeled antigens. In a typical case, the detection limitation in the analysis of Cy5-labeled IgG can achieve 0.02 ng/ml based on the high surface area of the alumina membrane.
As described above, the surface-grafting polymer brush technique can be used for the preparation of functional membranes to realize special functionalities in transportation and separation. Additionally, the surface-grafting polymer brush technique provides an effective means for the easy preparation of bioinspired nanomachines, such as biosensors and molecular filtration and nanofluidic devices. For example, upon grafting polymer brushes onto inner surface of an artificial single nanochannel, the resulting system can be used as an ideal candidate for mimicking the ionic transport process of organisms in nature97. Especially, the surface grafting of responsive polymer brushes onto an artificial single nanochannel enables the making of intelligent artificial nanochannel devices with similar functions to those of natural cell membranes.
Inspired by the switchable ionic current feature based on the pH-dependent transport function in living organisms, Azzaroni and colleagues131 incorporated pH-responsive poly(4-vinylpyridine) brushes into single solid-state PET nanochannels. The resulting nanochannel devices can realize controllable ion transportation properties and switchable ionic current features by manipulating the proton concentration in the surrounding environment (Fig. 13a). As a result, the electronic readout of the device can be switched between the “on” and “off” states in response to pH changes of the media. Based on the same design concept, Yameen et al.132 grafted pH-responsive poly(2-(methacryloyloxy) ethyl phosphate) (PMEP) brushes onto single conical PET nanopores by using the photoinitiated polymerization technique. Based on the pH-responsive feature of the PMEP brush (pK1 ~4.5 and pK2 ~7.7), the PMPE-modified nanopore displayed a low-conductance, nonpermselective state below pK1, while it presented high transmembrane ionic currents above pK2 (Fig. 13b). Finally, the experimental results showed that the modified nanopore exhibited a well-defined tunable rectifying property in agreement with the pH-dependence of the average charge of the MEP units. This work opens a new door for preparing switchable nanopore machineries capable of generating multiple protonation states.

a Schematic diagram showing the cylindrical nanochannel grafted with poly(4-vinylpyridine) brushes and reversible variation of the charge state/wettability for a PVP brush-modified nanochannel upon changing the environmental pH between 2 and 10. Reprinted with permission from Azzaroni and colleagues131. Copyright. 2009, American Chemical Society. b Schematic diagram of a conical nanopore modified with PMEP polymer brushes at different pH values (using 0.1 M KCl as the electrolyte). Reprinted with permission from Yameen et al.132. Copyright© 2010, Royal Society of Chemistry. c Constructing a biomimetic asymmetric responsive single nanochannel system by grafting temperature-responsive PNIPAAm polymer brushes onto one side of the nanochannel and pH-responsive PAAc polymer brushes onto the other side of the nanochannel to realize asymmetric responsive ionic transport properties in this nanochannel system. Reprinted with permission from Jiang and colleagues134. Copyright. 2010, American Chemical Society
However, biological ion channels in nature are responsive not only to one kind of stimulus but to multistimuli. Based on this fact, Guo et al.133 grafted temperature- and pH-dual-responsive poly(N-isopropyl acrylamide-co-acrylic acid) brushes onto the wall of a cone-shaped nanopore, resulting in the successful preparation of a dual-functional nanofluidic device. The ion conducting state of the device can be well controlled by simultaneously changing the temperature and pH value of the media. The controllable ion conducting state of the nanopore device results from the temperature- or pH-triggered conformational transition of the attached copolymer brush chains. Therefore, it can be easily imagined that the surface grafting of other stimuli-responsive polymer brushes onto the nanopore can enable the design of smart multiresponsive functional nanofluidic systems resembling those of “live” creatures in nature. Subsequently, Jiang and colleagues134 developed one kind of new asymmetric responsive nanochannel device system, which provides simultaneous control over both the pH- and temperature-tunable asymmetric ionic transport properties (Fig. 13c). This system, as a good example, could potentially be used in further experimental and theoretical studies to develop more complex “smart” nanofluidic device systems.
In summary, the surface grafting of polymer brushes onto the inner surface of membrane channels enables the construction of functional materials for a series of important applications, such as controlling ion and molecular transport and realizing the effective separation of mixed gases. Especially, grafting of responsive polymer brushes onto the wall of a cone-shaped nanopore is highly applicable in creating functional nanofluidic devices. Meanwhile, the electronic readout of the nanodevice can be switched between the “on” and “off” states in response to stimuli changes in the media. A key challenge in this technique is how to finely/selectively control the modification of membrane channels with polymer brushes, rather than covering the channels and surface completely. Therefore, necessary technical means should be developed to address this problem.
Anti-biofouling
Resistance to nonspecific protein adsorption
The surface grafting of hydrophilic polymer brushes onto materials is an effective route by which to prevent nonspecific protein adsorption and cell adhesion, which has a series of applications. Surfaces modified with poly(ethylene glycol) (PEG) brushes have been extensively studied and used for resistance to nonspecific protein adsorption. For example, Chilkoti and colleagues135 grafted (EG)n-functionalized polymer brushes with tunable thickness onto a substrate surface by the SIP technique. The as-prepared surface exhibited very weak adsorption of proteins and maintained effective cell resistance for up to a month in cell culture media. Meanwhile, the steric exclusion effect was considered one of the key reasons behind the PEG polymers resisting protein adsorption136. However, some reports indicated that the PEG group would decompose in the presence of oxygen and transition metal ions, and such phenomenon was found in most biochemically relevant solutions137,138,139, which prevents the real application of this system. To address this problem, Zheng et al.140 developed poly(HPMA) brush systems with different film thicknesses and surface roughness values by using the improved two-step SI-ATRP method. The anti-fouling properties of the as-prepared surfaces were examined in single-protein solutions, diluted and undiluted human blood plasma and serum, and cell adhesion culture. Experimental results showed that the poly(HPMA) brushes can exhibit high resistance to nonspecific protein adsorption within a range of film thicknesses. This work provides an effective alternative ATRP method for generating stable anti-fouling materials based on poly(HPMA) brushes, rather than biodegradable PEG, for biomedical applications.
In addition to neutral polymer brushes such as PEG and PHPMA, charged polymer brushes have also been extensively studied as novel anti-fouling materials. For example, phosphorylcholine (PC)-based polymers or surfaces can effectively reduce protein adsorption141. They are considered biomimetic fouling-resistant materials since they contain phosphorylcholine headgroups, which are found in the outside layer of cell membranes. The strong hydration of a PC-modified material allows proteins to contact the surface reversibly without conformational changes142,143. Moreover, the flexibility and mobility of the PC group may play critical roles in weakening protein-surface interactions144,145. Therefore, it can be imagined that the grafting of PC-liked polymer brushes onto substrate surfaces can highly improve the anti-fouling properties146,147. Based on this, zwitterionic polymer brushes have been extensively synthesized and then grafted onto the surfaces of materials to investigate the protein resistance properties.
Brash and colleagues148 grafted poly(2-methacryloyloxyethyl phosphorylcholine) (PMPC) brushes at different grafting densities and with different chain lengths onto silicon wafers by SI-ATRP. The effects of the PMPC chain length on fibrinogen and lysozyme adsorption were systematically studied in TBS buffer solution. The results indicated that the adsorption of both kinds of proteins onto the poly(MPC)-grafted surfaces was greatly reduced comparable to that onto the unmodified silicon, and the adsorption was obviously weakened with increasing chain lengths of the PMPC brushes. Furthermore, the experimental results showed that the sizes and charges of proteins were independent of the resistance to adsorption on PMPC-grafted surfaces. Yoshimoto et al.149 grafted poly(2-(methacryloyloxy) ethyl phosphorylcholine) (PMPC) brushes onto a gold surface by the “grafting to” method using a monosulfanyl-terminated polymer. The experimental results showed that the amount of BSA adsorption on the PMPC-modified surface was significantly decreased for thicker PMPC layers; thus, the number of MPC units on the gold surface appears to be an important factor in controlling the protein adsorption.
In addition to phosphorylcholine (PC)-based polymer brushes (PMPC), other kinds of zwitterionic polymer brushes have also been grafted onto substrate surfaces to investigate the resistance to nonspecific proteins adsorption. For example, Jiang and colleagues150 grafted poly(sulfobetaine methacrylate) (PSBMA) brushes onto a gold surface by using atom-transfer radical polymerization (ATRP). The experimental results demonstrated that the PSBMA-grafted surface could highly resist nonspecific protein adsorption, and polymer brush layers with a wide range of thicknesses all had excellent protein-resistant properties. Following this finding, Jiang and colleagues57 prepared an interpenetrating polymer network (IPNs) film by modifying segmented polyurethane (SPU) with cross-linked PSBMA brushes. The as-prepared IPN films could effectively resist nonspecific protein adsorption. Additionally, it can be imagined that the mechanical stability of PSBMA brushes can also be enhanced based on chemical interpenetration in the SPU films, which implies special applications of the film in harsh environments. Moreover, Zhang et al.151 developed a dual-functional biocompatible material based on zwitterionic poly(carboxybetaine methacrylate) (PCBMA) brushes. The dual-functional property is unique to the carboxybetaine moieties in PCBMA and is not found in other nonfouling moieties. After grafting the PCBMA brushes onto the gold surface, the modified surface can largely prevent the nonspecific adsorption of three typical test proteins, which are fibrinogen, lysozymes, and human chorionic gonadotropin (hCG).
As described above, both neutral and the zwitterionic polymer brushes can effectively resist the nonspecific adsorption of proteins. However, a basic comparison of the anti-fouling properties among these kinds of polymer brushes is lacking. Jiang and colleagues25 prepared three kinds of hydrophilic surfaces by separately grafting POEGMA, PSBMA, and PCBMA brushes and then studied their interactions with human serum and plasma. In a typical case, both low concentrations (10%) and high concentrations (100%) of human serum and plasma solutions were chosen as testing proteins, with the experiments monitored by a custom-built SPR sensor. The experimental results showed that PCBMA-modified surface had improved resistance to nonspecific protein adsorption from human serum and plasma over the POEGMA and PSBMA surfaces (Fig. 14a). The greater improvement of PCBMA over that of PSBMA may come from the shorter distance between the charged groups on the polymer chains, resulting in a stronger hydration layer on the gold surface. Correspondingly, the experimental results showed that the zwitterionic polymer brush-modified surface demonstrated improved resistance to nonspecific protein adsorption, which was comparable to that from neutral polymer brushes and SAMs and may have resulted from the increased hydration degree.

a The relationship between the hydration degree and the protein resistance capacity for poly(oligo(ethylene glycol)) methacrylate (POEGMA), polymer sulfobetaine methacrylate (PSBMA) and poly(carboxybetaine methacrylate) (PCBMA) brushes and the corresponding nonspecific adsorptions of 10% human serum in PBS and 100% human serum on a series of surfaces. Reprinted with permission from Ladd et al.25. Copyright© 2008, American Chemical Society. b Schematic diagram of selective protein adsorption on a charge-reversible surface under different pH values and an SPR sensogram showing pepsin adsorption at pH-3 and release by running PBS (pH 7.4) over the polymer brush surface. Reprinted with permission from Sundaram et al.152. Copyright© 2014, Royal Society of Chemistry
However, conventional zwitterionic polymer brushes commonly have a permanent charge center, while neutral polymer brushes always maintain a stable hydration degree, making it impossible to realize the dynamic control of nonspecific protein adsorption. Based on this, Jiang and colleagues152 presented a rationally designed polymer with a tertiary amine and a carboxylic acid, which is capable of reversible switching among the three different charged states of cationic, zwitterionic and anionic and, importantly, of maintaining the zwitterionic state under physiological pH conditions (Fig. 14b). As a result, oppositely charged proteins can preferentially adsorb onto a charged substrate surface selectively and then be completely removed by switching the surface to the zwitterionic state. Furthermore, the experimental result showed the zwitterionic state can effectively resist nonspecific protein adsorption from undiluted blood plasma and serum under physiological conditions. The charge switching ability, along with the ultralow fouling properties at physiological pH, makes this material desirable for specialized applications. Additionally, Okano and colleagues153 prepared a functional silica bead material by combining thermoresponsive poly(IPAAm-co-AAc-co-BMA) brushes. The as-prepared material can selectively adsorb the target protein through thermally modulated electrostatic and hydrophobic interactions. This thermally modulated adsorption/desorption property of proteins will be further applicable to many other protein purification processes.
Antibacterial
Even though hydrophilic surfaces modified with polymer brushes can effectively resist the adsorption of nonspecific proteins, can such surfaces also be effective in preventing the undesirable adhesion of bacteria or the formation of biofilms? Commonly, polymer brushes with positively charged quaternary ammonium groups at physiological pH have been widely used as effective antibacterial materials. In the case of polycationic polymer brushes, interaction with the negatively charged cell surface is expected to take place to a greater extent because of the much higher charge density carried by the surface-grafted polymer brushes.
Based on this strategy, researchers have performed many works to investigate the antibacterial behavior of materials functionalized with polymer brushes. For example, Matyjaszewski and coworkers154 found that poly(quaternary ammonium) brushes can be used as antimicrobial polymeric coatings on inorganic surfaces. Meanwhile, poly(2-(dimethylamino) ethyl methacrylate) (PDMAEMA) brushes were quaternized with alkyl bromides to obtain quaternary ammonium groups, resulting in a surface with excellent antimicrobial activity. Especially, the experimental results indicated that the charge density of PDMAEMA brushes was an important element in achieving maximum kill efficiency. Additionally, Luzinov and coworkers studied the use of mixed polymer brushes to control the adhesion of bacteria onto surfaces26. In a typical case, the substrate surface was modified with bacteria-repelling PEG brushes and positively charged quaternized poly(vinylpyridine) brushes. The experimental results demonstrated that the mixed polymer brushes could generate a 400-fold difference in the adsorption of S. aureus, which will allow the design of substrates with tunable bacteria adsorption properties.
In addition to the grafting of single polycationic polymer brushes, surface grafting of zwitterionic polymer brushes can also be a good choice for engineering excellent antibacterial materials. For example, Jiang and colleagues155 studied the antibacterial properties of a PSBMA brush-modified surface. In a typical case, short-term (3 h) and long-term (24 or 48 h) adsorption tests for two bacterial species on the modified surface were conducted using a laminar flow chamber. Correspondingly, a P(OEGMA) brush-grafted surface and SAMs-modified surface were also used for comparison. The experimental results showed that the PSBMA brush-grafted surface could effectively reduce the short-term adhesion of S. epidermidis and P. aeruginosa relative to that on bare glass. In the long-term investigation of biofilm formation, qualitative images showed that PSBMA brushes could dramatically reduce the biofilm formation of S. epidermidis and P. aeruginosa (Fig. 15a). These results suggested that zwitterionic PSBMA brushes are an excellent anti-fouling material for resisting bacterial adhesion and biofilm formation. Further, Cheng et al.156 investigated the resistance to long-term bacterial biofilm formation of PCBMA brush-grafted surfaces. In a typical case, the long-term (over 24 h) colonization of two bacterial strains on a PCBMA brush-grafted surface was investigated using a parallel flow cell under a wide temperature range, while bare glass was used as the control. The experimental results showed that the PCBMA brush-modified surface could reduce the long-term biofilm formation of P. aeruginosa at up to 240 h by 95% at 25 °C and at 64 h by 93% at 37 °C (Fig. 15b). The significant resistance to bacterial biofilm formation makes the PCBMA coating a very promising material for biomedical and industrial applications. Moreover, the grafting of active antimicrobial agents onto the surface of polymer brushes can also yield surfaces with excellent antibacterial properties. For example, antimicrobial peptides (AMPs) are commonly attached to polymer brushes to create surfaces with efficient antibacterial properties157,158.

a Schematic diagram showing the surface grafting of zwitterionic PSBMA polymer brushes onto a substrate surface (left), epidermidis attachment on various surfaces at 3 h (middle), and fluorescence microscopy graphs of S. epidermidis attachment on PSBMA-grafted surfaces at 48 h (right). Reprinted with permission from Cheng et al.155. Copyright© 2007, Elsevier Ltd. b Schematic diagram showing the surface grafting of zwitterionic PCBMA polymer brushes onto a glass surface (left) and representative fluorescence microscopy graphs of P. aeruginosa attachment on unmodified glass (middle) and the PCBMA brush-grafted surface at 48 h and 25 °C (right). Reprinted with permission from Cheng et al.156. Copyright© 2009, Elsevier Ltd
Marine anti-fouling
Biofouling159 has become a widespread problem in the marine industry for both military and commercial vessels, with effects, including the increase of fuel consumption, dry-docking cleaning expenses, loss of hull strength, biocorrosion, etc. A number of functional anti-biofouling (AF) materials have been developed in recent years. Meanwhile, learning from nature seems to provide an effective strategy for developing ideal marine anti-fouling materials. As a matter of fact, fishes in the sea are almost never contaminated by marine microorganisms. The most intuitive reason responsible for this is that the surface of fishes is hydrophilic, soft and slippery. Inspired by fishes, a series of approaches have been developed to create a hydrophilic surface to resist the biofouling in marine settings. The surface grafting of hydrophilic polymer brushes onto material surfaces was proven as an effective means for developing functional marine anti-biofouling materials160,161.
Wan et al.162 grafted hydrophilic poly(3-sulfopropyl methacrylate) (PSPMA) brushes onto a biomimetic structural surface replicated from natural Trifolium leaf. Subsequently, settlement assays with two species of microalgae in static culture were employed to investigate the anti-fouling properties of the as-prepared material. The experimental results indicated that both the surface microstructures and chemical composition could effectively improve the marine anti-fouling properties (Fig. 16a). Correspondingly, the synergy of the structure and surface composition provides a promising strategy for designing environmentally friendly marine AF coatings. Based on the same design principle, Ma et al.163 grafted hydrophilic polyelectrolyte brushes (PSPMA) onto four kinds of gecko-inspired fibrillar arrays with different surface geometries via SI-ATRP. Then, the anti-biofouling properties of the four PSPMA-grafted arrays were evaluated by employing two kinds of algae cells, Chlorella sp. and Navicula sp. The experimental results showed that these PP-PSPMA arrays could mitigate biofouling effectively. Subsequently, Du et al.66 fabricated underwater micro/nanobrush surfaces by grafting hydrophilic polymer brushes onto soft hydrogel nanofibers. The experimental results showed that the PSPMA-modified micro/nanobrush dual-structure surface had excellent performance against algal attachment, which could provide guidance in the design of eco-friendly anti-fouling materials for use in marine environments.

a Construction of a multiscale anti-fouling (AF) surface by grafting a series of polyelectrolyte brushes (PSPMA. PMETAC, PMAA, PSBMA) onto a Trifolium leaf-inspired PDMS piece and the corresponding statistics of cell/spore attachment on the PSPMA-grafted surface in a static model. Reprinted with permission from Wan et al.162. Copyright© 2012, American Chemical Society. b Construction of a multiscale hairy surface by grafting PSPMA polymer brushes onto rabbit fur for investigating the resulting AF/FR properties in a dynamic model. Reprinted with permission from Wan et al.164. Copyright© 2013, Royal Society of Chemistry. c Schematic of the anti-fouling mechanism on a PSPMA-grafted substrate and the corresponding photos of marine anti-fouling on a control sample substrate and a PSPMA-grafted substrate after immersion into the South China Sea for a month
However, natural anti-biofouling surfaces in marine environments commonly encounter dynamic fluid flushing. Many marine organisms attached to reefs, such as sea anemones, have long, thin and hairy tentacles at a high density, which can sway back and forth in the dynamic sea water and suffer no biofouling at all. Therefore, investigating the attachment of marine organisms onto hydrophilic material surfaces under a static culture mode is not persuasive. Correspondingly, a dynamic culture mode of algal attachment was suggested, which is highly effective for developing long-lasting anti-fouling materials. Based on this purpose, Wan et al.164 grafted poly-sulfopropyl methacrylate (PSPMA) brushes onto natural fur with a high density of soft hair fibers by SI-ATRP. Subsequently, series of laboratory static and dynamic settlement assays with microalgae and zoospores were carried out to systematically investigate the relationship among the modified PSPMA brushes, the density/shape/length of the hair fibers and the anti-fouling properties. The experimental results indicated that the PSPMA brush-modified hairy surface could be effective against the settlement of microalgae/zoospores in different bioassays, especially in dynamic settlement assays (Fig. 16b). In general, hairy surfaces with higher fiber densities and larger fiber lengths tend to display lower settlement of microalgae/zoospores, while hydrophilic PSPMA brushes on these surfaces can further improve the anti-fouling properties.
Furthermore, the surface grafting of hydrophilic poly (ionic liquid) brushes has also been proven as an effective route by which to improve the marine anti-fouling properties of materials. Some previous studies showed that attaching ionic liquid moieties to polymer brush chains was effective for developing novel antimicrobial agents and anti-biofouling materials165,166. For example, Ye et al.167 grafted high-density poly(ionic liquid) brushes onto material surfaces via surface-initiated ring-opening metathesis polymerization (SI-ROMP). The as-prepared materials possessed excellent antibacterial and anti-biofouling properties. Zhao et al.168 grafted zwitterionic polymer brushes based on sulfobetaine vinylimidazole (pSBVI) onto silicon substrates by electrochemical surface-initiated atomic-transfer radical polymerization (e-SI-ATRP). The as-prepared functional material exhibited excellent anti-fouling activities because of the presence of the two bactericidal functional groups, imidazolium and sulfonate. Subsequently, Zhao et al.169 reported the synergistic anti-fouling effects of nonionic, cationic and anionic compounds in combination with a poly(ionic liquid) toward suppressing marine fouling. Meanwhile, nonionic, cationic and anionic compounds were grafted onto substrate surfaces by a light-induced click reaction, while poly(ionic liquid) brushes were grafted onto the as-prepared surfaces via surface-initiated ring-opening metathesis polymerization (SI-ROMP). Finally, the researchers obtained surfaces with binary functional components. The anti-fouling properties of the sole component- and binary components-modified surfaces were evaluated by an algae adhesion assay using Navicula spores and Dunaliella tertiolecta. The anti-fouling testing results showed that the binary compound-modified substrate surface exhibited better anti-adsorption performance than did the sole component-modified substrate, owing to the synergistic anti-fouling effect of the binary components.
As reported above, the surface grafting of hydrophilic polymer brushes can effectively improve the anti-biofouling properties of materials. However, the grafted polymer brush layer is commonly too thin and does not have in-depth attachment. Additionally, the grafted polymer brushes are easily dissociated from the substrate surface because of the unavoidable degradation processes in the marine environment. This problem limits the real application of polymer brushes in marine environments. To address this problem, Zhou and colleagues170 proposed a novel subsurface-initiated atom-transfer radical polymerization (sSI-ATRP) method to construct a thick, embedded, robust and renewable polymer brush composite layer on the substrate surface (Fig. 16c). The thickness of the polymer brush-modified composite layer can reach tens of micrometers. The experimental results indicated that the PSPMK polymer brush-modified composite layer can provide extremely good anti-fouling properties, even after 30 days of culture in a real marine environment. By contrast, the control surface was very easily contaminated by marine organisms. This study provides a facile route by which to construct a lasting marine anti-fouling coating by the subsurface grafting polymer brush technique.
In summary, as reviewed above, the surface grafting of hydrophilic polymer brushes can effectively improve the anti-fouling properties of materials, including the resistance to nonspecific protein adsorption and to the undesirable adhesion of bacteria or the formation of biofilms and can slow marine biofouling. Meanwhile, grafting of ionic and zwitterionic polymer brushes onto material surfaces can highly improve blood compatibility, which exhibits potential applications in the biomedical field. By contrast, the authors think that the surface-grafting polymer brush technique is not a good choice for developing functional materials to resist marine biofouling because of the high cost of preparing a brushed surface. However, using such a technique is highly available to simulate and understand the natural anti-fouling mechanisms of marine organisms, which is especially helpful in the development of functional marine anti-fouling coatings. Moreover, the biodegradability of polymer brush-based materials in biological media or marine environments is also a tricky problem, which needs to be systematically evaluated.
Controlling cell behavior
Polymer brushes have also been extensively employed to control cell adhesion and proliferation behaviors on material surfaces171,172. Meanwhile, constructing intelligent material surfaces by the grafting of responsive polymer brushes to investigate cell adhesion behavior is very attractive. In this regard, thermoresponsive polymer brushes are especially attractive173,174. For example, Okano’s group developed a series of thermoresponsive functional surfaces by grafting poly(N-isopropyl acrylamide) (PNIPAm) brushes, followed by terminal modification, and the as-prepared surfaces could be used to realize cell adhesion below the LCST and detachment above the LCST175. However, some reports indicated that PNIPAm polymer brushes may induce cellular cytotoxicity upon switching from the hydrophilic state to the hydrophobic state176. To address this problem, copolymer brushes of poly(2-(2-methoxyethoxy) ethyl methacrylate) (PMEO2MA) and poly(ligo(ethylene glycol) methacrylate) (POEGMA) have been developed as interesting biocompatible alternatives to PNIPAm brushes. For example, Laschewsky and coworkers15 developed a poly(MEO2MA-co-OEGMA) copolymer brush-modified thermoresponsive surface. The prepared surface exhibited tunable attachment, proliferation and detachment of 3T3 mouse fibroblasts by temperature cycling around the LCST of the copolymer brushes.
To further improve the bioactivity and functionality of polymer brush-modified materials, biomacromolecules, such as proteins and peptides, are commonly grafted onto the brushed chains to control the cell adhesion behavior177,178,179,180,181. Incorporating functional bioconjugate groups on polymer brushes can induce cell differentiation toward determined tissue types, which enables mimicking the ECM more closely. For example, Wei and coworkers179 described the modification of titanium surfaces with poly(OEGMA-r-HEMA) brushes. Subsequently, conjugating fibronectin (FN) and recombinant human bone morphogenetic protein-2 (rhBMP-2) onto the surface of the polymer brushes enables the induction of effective adhesion of MC3T3 cells, which endows the titanium surface with good osteogenesis capacity (Fig. 17a). Moreover, Klok and his collaborators29 explored the modification of polymer brushes with short peptide ligands on the surface of blood-contacting materials to promote endothelialization. In a typical case, poly(2-hydroxyethyl methacrylate) (PHEMA) or poly(poly(ethylene glycol) methacrylate) (PPEGMA) brushes were separately grafted onto the substrate surface. Then, the exposed hydroxyl groups of the polymer brushes can be further conjugated with RGD-containing peptide ligands. The experimental results showed that human umbilical vascular endothelial cells (HUVECs) were able to adhere and spread effectively on the RGD-modified surface, as well as to retain homeostasis upon encountering shear stress such as real arterial blood flow (Fig. 17b).

a Schematic diagram illustrating osteoblast attachment onto fibronectin (FN)- and recombinant human bone morphogenetic protein-2 (rhBMP-2)-conjugated poly(OEGMA-r-HEMA) brushes grafted onto titanium surfaces. Reprinted with permission from Ren et al.179. Copyright© 2011, American Chemical Society. b Schematic diagram of RGD-functionalized polymer brushes and a fluorescence micrograph of HUVECs on GGGRGDS-functionalized 20 nm-thick PHEMA, PPEGMA6 and PPEGMA10 polymer brushes. Reprinted with permission from Tugulu et al.29. Copyright© 2007, Elsevier Ltd
Not only the chemical components but also the surface topography of the substrates can highly affect the cell adhesion behavior184. For example, Zheng and colleagues185,186 developed a series of biomimicking patterned polymer brush multiscale systems, which can not only control cell adhesion and orientation behavior but also allow reversible detachment of the cells upon exposure to external stimuli. Meanwhile, the grafting of functional polymer brushes onto rough biomaterial surfaces can further improve the blood compatibility of materials or affect the cell adhesion behavior. For example, Wang and colleagues182 grafted thermally responsive PNIPAAm polymer brushes onto silicon nanowire arrays (SiNWAs) by SI-ATRP and then investigated the interaction between this functional material surface and platelets in vitro. The experimental results showed that the prepared functional surface (SiNWA-PNIPAAm) could largely reduce platelet adhesion both below and above the LCST, while the smooth PNIPAAm surface exhibited anti-adhesion to platelets only below the LCST (Fig. 18a). Such functional material can be used in the fields of biomaterials and biomedicine. Subsequently, Yu and coworkers32 also developed such a functional composite surface by grafting thermally responsive PNIPAAm polymer brushes onto SiNWS, followed by the conjugation of a cell capture agent, biotinylated anti-EpCAM, onto the brushes. The as-prepared functional material demonstrated highly efficient CTC capture and could realize the reversible capture/release of different kinds of targeted cancer cells above and below the LCST of the PNIPAAm brushes (Fig. 18b). However, this kind of functional material is only responsive to a single temperature stimulus to realize the reversible capture and release of targeted cancer cells. Based on this finding, Wang and colleagues183 prepared a pH- and glucose-dual-responsive composite surface by grafting poly (acrylamidophenylboronic acid) (polyAAPBA) brushes onto an aligned silicon nanowire (SiNW) array. The as-prepared surface could realize reversibly capture and release targeted cancer cells by precisely controlling the pH and glucose concentration, exhibiting dual-stimuli responsiveness (Fig. 18c). This dual-responsive surface has significant biomedical and biological applications, including in cell-based diagnostics and in vivo drug delivery.

a Investigation of platelet adhesion onto different surfaces (Si; SiNWA, Si-PNIPAAm, SiNWA-PNIPAAm) at 20 °C and 37 °C and the corresponding SEM morphology. Reprinted with permission from Wang and colleagues182. Copyright© 2009, American Chemical Society. b Schematic illustration showing the dynamic capture and release of CTCs by using a capture agent-functionalized polymer brush substrate (biotin-PNIPAAm-SiNWS). Quantitative evaluations of the capturing capacity of biotin-PNIPAAm-SiNWS for different kinds of cells in high/low-temperature environments. Reprinted with permission from Wang and colleagues32. Copyright© 2013, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. c Schematic diagram of the pH and glucose-dual-responsive surface (PAAPBA-SiNWS) for realizing controllable cell capture and release. Reprinted with permission from Wang and colleagues183. Copyright© 2013, American Chemical Society
In summary, the surface grafting of functional polymer brushes can be used to control cell adhesion behavior. The material surfaces prepared by the grafting of responsive polymer brushes can exhibit tunable attachment and detachment behaviors toward target cells by temperature cycling around the LCST. Incorporating functional biomacromolecules, such as proteins and peptides, onto the polymer brush chains further improves the bioactivity and functionality of the material surfaces. Especially, the conjugation of a cell capture agent onto the responsive polymer brushes enables obtaining highly efficient CTC capture and can realize reversible capture/release for different kinds of targeted cancer cells above and below the LCST.
Actuation
Inspired by actuation mechanisms from nature, the surface grafting of responsive polymer brushes onto material surfaces enables the easy design of intelligent actuation systems7, which are highly conducive converting physical or chemical signals into macroscopic movements. Responsive brushes can always undergo reversible conformation changes of the polymer chains under external stimuli, inducing an obvious shape change of the as-prepared actuation systems at different scales187,188,189. For example, the nanoactuation of microcantilevers using responsive polymer brushes has attracted considerable interest due to their potential as “soft” nanoactuators190. As reported, conformational changes of polymer brush chains can provide a good route toward the actuation of nanoscale objects191,192. For example, Minko and colleagues193 reported the actuation of gold nanoparticles using pH-sensitive poly(2-vinylpyridine) (P2VP) polymer brushes based on surface plasmon resonance spectroscopy.
When functional polymer brushes are grafted onto microcantilevers and then exposed to different triggers, this can induce dynamic bending of the cantilevers. For example, Zhou et al.194 grafted responsive polymer brushes onto an atomic force microscopy (AFM) cantilever and then observed the bending behavior of the cantilever resulting from the swelling pressure of the polymer brushes. In a typical case, polymethacryloyl ethylene phosphate (PMEP) brushes were selectively grafted onto one side of the cantilever via SI-ATRP, which could induce reversible actuation of the cantilevers after immersing the cantilever into solutions of different ionic strengths (Fig. 19a). Furthermore, the same group employed this method to develop a new electroactuation system by grafting cationic polyelectrolyte brushes onto one side of microcantilevers (Fig. 19b). By applying alternating positive and negative biases to the polyelectrolyte brush-modified cantilever, obvious surface actuation stresses were generated. Moreover, Berger and coworkers195 established a micromechanical cantilever system by the grafting of solvent-responsive polymer brushes, and the stress produced on the modified cantilevers could be used as an effective analytical tool to determine solvent compositions. Zauscher and colleagues196 grafted poly[(N-isopropyl acrylamide)-co-(N-vinylimidazole)] copolymer brushes onto a cantilever and then observed the dual-responsive actuation from both solvent and pH. Meanwhile, the bending behavior of microcantilevers induced by the media responsiveness of polymer brushes allows the sensitive detection of surface stresses, which has been used to study the surface adsorption of monolayers197 and interaction between molecules139,198.

a pH-responsive bending of a PMEP brush-modified cantilever and the corresponding conformation states of the polymer chains. Reprinted with permission from Zhou et al.194. Copyright© 2006 American Chemical Society. b Dynamic actuation of a PMETAC brush-modified cantilever in response to applied bias, with the initiator-modified cantilever as a comparison. Reprinted with permission from Zhou et al.203. Copyright© 2008, American Chemical Society. c During topography switching accompanied by changes in the interfacial energy, the ‘arms’’ of the brush grasp the nano cargo and move it along a surface. Reprinted with permission from Rühe and Santer201. Copyright© 2004, Elsevier Ltd. d Dynamically simulating the elongation/contraction process of a caterpillar using PSPMA brush-modified wrinkled PDMS as a soft actuator, which can generate fast bending in response to water or moisture. Reprinted with permission from Zhou and colleagues202. Copyright© 2015, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
Furthermore, some studies have indicated that the phase transitions of copolymer brushes in solvent can induce local changes of the surface microlandscape34. Such changes can be used to grasp and release nano-objects and move them across a surface199,200, a process, which is highly similar to the nanomechanical motion behaviors of natural systems. For example, Rühe and Santer201 covalently attached p(MMA-b-GMA) and p(BnMA-b-S) diblock-copolymer brushes onto the substrate surface. The mixed brushes showed obvious nanophase separation in a selective solvent, appearing in a ‘crater’’-like pattern. The pattern could be switched into a flat, featureless state by exposing the brushes to a solvent good for both blocks. Finally, such solvent-responsive behavior of diblock-copolymer brushes can be successfully used to drive appropriately nanosized particles across the surface (Fig. 19c). Yu et al.72 covalently attached nanoparticles onto the ends of PS-b-(PMMA-co-PCdMA) brushes, which could reversibly control the vertical, out-of-plane nanoparticle displacement after exposure to a selective solvent.
Applying polymer brushes to develop actuation systems is not only limited to the microscale but has also attracted great attention for developing macroscopic actuation systems. For example, Li et al.202 reported a novel actuator based on a wrinkled PDMS elastomer covered with hydroresponsive polyelectrolyte brushes of poly (sulfopropyl methacrylate) (PSPMA). Typically, the PSPMA polyelectrolyte brushes demonstrated the collapsed state, but they swelled in response to increasing air humidity, leading to a lateral pressure difference, which caused the elastomer to bend. Meanwhile, the cyclic bending process can mimic the movement behavior of caterpillars, which move by alternatingly expanding and contracting their soft bodies. Correspondingly, the bending direction of the actuator can be manipulated by the wrinkles featured on the PDMS substrate, which enable the actuator to generate responsive self-folding into any complex structures (Fig. 17d). This polymer brush-assisted actuator shows many potential applications, including in actuators, cell encapsulation, artificial muscles, and “soft robotics”.
In summary, the grafting of responsive polymer brushes onto substrate surface enables the development of intelligent nanoactuation systems for transporting nanoparticles in “soft” nanomechanics. After selectively grafting functional polymer brushes onto a microcantilever and then exposing it to different triggers, the modified microcantilever can generate dynamic bending. This responsive actuation feature can be used to determine solvent compositions, study surface adsorption, and investigate interactions between molecules. Even so, using the SPB technique to develop macro actuation systems for possible applications in the real world is only at the conceptual level. The existing barrier for this technique is that the actuation stress of polymer brush-based system is very small. Moreover, the complex grafting process of polymer brushes largely limits extensive applications of such kinds of actuation materials.
Preparation of functional electronic devices
Surface grafting of polymer brushes can also be used as an important assistance means to change the electrical performance of materials. Especially, it has been an important chemical approach by which to construct soft metal electrodes for flexible and wearable electronics204,205,206. Meanwhile, polymer brush-assisted metal deposition (PAMD) technology has been developed to prepare flexible, foldable, stretchable, compressible, and wearable metal conductors207. The key technique of PAMD is the use of a functional polymer brush layer for the in situ deposition of metal thin films onto substrate materials with different structures. PAMD always includes three key steps: (1) surface grafting of a functional polymer brush layer onto the surface of the material, with the most-used polymer brushes being poly[2-(methacryloyloxy)ethyl] trimethylammonium chloride (PMETAC) and poly(acrylic acid) (PAA); (2) immobilization of metal catalytic moieties into the polymer brushes layer by electrostatic interactions; and (3) in situ generation of a metal film by sodium borohydride reduction.
In a typical case, PMETAC consists of Cl- surrounding a positively charged polymer with quaternary ammonium groups, which show strong affinity to metal anions such as [PdCl4]2- and [AuCl4]−. Huck and colleagues first reported the electroless deposition (ELD) of Cu and Au films on a Si substrate using the PAMD technique based on positively charged PMETAC brushes208,209. PAA-assisted ELD was first reported by Kobersterin and coworkers210 and further developed by Berthelot and coworkers211. Meanwhile, the use of low-cost metal cations ([Pd(NH3)4]2+, Cu2+, and Ni2+) instead of metal anions ([PdCl4]2−and [AuCl4]−) is considered as one significant advantage of using PAA polymer brushes in PAMD.
PAMD technology can be used to fabricate flexible and stretchable metal thin-film materials (Fig. 20a)212,213. Meanwhile, the simple ELD of metal films on elastic polymer substrates (PDMS) by PAMD technology always demonstrates a weak interfacial combination force208. Metal layer cracks appear rapidly upon substrate stretching because of the low stretchability of metal itself. To solve this problem, Wang et al.214 deposited a metal Cu layer onto a buckled PDMS film instead of a flat film, resulting in a high-performance stretchable conductor with stable metallic conductivity. This novel stretchable conductor provides a design idea for developing the next generation of wearable and intelligent electronics. Furthermore, PAMD technology can be used to construct electronic devices with patterned interconnections (Fig. 20b). For example, Guo et al.212 reported a new strategy, named matrix-assisted catalytic printing (MACP) technology, for the fabrication of patterned, flexible and stretchable metal interconnections (Cu, Ag, Au, and Ni) at variable scales from micrometers to namometers. In a typical case, MACP delivered the [PdCl4]2− catalytic moieties site-selectively to the PMETAC-modified substrate through various low-cost printing methods. The advantage of MACP is that the fabrication process does not need a prestretch step, while its disadvantage is that the resulting conductor can only be stretched up to a few percent values of its original size. Metalization by PAMD technology is not limited to only 2D thin-film substrates but is also suitable for preparing 3D complex conductive composites (Fig. 20c). For example, Yu et al.215 reported the fabrication of 3D stretchable interconnections by using PAMD on porous polyurethane (PU) sponges. Subsequently, the prepared metal sponges were infiltrated with PDMS to form an interpenetrated 3D composite conductor, which could be readily twisted, rolled, bent, stretched, and compressed in different directions. PDMS was responsible for most of the deformation, while the metal layer was relieved from high strain.

a Construction of flexible polymer/metal composite electrodes materials by PAMD. b Patterning of metal interconnections by employing the matrix-assisted catalytic printing (MACP) technique. c Fabrication of 3D metal sponges by PAMD. Reprinted with permission from Zheng and colleagues207. Copyright 2014, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
In summary, PAMD is a full-solution strategy for fabricating flexible, stretchable, compressible, and wearable metal conductors from 2D to 3D complex structures. Upon applying this technology, one can readily fabricate multiscale, patterned metal interconnections for different applications, such as robotic skins, sensors and actuators, medical implants, energy storage, and wearable electronics. However, PAMD may also have limitations, such as the difficulty in preparing Al devices, the lateral diffusion of the catalyst during the ELD process, and the impossibility of preparing multilayer devices. As Zheng et al. stated in their review article, “PAMD is still at an early stage of development”.
Conclusions, challenges, and outlook
Over the past few decades, the surface grafting of polymer brushes (SPB), as one kind of classical modification technique, has provided huge possibilities for the design of advanced functional materials with controlled interfacial properties. SPB allows the formation of functional polymer films on 2D, planar, rough substrates and even on 3D complex structures, which results in impressive potential for a wide range of applications.
Meanwhile, the responsive characteristics of polymer brushes offer the possibility of the fabrication of stimuli-responsive functional materials. For example, the surface grafting of responsive polymer brushes onto micron/nanostructures has been successfully used to control the wettability of materials. The wettability change is always accompanied by the evolution of a solid–liquid interface boundary slippage feature. For example, after grafting hydrophobic polymer brushes onto micro or nanostructural surfaces, the as-prepared functional materials can be used to reduce the flow resistance of liquids. Especially, SPB on 3D-printed complex structures based on the i3DP technique can be applied to develop functional wettability devices. During the past decades, the surface-grafting polymer brush technique has also received much attention for the engineering of functional materials to improve interface lubrication properties in both water and oil systems. Moreover, the combination of nanoparticles and polymer brushes offers an effective route by which to construct functionally composite materials, which can be used in catalysis. Meanwhile, the catalytic activity of the composite materials can be well controlled by using responsive polymer brushes as nanoparticle carriers. Furthermore, by grafting polymer brushes onto the inner surface of membrane channels, it is possible to prepare functional film materials for realizing controllable transportation and the effective separation of ions, molecules and even gases. Importantly, surface the grafting of hydrophilic polymer brushes can effectively improve the anti-fouling properties of substrate materials. Meanwhile, the grafting of zwitterionic polymer brushes onto substrate materials has been widely used to resist nonspecific protein adsorption, bacterial adhesion and marine anti-fouling. Noteworthily, SPB has also been used to improve the biological activity of material surfaces. For example, the surface grafting of responsive polymer brushes (SRPB) onto structured material surfaces can be used to effectively control the cell adhesion behavior. In addition, SPB is a very useful tool for constructing functional materials, which demonstrate promising applications in mechanical actuation. Finally, SPB can also be used as a key auxiliary means by which to develop flexible, stretchable, compressible, and wearable metal conductors, named the polymer-assisted metal deposition (PAMD) technique.
The above introduction of surface-grafting polymer brush techniques to engineer functional materials focuses only on some key applications. The techniques still have possibilities for further development. In the future, it is clear that polymer brushes will provide more fantastic application potential as a new way to decorate materials for performing chemistry, physics, and even biology on surfaces.
Even though SPB demonstrates great advantages for brushing up functional materials, some existing problems and necessary challenges must be face with consideration of its real applications in the future. First, because polymer brushes prepared via SI-ATRP always contain residual amounts of the metal catalyst, this would largely limit their practical applications in the biomedical field. Meanwhile, the photoinitiated radical grafting polymerization technique (commonly based on an initiator of diphenyl ketone or polydopamine) may be a good strategy to solve this problem, which has been successfully promoted in clinical applications. Second, the traditional SI-ATRP method always needs inert atmosphere protection to prevent the catalyst from being oxidized, which complicates the preparation process and causes a high preparation cost. Some new approaches, such as eSI-ATRP, Sar-ATRP, and UV-ATRP, seem to be used well to address this problem. However, the practical problem is that these approaches are only in the laboratory research stage and are still difficult to employ for large-scale engineering preparations. Third, the thickness of the grafted polymer brush layer on the material surface is commonly thin (from tens of nanometers to hundreds of nanometers). Especially on rough material surfaces, the thin brush layer tends to be wiped away under high interface contact pressure. This problem also highly limits the real application of polymer brush-based functional materials in the engineering field. Finally, one urgent challenge is in how to develop one general/universal method by which to easily graft polymer brushes onto material surfaces and reduce the waste of unpolymerized monomers. Therefore, it should be noted that SPB is still in an early stage of development considering its real engineering applications. Certainly, these problems and challenges may be well addressed by further development of the interfacial organic chemistry.
In summary, this review gives a broad introduction to the use of polymer brushes to prepare functional materials in multiple research fields. Correspondingly, we provide a brief summary at the end of each section, including the obtained achievements and challenges necessary to face. We believe that this review will provide basic guidance as a skeleton manual to show the significant advantages of surface-grafting polymer brush techniques for developing functional materials. This review will also provide refreshing ideas for scientists in the fields of chemistry and materials science for interdisciplinary research.
References
Barbey, R. et al. Polymer brushes via surface-initiated controlled radical polymerization: Synthesis, characterization, properties, and applications. Chem. Rev. 109, 5437–5527 (2009).
Omar, A. Polymer brushes here, there, and everywhere: Recent advances in their practical applications and emerging opportunities in multiple research fields. J. Polym. Sci., Part A: Polym. Chem. 50, 3225–3258 (2012).
Edmondson, S., Osborne, V. L. & Huck, W. T. Polymer brushes via surface-initiated polymerizations. Chem. Soc. Rev. 33, 14–22 (2004).
Zhao, B. & Brittain, W. J. Polymer brushes: Surface-immobilized macromolecules. Prog. Polym. Sci. 25, 677–710 (2000).
Li, B., Yu, B., Ye, Q. & Zhou, F. Tapping the potential of polymer brushes through synthesis. Acc. Chem. Res. 48, 229–237 (2015).
Minko, S. Responsive polymer brushes. J. Macromol. Sci., Part C 46, 397–420 (2006).
Chen, T., Ferris, R., Zhang, J., Ducker, R. & Zauscher, S. Stimulus-responsive polymer brushes on surfaces: Transduction mechanisms and applications. Prog. Polym. Sci. 35, 94–112 (2010).
Stuart, M. A. C. et al. Emerging applications of stimuli-responsive polymer materials. Nat. Mater. 9, 101–113 (2010).
Azzaroni, O., Brown, A. A., & Huck, W.T.S. Tunable wettability by clicking counterions into polyelectrolyte brushes. Adv. Mater. 19, 151–154 (2007).
Howarter, J. A. & Youngblood, J. P. Self‐cleaning and anti‐fog surfaces via stimuli‐responsive polymer brushes. Adv. Mater. 19, 3838–3843 (2007).
Mei, Y., Lu, Y., Polzer, F., Ballauff, M. & Drechsler, M. Catalytic activity of palladium nanoparticles encapsulated in spherical polyelectrolyte brushes and core−shell microgels. Chem. Mater. 19, 1062–1069 (2007).
Zhang, H. & Ito, Y. Ph control of transport through a porous membrane self-assembled with a poly(acrylic acid) loop brush. Langmuir 17, 8336–8340 (2001).
Lokuge, I., Wang, X. & Bohn, P. W. Temperature-controlled flow switching in nanocapillary array membranes mediated by poly(n-isopropylacrylamide) polymer brushes grafted by atom transfer radical polymerization. Langmuir 23, 305–311 (2007).
Mizutani, A., Kikuchi, A., Yamato, M., Kanazawa, H. & Okano, T. Preparation of thermoresponsive polymer brush surfaces and their interaction with cells. Biomaterials. 29, 2073–2081 (2008).
Erik, W. et al. Controlled cell adhesion on peg‐based switchable surfaces. Angew. Chem., Int. Ed. 47, 5666–5668 (2008).
Huck, W. T. S. Responsive polymers for nanoscale actuation. Mater. Today 11, 24–32 (2008).
Bajpai, A. K., Shukla, S. K., Bhanu, S. & Kankane, S. Responsive polymers in controlled drug delivery. Prog. Polym. Sci. 33, 1088–1118 (2008).
Wei, Q., Cai, M., Zhou, F. & Liu, W. Dramatically tuning friction using responsive polyelectrolyte brushes. Macromolecules 46, 9368–9379 (2013).
Raviv, U. et al. Lubrication by charged polymers. Nature 425, 163–165 (2003).
Tadmor, R., Janik, J., Klein, J. & Fetters, L. J. Sliding friction with polymer brushes. Phys. Rev. Lett. 91, 115503 (2003).
Kobayashi, M. & Takahara, A. Tribological properties of hydrophilic polymer brushes under wet conditions. Chem. Rec. 10, 208–216 (2010).
Moro, T. et al. Surface grafting of artificial joints with a biocompatible polymer for preventing periprosthetic osteolysis. Nat. Mater. 3, 829–836 (2004).
Kyomoto, M., Moro, T., Takatori, Y., Kawaguchi, H. & Ishihara, K. Cartilage-mimicking, high-density brush structure improves wear resistance of crosslinked polyethylene: A pilot study. Clin. Orthop. Relat. Res. 469, 2327–2336 (2011).
Higaki, Y., Kobayashi, M., Murakami, D. & Takahara, A. Anti-fouling behavior of polymer brush immobilized surfaces. Polym. J. 48, 325 (2016).
Ladd, J., Zhang, Z., Chen, S., Hower, J. C. & Jiang, S. Zwitterionic polymers exhibiting high resistance to nonspecific protein adsorption from human serum and plasma. Biomacromolecules 9, 1357–1361 (2008).
Zdyrko, B. et al. Polymer brushes as active nanolayers for tunable bacteria adhesion. Mater. Sci. Eng., C 29, 680–684 (2009).
Yang, W. J., Neoh, K.-G., Kang, E.-T., Teo, S. L.-M. & Rittschof, D. Polymer brush coatings for combating marine biofouling. Prog. Polym. Sci. 39, 1017–1042 (2014).
Callow, J. A. & Callow, M. E. Trends in the development of environmentally friendly fouling-resistant marine coatings. Nat. Commun. 2, 244 (2011).
Tugulu, S., Silacci, P., Stergiopulos, N. & Klok, H. -A. Rgd—functionalized polymer brushes as substrates for the integrin specific adhesion of human umbilical vein endothelial cells. Biomaterials. 28, 2536–2546 (2007).
Gao, G. et al. The biocompatibility and biofilm resistance of implant coatings based on hydrophilic polymer brushes conjugated with antimicrobial peptides. Biomaterials. 32, 3899–3909 (2011).
Glinel, K. et al. Antibacterial and antifouling polymer brushes incorporating antimicrobial peptide. Bioconjugate Chem. 20, 71–77 (2009).
Hou, S. et al. Capture and stimulated release of circulating tumor cells on polymer‐grafted silicon nanostructures. Adv. Mater. 25, 1547–1551 (2013).
Bruening, M. L., Dotzauer, D. M., Jain, P., Ouyang, L. & Baker, G. L. Creation of functional membranes using polyelectrolyte multilayers and polymer brushes. Langmuir 24, 7663–7673 (2008).
Zhao, B., Brittain, W. J., Zhou, W. & Cheng, S. Z. D. Nanopattern formation from tethered ps-b-pmma brushes upon treatment with selective solvents. J. Am. Chem. Soc. 122, 2407–2408 (2000).
Li, D., Sheng, X. & Zhao, B. Environmentally responsive “hairy” nanoparticles: Mixed homopolymer brushes on silica nanoparticles synthesized by living radical polymerization techniques. J. Am. Chem. Soc. 127, 6248–6256 (2005).
Brittain, W. J. & Minko, S. A structural definition of polymer brushes. J. Polym. Sci., Part A: Polym. Chem. 45, 3505–3512 (2007).
Wu, T., Efimenko, K. & Genzer, J. Combinatorial study of the mushroom-to-brush crossover in surface anchored polyacrylamide. J. Am. Chem. Soc. 124, 9394–9395 (2002).
Kent, M. S. A quantitative study of tethered chains in various solution conditions using langmuir diblock copolymer monolayers. Macromol. Rapid Commun. 21, 243–270 (2000).
Bogdan, Z. & Igor, L. Polymer brushes by the “grafting to” method. Macromol. Rapid Commun. 32, 859–869 (2011).
Jeffrey, P., Tomasz, K. & Krzysztof, M. Synthesis of polymer brushes using atom transfer radical polymerization. Macromol. Rapid Commun. 24, 1043–1059 (2003).
Baum, M. & Brittain, W. J. Synthesis of polymer brushes on silicate substrates via reversible addition fragmentation chain transfer technique. Macromolecules 35, 610–615 (2002).
Li, C. & Benicewicz, B. C. Synthesis of well-defined polymer brushes grafted onto silica nanoparticles via surface reversible addition−fragmentation chain transfer polymerization. Macromolecules 38, 5929–5936 (2005).
Johnson, J. A. et al. Drug-loaded, bivalent-bottle-brush polymers by graft-through romp. Macromolecules 43, 10326–10335 (2010).
Brinks Marion, K. & Studer, A. Polymer brushes by nitroxide‐mediated polymerization. Macromol. Rapid Commun. 30, 1043–1057 (2009).
Tang, W. et al. Understanding atom transfer radical polymerization: Effect of ligand and initiator structures on the equilibrium constants. J. Am. Chem. Soc. 130, 10702–10713 (2008).
Zhu, B. & Edmondson, S. Polydopamine-melanin initiators for surface-initiated atrp. Polymer. (Guildf). 52, 2141–2149 (2011).
Chmielarz, P. et al. Electrochemically mediated atom transfer radical polymerization (eatrp). Prog. Polym. Sci. 69, 47–78 (2017).
Li, B., Yu, B., Huck, W. T. S., Zhou, F. & Liu, W. Electrochemically induced surface‐initiated atom‐transfer radical polymerization. Angew. Chem., Int. Ed. 124, 5182–5185 (2012).
Strover, L. T., Malmström, J., Stubbing, L. A., Brimble, M. A. & Travas-Sejdic, J. Electrochemically-controlled grafting of hydrophilic brushes from conducting polymer substrates. Electrochim. Acta 188, 57–70 (2016).
Han, J. et al. Porous nitrogen-doped hollow carbon spheres derived from polyaniline for high performance supercapacitors. J. Mater. Chem. A 2, 5352–5357 (2014).
Yan, J. et al. Controlled polymer‐brush growth from microliter volumes using sacrificial‐anode atom‐transfer radical polymerization. Angew. Chem., Int. Ed. 52, 9125–9129 (2013).
Masuda, T., Akimoto, A. M., Nagase, K., Okano, T. & Yoshida, R. Artificial cilia as autonomous nanoactuators: Design of a gradient self-oscillating polymer brush with controlled unidirectional motion. Sci. Adv. 2, e1600902 (2016).
Yan, J., Li, B., Zhou, F. & Liu, W. Ultraviolet light-induced surface-initiated atom-transfer radical polymerization. ACS Macro Lett. 2, 592–596 (2013).
Sheng, W. et al. Brushing up from “anywhere” under sunlight: A universal surface-initiated polymerization from polydopamine-coated surfaces. Chem. Sci. 6, 2068–2073 (2015).
Dyer, D. J. In Surface-Initiated Polymerization I (ed. Jordan, R.) Vol. 197, 47–65 (Springer Berlin Heidelberg, Berlin, Heidelberg, 2006).
Feng, J., Haasch, R. T. & Dyer, D. J. Photoinitiated synthesis of mixed polymer brushes of polystyrene and poly(methyl methacrylate). Macromolecules 37, 9525–9537 (2004).
Chang, Y. et al. Development of biocompatible interpenetrating polymer networks containing a sulfobetaine-based polymer and a segmented polyurethane for protein resistance. Biomacromolecules 8, 122–127 (2007).
Tao, D. et al. Bio‐inspired renewable surface‐initiated polymerization from permanently embedded initiators. Angew. Chem., Int. Ed. 55, 4260–4264 (2016).
Zhou, X., Liu, X., Xie, Z. & Zheng, Z. 3d-patterned polymer brush surfaces. Nanoscale 3, 4929–4939 (2011).
Liu, X., Li, Y. & Zheng, Z. Programming nanostructures of polymer brushes by dip-pen nanodisplacement lithography (dnl). Nanoscale 2, 2614–2618 (2010).
Gan, T. et al. Liquid-mediated three-dimensional scanning probe nanosculpting. Small 9, 2851–2856 (2013).
Sun, T. et al. Reversible switching between superhydrophilicity and superhydrophobicity. Angew. Chem. 116, 361–364 (2004).
Sun, T., Feng, L., Gao, X. & Jiang, L. Bioinspired surfaces with special wettability. ACC Chem. Res. 38, 644–652 (2005).
Fu, Q. et al. Reversible control of free energy and topography of nanostructured surfaces. J. Am. Chem. Soc. 126, 8904–8905 (2004).
Hongliang, L., Xiqi, Z., Shutao, W. & Lei, J. Underwater thermoresponsive surface with switchable oil‐wettability between superoleophobicity and superoleophilicity. Small 11, 3338–3342 (2015).
Du, T., Ma, S., Pei, X., Wang, S. & Zhou, F. Bio‐inspired design and fabrication of micro/nano‐brush dual structural surfaces for switchable oil adhesion and antifouling. Small 13, 1602020 (2017).
Samanta, S. & Locklin, J. Formation of photochromic spiropyran polymer brushes via surface-initiated, ring-opening metathesis polymerization: Reversible photocontrol of wetting behavior and solvent dependent morphology changes. Langmuir 24, 9558–9565 (2008).
Fries, K., Samanta, S., Orski, S. & Locklin, J. Reversible colorimetric ion sensors based on surface initiated polymerization of photochromic polymers. Chem. Commun. 21, 6288–6290 (2008).
Zhao, B., Haasch, R. T. & MacLaren, S. Solvent-induced self-assembly of mixed poly (methyl methacrylate)/polystyrene brushes on planar silica substrates: Molecular weight effect. J. Am. Chem. Soc. 126, 6124–6134 (2004).
Guo, Y. & Moffitt, M. G. Semiconductor quantum dots with environmentally responsive mixed polystyrene/poly (methyl methacrylate) brush layers. Macromolecules 40, 5868–5878 (2007).
Vyas, M. K., Schneider, K., Nandan, B. & Stamm, M. Switching of friction by binary polymer brushes. Soft Matter 4, 1024–1032 (2008).
Yu, K., Wang, H. & Han, Y. Motion of integrated cds nanoparticles by phase separation of block copolymer brushes. Langmuir 23, 8957–8964 (2007).
Ionov, L., Houbenov, N., Sidorenko, A., Stamm, M. & Minko, S. Smart microfluidic channels. Adv. Funct. Mater. 16, 1153–1160 (2006).
Sanjuan, S., Perrin, P., Pantoustier, N. & Tran, Y. Synthesis and swelling behavior of ph-responsive polybase brushes. Langmuir 23, 5769–5778 (2007).
Treat, N. D., Ayres, N., Boyes, S. G. & Brittain, W. J. A facile route to poly (acrylic acid) brushes using atom transfer radical polymerization. Macromolecules 39, 26–29 (2006).
Zhou, F. & Huck, W. T. Three-stage switching of surface wetting using phosphate-bearing polymer brushes. Chem. Commun. 28, 5999–6001 (2005).
Dunderdale, G. J., Urata, C., Miranda, D. F. & Hozumi, A. Large-scale and environmentally friendly synthesis of ph-responsive oil-repellent polymer brush surfaces under ambient conditions. ACS Appl. Mater. Interfaces 6, 11864–11868 (2014).
Zhang, L., Zhang, Z. & Wang, P. Smart surfaces with switchable superoleophilicity and superoleophobicity in aqueous media: Toward controllable oil/water separation. NPG Asia Mater. 4, e8 (2012).
Xia, F. et al. Dual‐responsive surfaces that switch between superhydrophilicity and superhydrophobicity. Adv. Mater. 18, 432–436 (2006).
Xia, F. et al. Multiresponsive surfaces change between superhydrophilicity and superhydrophobicity. Adv. Mater. 19, 2520–2524 (2007).
Ng, S. W., Noor, N. & Zheng, Z. Graphene-based two-dimensional janus materials. NPG Asia Mater. 10, 217–237 (2018).
Gao, T. et al. Transferable, transparent and functional polymer@graphene 2d objects. NPG Asia Mater. 6, e130 (2014).
Yao, X. et al. Superhydrophobic diffusion barriers for hydrogels via confined interfacial modification. Adv. Mater. 28, 7383–7389 (2016).
Chen, L. et al. Integration of hydrogels with functional nanoparticles using hydrophobic comb-like polymers as an adhesive layer. J. Mater. Chem. A 6, 15147–15153 (2018).
Chen, L., Yin, Y. A., Liu, Y. X., Lin, L. & Liu, M. J. Design and fabrication of functional hydrogels through interfacial engineering. Chinese J. Polym. Sci. 35, 1181–1193 (2017).
Zhu, Y. & Granick, S. Apparent slip of newtonian fluids past adsorbed polymer layers. Macromolecules 35, 4658–4663 (2002).
Bhushan, B. & Jung, Y. C. Natural and biomimetic artificial surfaces for superhydrophobicity, self-cleaning, low adhesion, and drag reduction. Prog. Mater. Sci. 56, 1–108 (2011).
Daniello, R. J., Waterhouse, N. E. & Rothstein, J. P. Drag reduction in turbulent flows over superhydrophobic surfaces. Phys. Fluids 21, 085103 (2009).
Lee, C. & Kim, C. -J. Underwater restoration and retention of gases on superhydrophobic surfaces for drag reduction. Phys. Rev. Lett. 106, 014502 (2011).
Wu, Y. et al. Slip flow of diverse liquids on robust superomniphobic surfaces. J. Colloid Interf. Sci. 414, 9–13 (2014).
Wu, Y. et al. Adhesion-regulated switchable fluid slippage on superhydrophobic surfaces. J. Phys. Chem. C 118, 2564–2569 (2014).
Wu, Y. et al. Photoresponsive superhydrophobic coating for regulating boundary slippage. Soft Matter 10, 5318–5324 (2014).
Wu, Y. et al. Switching fluid slippage on ph-responsive superhydrophobic surfaces. Langmuir 30, 6463–6468 (2014).
Wang, X. et al. I3dp, a robust 3d printing approach enabling genetic post-printing surface modification. Chem. Commun. 49, 10064–10066 (2013).
Xiao, D., Zhang, H. & Wirth, M. Chemical modification of the surface of poly (dimethylsiloxane) by atom-transfer radical polymerization of acrylamide. Langmuir 18, 9971–9976 (2002).
Huber, D. L., Manginell, R. P., Samara, M. A., Kim, B.-I. & Bunker, B. C. Programmed adsorption and release of proteins in a microfluidic device. Science 301, 352–354 (2003).
Hou, X., Zhang, H. & Jiang, L. Building bio‐inspired artificial functional nanochannels: From symmetric to asymmetric modification. Angew. Chem., Int. Ed. 51, 5296–5307 (2012).
Myshkin, N. K., Petrokovets, M. I. & Kovalev, A. V. Tribology of polymers: Adhesion, friction, wear, and mass-transfer. Tribol. Int. 38, 910–921 (2005).
Myshkin, N. K. & Kovalev, A. V. In Polymer Tribology, 3–37 (Imperial College Press, London 2009).
Schmidt, T. A., Gastelum, N. S., Nguyen, Q. T., Schumacher, B. L. & SahA, R. L. Boundary lubrication of articular cartilage: Role of synovial fluid constituents. Arthritis Rheum. 56, 882–891 (2007).
Klein, J. Repair or replacement--a joint perspective. Science 323, 47–48 (2009).
Müller, M. T., Yan, X., Lee, S., Perry, S. S. & Spencer, N. D. Lubrication properties of a brushlike copolymer as a function of the amount of solvent absorbed within the brush. Macromolecules 38, 5706–5713 (2005).
Banquy, X., Burdyńska, J., Lee, D. W., Matyjaszewski, K. & Israelachvili, J. Bioinspired bottle-brush polymer exhibits low friction and amontons-like behavior. J. Am. Chem. Soc. 136, 6199–6202 (2014).
Chen, M., Briscoe, W. H., Armes, S. P. & Klein, J. Lubrication at physiological pressures by polyzwitterionic brushes. Science 323, 1698 (2009).
Wei, Q., et al. Surface modification of diamond‐like carbon film with polymer brushes using a bio‐inspired catechol anchor for excellent biological lubrication. Adv. Mater. Interfaces 1, 1400035 (2014).
Liu, G., Cai, M., Zhou, F. & Liu, W. Charged polymer brushes-grafted hollow silica nanoparticles as a novel promising material for simultaneous joint lubrication and treatment. J. Phys. Chem. B 118, 4920–4931 (2014).
Liu, G. et al. Hairy polyelectrolyte brushes-grafted thermosensitive microgels as artificial synovial fluid for simultaneous biomimetic lubrication and arthritis treatment. ACS Appl. Mater. Interfaces 6, 20452–20463 (2014).
Dedinaite, A. Biomimetic lubrication. Soft Matter 8, 273–284 (2012).
Li, Z., Ma, S., Zhang, G., Wang, D. & Zhou, F. Soft/hard-coupled amphiphilic polymer nanospheres for water lubrication. ACS Appl. Mater. Interfaces 10, 9178–9187 (2018).
Fan, J., Müller, M., Stöhr, T. & Spikes, H. A. Reduction of friction by functionalised viscosity index improvers. Tribol. Lett. 28, 287–298 (2007).
Bielecki, R. M., Benetti, E. M., Kumar, D. & Spencer, N. D. Lubrication with oil-compatible polymer brushes. Tribol. Lett. 45, 477–487 (2012).
Wright, R. A., Wang, K., Qu, J. & Zhao, B. Oil‐soluble polymer brush grafted nanoparticles as effective lubricant additives for friction and wear reduction. Angew. Chem., Int. Ed. 55, 8656–8660 (2016).
Yu, M., Lu, Y., Schrinner, M., Polzer, F. & Ballauff, M. Spherical polyelectrolyte brushes as carriers for catalytically active metal nanoparticles. Macromol. Symp. 254, 42–45 (2007).
Schrinner, M. et al. Stable bimetallic gold–platinum nanoparticles immobilized on spherical polyelectrolyte brushes: Synthesis, characterization, and application for the oxidation of alcohols. Adv. Mater. 20, 1928–1933 (2008).
Sharma, G. et al. Spherical polyelectrolyte brushes as carriers for platinum nanoparticles in heterogeneous hydrogenation reactions. J. Catal. 246, 10–14 (2007).
Dotzauer, D. M., Dai, J., Sun, L. & Bruening, M. L. Catalytic membranes prepared using layer-by-layer adsorption of polyelectrolyte/metal nanoparticle films in porous supports. Nano Lett. 6, 2268–2272 (2006).
Liu, J. et al. Parallel array of nanochannels grafted with polymer-brushes-stabilized au nanoparticles for flow-through catalysis. Nanoscale 5, 11894–11901 (2013).
Ma, S. et al. A general approach for construction of asymmetric modification membranes for gated flow nanochannels. J. Mater. Chem. A 2, 8804–8814 (2014).
Lu, Y., Mei, Y., Drechsler, M. & Ballauff, M. Thermosensitive core–shell particles as carriers for ag nanoparticles: Modulating the catalytic activity by a phase transition in networks. Angew. Chem., Int. Ed. 45, 813–816 (2006).
Lupitskyy, R., Motornov, M. & Minko, S. Single nanoparticle plasmonic devices by the “grafting to” method. Langmuir 24, 8976–8980 (2008).
Liu, G., Wang, D., Zhou, F. & Liu, W. Electrostatic self‐assembly of au nanoparticles onto thermosensitive magnetic core‐shell microgels for thermally tunable and magnetically recyclable catalysis. Small. 11, 2807–2816 (2015).
Hollman, A. M. & Bhattacharyya, D. Pore assembled multilayers of charged polypeptides in microporous membranes for ion separation. Langmuir 20, 5418–5424 (2004).
Calvo, A., Yameen, B., Williams, F. J., Soler-Illia, G. J. & Azzaroni, O. Mesoporous films and polymer brushes helping each other to modulate ionic transport in nanoconfined environments. An interesting example of synergism in functional hybrid assemblies. J. Am. Chem. Soc. 131, 10866–10868 (2009).
Liu, X. & Bruening, M. L. Size-selective transport of uncharged solutes through multilayer polyelectrolyte membranes. Chem. Mater. 16, 351–357 (2004).
Yang, H., Viera, C., Fischer, J. & Etzel, M. R. Purification of a large protein using ion-exchange membranes. Ind. Eng. Chem. Res. 41, 1597–1602 (2002).
Sun, L., Baker, G. L. & Bruening, M. L. Polymer brush membranes for pervaporation of organic solvents from water. Macromolecules 38, 2307–2314 (2005).
Miller, M. D. & Bruening, M. L. Correlation of the swelling and permeability of polyelectrolyte multilayer films. Chem. Mater. 17, 5375–5381 (2005).
Brunsen, A. et al. Proton and calcium-gated ionic mesochannels: Phosphate-bearing polymer brushes hosted in mesoporous thin films as biomimetic interfacial architectures. Langmuir 28, 3583–3592 (2012).
Balachandra, A. M., Baker, G. L. & Bruening, M. L. Preparation of composite membranes by atom transfer radical polymerization initiated from a porous support. J. Membr. Sci. 227, 1–14 (2003).
Dai, J., Baker, G. L. & Bruening, M. L. Use of porous membranes modified with polyelectrolyte multilayers as substrates for protein arrays with low nonspecific adsorption. Anal. Chem. 78, 135–140 (2006).
Yameen, B. et al. Synthetic proton-gated ion channels via single solid-state nanochannels modified with responsive polymer brushes. Nano Lett. 9, 2788–2793 (2009).
Yameen, B. et al. Proton-regulated rectified ionic transport through solid-state conical nanopores modified with phosphate-bearing polymer brushes. Chem. Commun. 46, 1908–1910 (2010).
Guo, W. et al. Integrating ionic gate and rectifier within one solid‐state nanopore via modification with dual‐responsive copolymer brushes. Adv. Funct. Mater. 20, 3561–3567 (2010).
Hou, X. et al. A biomimetic asymmetric responsive single nanochannel. J. Am. Chem. Soc. 132, 11736–11742 (2010).
Ma, H., Hyun, J., Stiller, P. & Chilkoti, A. “Non‐fouling” oligo(ethylene glycol)‐ functionalized polymer brushes synthesized by surface‐initiated atom transfer radical polymerization. Adv. Mater. 16, 338–341 (2004).
Jeon, S., Lee, J., Andrade, J. & De Gennes, P. Protein—surface interactions in the presence of polyethylene oxide: I. Simplified theory. J. Colloid. Interface. Sci. 142, 149–158 (1991).
Ostuni, E., Chapman, R. G., Holmlin, R. E., Takayama, S. & Whitesides, G. M. A survey of structure−property relationships of surfaces that resist the adsorption of protein. Langmuir 17, 5605–5620 (2001).
Shen, M. et al. Peo-like plasma polymerized tetraglyme surface interactions with leukocytes and proteins: In vitro and in vivo studies. J. Biomater. Sci. Polym. Ed. 13, 367–390 (2002).
Luk, Y.-Y., Kato, M. & Mrksich, M. Self-assembled monolayers of alkanethiolates presenting mannitol groups are inert to protein adsorption and cell attachment. Langmuir 16, 9604–9608 (2000).
Zhao, C., Li, L. & Zheng, J. Achieving highly effective nonfouling performance for surface-grafted poly (hpma) via atom-transfer radical polymerization. Langmuir 26, 17375–17382 (2010).
Lewis, A. L. Phosphorylcholine-based polymers and their use in the prevention of biofouling. Colloids Surf., B 18, 261–275 (2000).
Ishihara, K. & Iwasaki, Y. Reduced protein adsorption on novel phospholipid polymers. J. Biomater. Appl. 13, 111–127 (1998).
Ishihara, K. et al. Why do phospholipid polymers reduce protein adsorption? J. Biomed. Mater. Res. 39, 323–330 (1998).
Murphy, E., Lu, J., Brewer, J., Russell, J. & Penfold, J. The reduced adsorption of proteins at the phosphoryl choline incorporated polymer−water interface. Langmuir 15, 1313–1322 (1999).
Murphy, E. F., Keddie, J. L., Lu, J. R., Brewer, J. & Russell, J. The reduced adsorption of lysozyme at the phosphorylcholine incorporated polymer/aqueous solution interface studied by spectroscopic ellipsometry. Biomaterials. 20, 1501–1511 (1999).
Ishihara, K., Ishikawa, E., Iwasaki, Y. & Nakabayashi, N. Inhibition of fibroblast cell adhesion on substrate by coating with 2-methacryloyloxyethyl phosphorylcholine polymers. J. Biomater. Sci. Polym. Ed. 10, 1047–1061 (1999).
Hasegawa, T., Iwasaki, Y. & Ishihara, K. Preparation of blood‐compatible hollow fibers from a polymer alloy composed of polysulfone and 2‐methacryloyloxyethyl phosphorylcholine polymer. J. Biomed. Mater. Res. Part A 63, 333–341 (2002).
Feng, W., Zhu, S., Ishihara, K. & Brash, J. L. Adsorption of fibrinogen and lysozyme on silicon grafted with poly (2-methacryloyloxyethyl phosphorylcholine) via surface-initiated atom transfer radical polymerization. Langmuir 21, 5980–5987 (2005).
Yoshimoto, K., Hirase, T., Madsen, J., Armes, S. P. & Nagasaki, Y. Non‐fouling character of poly [2‐(methacryloyloxy) ethyl phosphorylcholine]‐modified gold surfaces fabricated by the ‘grafting to’method: Comparison of its protein resistance with poly (ethylene glycol)‐modified gold surfaces. Macromol. Rapid Commun. 30, 2136–2140 (2009).
Zhang, Z., Chen, S., Chang, Y. & Jiang, S. Surface grafted sulfobetaine polymers via atom transfer radical polymerization as superlow fouling coatings. J. Phys. Chem. B 110, 10799–10804 (2006).
Zhang, Z., Chen, S. & Jiang, S. Dual-functional biomimetic materials: Nonfouling poly (carboxybetaine) with active functional groups for protein immobilization. Biomacromolecules 7, 3311–3315 (2006).
Sundaram, H. S., Ella-Menye, J.-R., Brault, N. D., Shao, Q. & Jiang, S. Reversibly switchable polymer with cationic/zwitterionic/anionic behavior through synergistic protonation and deprotonation. Chem. Sci. 5, 200–205 (2014).
Nagase, K. et al. Thermo-responsive protein adsorbing materials for purifying pharmaceutical protein on exposed charging surface. J. Mater. Chem. 21, 2590–2593 (2011).
Murata, H., Koepsel, R. R., Matyjaszewski, K. & Russell, A. J. Permanent, non-leaching antibacterial surfaces—2: How high density cationic surfaces kill bacterial cells. Biomaterials 28, 4870–4879 (2007).
Cheng, G., Zhang, Z., Chen, S., Bryers, J. D. & Jiang, S. Inhibition of bacterial adhesion and biofilm formation on zwitterionic surfaces. Biomaterials 28, 4192–4199 (2007).
Cheng, G. et al. Zwitterionic carboxybetaine polymer surfaces and their resistance to long-term biofilm formation. Biomaterials 30, 5234–5240 (2009).
Costa, F., Carvalho, I. F., Montelaro, R. C., Gomes, P. & Martins, M. C. L. Covalent immobilization of antimicrobial peptides (amps) onto biomaterial surfaces. Acta Biomater. 7, 1431–1440 (2011).
Glinel, K., Thebault, P., Humblot, V., Pradier, C.-M. & Jouenne, T. Antibacterial surfaces developed from bio-inspired approaches. Acta Biomater. 8, 1670–1684 (2012).
Magin, C. M. et al. Antifouling performance of cross-linked hydrogels: Refinement of an attachment model. Biomacromolecules 12, 915–922 (2011).
Jiang, S. & Cao, Z. Ultralow‐fouling, functionalizable, and hydrolyzable zwitterionic materials and their derivatives for biological applications. Adv. Mater. 22, 920–932 (2010).
Zhang, Z., Chao, T., Chen, S. & Jiang, S. Superlow fouling sulfobetaine and carboxybetaine polymers on glass slides. Langmuir 22, 10072–10077 (2006).
Wan, F. et al. Grafting polymer brushes on biomimetic structural surfaces for anti-algae fouling and foul release. ACS Appl. Mater. Interfaces 4, 4557–4565 (2012).
Ma, S., Ye, Q., Pei, X., Wang, D. & Zhou, F. Antifouling on gecko’s feet inspired fibrillar surfaces: Evolving from land to marine and from liquid repellency to algae resistance. Adv. Mater. Interfaces 2, 1500257 (2015).
Wan, F., Ye, Q., Yu, B., Pei, X. & Zhou, F. Multiscale hairy surfaces for nearly perfect marine antibiofouling. J. Mat. Chem. B 1, 3599–3606 (2013).
Sharma, S. K., Chauhan, G. S., Gupta, R. & Ahn, J. -H. Tuning anti-microbial activity of poly (4-vinyl 2-hydroxyethyl pyridinium) chloride by anion exchange reactions. J. Mater. Sci.: Mater. Med. 21, 717–724 (2010).
Pernak, J., Sobaszkiewicz, K. & Mirska, I. Anti-microbial activities of ionic liquids. Green Chem. 5, 52–56 (2003).
Ye, Q. et al. Grafting poly(ionic liquid) brushes for anti-bacterial and anti-biofouling applications. J. Mater. Chem. 22, 13123–13131 (2012).
Zhao, W., Ye, Q., Hu, H., Wang, X. & Zhou, F. Grafting zwitterionic polymer brushes via electrochemical surface-initiated atomic-transfer radical polymerization for anti-fouling applications. J. Mat. Chem. B 2, 5352–5357 (2014).
Zhao, W., Ye, Q., Hu, H., Wang, X. & Zhou, F. Fabrication of binary components based on a poly (ionic liquid) through “grafting” and “clicking” and their synergistic antifouling activity. RSC Adv. 5, 100347–100353 (2015).
Liu, H., Ma, Z., Yang, W., Pei, X. & Zhou, F. Facile preparation of structured zwitterionic polymer substrate via sub-surface initiated atom transfer radical polymerization and its synergistic marine antifouling investigation. Eur. Polym. J. 146–152 (2018).
Raynor, J. E., Capadona, J. R., Collard, D. M., Petrie, T. A. & García, A. J. Polymer brushes and self-assembled monolayers: Versatile platforms to control cell adhesion to biomaterials. Biointerphases 4, FA3–FA16 (2009).
Moroni, L., Gunnewiek, M. K. & Benetti, E. M. Polymer brush coatings regulating cell behavior: Passive interfaces turn into active. Acta Biomater. 10, 2367–2378 (2014).
Nagase, K., Watanabe, M., Kikuchi, A., Yamato, M. & Okano, T. Thermo‐responsive polymer brushes as intelligent biointerfaces: Preparation via atrp and characterization. Macromol. Biosci. 11, 400–409 (2011).
Halperin, A. & Kröger, M. Theoretical considerations on mechanisms of harvesting cells cultured on thermoresponsive polymer brushes. Biomaterials. 33, 4975–4987 (2012).
Takahashi, H. et al. Terminally functionalized thermoresponsive polymer brushes for simultaneously promoting cell adhesion and cell sheet harvest. Biomacromolecules 13, 253–260 (2012).
Vihola, H., Laukkanen, A., Valtola, L., Tenhu, H. & Hirvonen, J. Cytotoxicity of thermosensitive polymers poly (n-isopropylacrylamide), poly (n-vinylcaprolactam) and amphiphilically modified poly (n-vinylcaprolactam). Biomaterials. 26, 3055–3064 (2005).
Raynor, J. E., Petrie, T. A., Garcia, A. J. & Collard, D. M. Controlling cell adhesion to titanium: Functionalization of poly [oligo (ethylene glycol) methacrylate] brushes with cell‐adhesive peptides. Adv. Mater. 19, 1724–1728 (2007).
Petrie, T. A. et al. The effect of integrin-specific bioactive coatings on tissue healing and implant osseointegration. Biomaterials. 29, 2849–2857 (2008).
Ren, X., Wu, Y., Cheng, Y., Ma, H. & Wei, S. Fibronectin and bone morphogenetic protein-2-decorated poly (oegma-r-hema) brushes promote osseointegration of titanium surfaces. Langmuir 27, 12069–12073 (2011).
Arisaka, Y., Kobayashi, J., Yamato, M., Akiyama, Y. & Okano, T. Switching of cell growth/detachment on heparin-functionalized thermoresponsive surface for rapid cell sheet fabrication and manipulation. Biomaterials 34, 4214–4222 (2013).
Paripovic, D., Hall-Bozic, H. & Klok, H. -A. Osteoconductive surfaces generated from peptide functionalized poly (2-hydroxyethyl methacrylate-co-2-(methacryloyloxy) ethyl phosphate) brushes. J. Mater. Chem. 22, 19570–19578 (2012).
Chen, L. et al. Antiplatelet and thermally responsive poly (n-isopropylacrylamide) surface with nanoscale topography. J. Am. Chem. Soc. 131, 10467–10472 (2009).
Liu, H. et al. Dual-responsive surfaces modified with phenylboronic acid-containing polymer brush to reversibly capture and release cancer cells. J. Am. Chem. Soc. 135, 7603–7609 (2013).
Anselme, K., Ploux, L. & Ponche, A. Cell/material interfaces: Influence of surface chemistry and surface topography on cell adhesion. J. Adhes. Sci. Technol. 24, 831–852 (2010).
Chen, L., Yan, C. & Zheng, Z. Functional polymer surfaces for controlling cell behaviors. Materials Today 21, 38–59 (2018).
Chen, L. et al. Biomimicking nano-micro binary polymer brushes for smart cell orientation and adhesion control. Small 12, 3400–3406 (2016).
Ionov, L. et al. Reversible chemical patterning on stimuli-responsive polymer film: Environment-responsive lithography. J. Am. Chem. Soc. 125, 8302–8306 (2003).
Zhao, B. & Brittain, W. J. Synthesis of tethered polystyrene-block-poly (methyl methacrylate) monolayer on a silicate substrate by sequential carbocationic polymerization and atom transfer radical polymerization. J. Am. Chem. Soc. 121, 3557–3558 (1999).
Mitsuishi, M. et al. Nanoscale actuation of thermoreversible polymer brushes coupled with localized surface plasmon resonance of gold nanoparticles. Langmuir 23, 7472–7474 (2007).
Comrie, J. E. & Huck, W. T. Exploring actuation and mechanotransduction properties of polymer brushes. Macromol. Rapid Commun. 29, 539–546 (2008).
Bhat, R. R., Genzer, J., Chaney, B. N., Sugg, H. W. & Liebmann-Vinson, A. Controlling the assembly of nanoparticles using surface grafted molecular and macromolecular gradients. Nanotechnology. 14, 1145 (2003).
Santer, S., Kopyshev, A., Donges, J., Yang, H. K. & Rühe, J. Dynamically reconfigurable polymer films: Impact on nanomotion. Adv. Mater. 18, 2359–2362 (2006).
Tokareva, I., Minko, S., Fendler, J. H. & Hutter, E. Nanosensors based on responsive polymer brushes and gold nanoparticle enhanced transmission surface plasmon resonance spectroscopy. J. Am. Chem. Soc. 126, 15950–15951 (2004).
Zhou, F., Shu, W., Welland, M. E. & Huck, W. T. Highly reversible and multi-stage cantilever actuation driven by polyelectrolyte brushes. J. Am. Chem. Soc. 128, 5326–5327 (2006).
Bumbu, G.-G., Wolkenhauer, M., Kircher, G., Gutmann, J. S. & Berger, R. Micromechanical cantilever technique: A tool for investigating the swelling of polymer brushes. Langmuir 23, 2203–2207 (2007).
Abu-Lail, N. I., Kaholek, M., LaMattina, B., Clark, R. L. & Zauscher, S. Micro-cantilevers with end-grafted stimulus-responsive polymer brushes for actuation and sensing. Sens. Actuators, B 114, 371–378 (2006).
Perkins, T. T., Smith, D. E. & Chu, S. Single polymer dynamics in an elongational flow. Science 276, 2016–2021 (1997).
Gfeller, K. Y., Nugaeva, N. & Hegner, M. Micromechanical oscillators as rapid biosensor for the detection of active growth of escherichia coli. Biosens. Bioelectron. 21, 528–533 (2005).
Prokhorova, S. A., Kopyshev, A., Ramakrishnan, A., Zhang, H. & Rühe, J. Can polymer brushes induce motion of nano-objects? Nanotechnology 14, 1098 (2003).
Prokhorova, S. A., Kopyshev, A., Ramakrishnan, A., Zhang, H. & Rühe, J. In Polymer Substrates as A Medium for Motion of Nano Objects, Microtechnologies for the New Millennium 2003. p. 11 (SPIE, Canary Islands, Spain 2003).
Santer, S. & Rühe, J. Motion of nano-objects on polymer brushes. Polymer. (Guildf). 45, 8279–8297 (2004).
Li, B., Du, T., Yu, B., van der Gucht, J. & Zhou, F. Caterpillar‐inspired design and fabrication of a self‐walking actuator with anisotropy, gradient, and instant response. Small 11, 3494–3501 (2015).
Zhou, F. et al. Polyelectrolyte brush amplified electroactuation of microcantilevers. Nano Lett. 8, 725–730 (2008).
Wang, D. et al. Chemical formation of soft metal electrodes for flexible and wearable electronics. Chem. Soc. Rev. 47, 4611–4641 (2018).
Zhao, Z. et al. Machine-washable textile triboelectric nanogenerators for effective human respiratory monitoring through loom weaving of metallic yarns. Adv. Mater. 28, 10267–10274 (2016).
Yang, Y. et al. Waterproof, ultrahigh areal-capacitance, wearable supercapacitor fabrics. Adv. Mater. 29, 1606679 (2017).
Yu, Y., Yan, C. & Zheng, Z. Polymer-assisted metal deposition (pamd): A full‐solution strategy for flexible, stretchable, compressible, and wearable metal conductors. Adv. Mater. 26, 5508–5516 (2014).
Azzaroni, O., Zheng, Z., Yang, Z. & Huck, W. T. Polyelectrolyte brushes as efficient ultrathin platforms for site-selective copper electroless deposition. Langmuir 22, 6730–6733 (2006).
Azzaroni, O. et al. Polyelectrolyte brushes as ink nanoreservoirs for microcontact printing of ionic species with poly (dimethyl siloxane) stamps. Adv. Funct. Mater. 16, 1037–1042 (2006).
Lancaster, J. R. et al. Toward a universal method to pattern metals on a polymer. Chem. Mater. 20, 6583–6585 (2008).
Garcia, A. et al. Polymer grafting by inkjet printing: A direct chemical writing toolset. Adv. Funct. Mater. 23, 3668–3674 (2013).
Guo, R. et al. Matrix‐assisted catalytic printing for the fabrication of multiscale, flexible, foldable, and stretchable metal conductors. Adv. Mater. 25, 3343–3350 (2013).
Liu, X., Chang, H., Li, Y., Huck, W. T. & Zheng, Z. Polyelectrolyte-bridged metal/cotton hierarchical structures for highly durable conductive yarns. ACS Appl. Mater. Interfaces 2, 529–535 (2010).
Wang, X., Hu, H., Shen, Y., Zhou, X. & Zheng, Z. Stretchable conductors with ultrahigh tensile strain and stable metallic conductance enabled by prestrained polyelectrolyte nanoplatforms. Adv. Mater. 23, 3090–3094 (2011).
Yu, Y. et al. Three‐dimensional compressible and stretchable conductive composites. Adv. Mater. 26, 810–815 (2014).
Acknowledgements
We gratefully acknowledge the financial support from the key research project of the National Key Research and Development Program of China (2016YFC1100401), the National Natural Science Foundation of China (51705507) and the Young Elite Scientists Sponsor Ship Program by CAST (2017QNRC001).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ma, S., Zhang, X., Yu, B. et al. Brushing up functional materials. NPG Asia Mater 11, 24 (2019). https://doi.org/10.1038/s41427-019-0121-2
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41427-019-0121-2
This article is cited by
-
Liquid-like polymer lubricating surfaces: Mechanism and applications
Nano Research (2024)
-
Potential of brush and mushroom conformations in biomedical applications
Chemical Papers (2024)
-
Composite lubricating layer with enhanced wear-resistant properties between HXLPE and Cu/ZrO2 ceramic friction interface
Journal of Materials Science (2024)
-
Surface Modification Strategies for Biomedical Applications: Enhancing Cell–Biomaterial Interfaces and Biochip Performances
BioChip Journal (2023)
-
Study on the Grafting Polyelectrolyte on Cross-Linked Polyethylene Surface and Its Biotribological Behaviors
Journal of Bio- and Tribo-Corrosion (2023)
