
Abstract
Animal performance fundamentally influences behaviour, ecology, and evolution. It typically varies monotonously with size. A notable exception is maximum running speed; the fastest animals are of intermediate size. Here we show that this peculiar allometry results from the competition between two musculoskeletal constraints: the kinetic energy capacity, which dominates in small animals, and the work capacity, which reigns supreme in large animals. The ratio of both capacities defines the physiological similarity index Γ, a dimensionless number akin to the Reynolds number in fluid mechanics. The scaling of Γ indicates a transition from a dominance of muscle forces to a dominance of inertial forces as animals grow in size; its magnitude defines conditions of “dynamic similarity“ that enable comparison and estimates of locomotor performance across extant and extinct animals; and the physical parameters that define it highlight opportunities for adaptations in musculoskeletal “design” that depart from the eternal null hypothesis of geometric similarity. The physiological similarity index challenges the Froude number as prevailing dynamic similarity condition, reveals that the differential growth of muscle and weight forces central to classic scaling theory is of secondary importance for the majority of terrestrial animals, and suggests avenues for comparative analyses of locomotor systems.
Similar content being viewed by others

Introduction
The variation of locomotor performance with animal size is of substantial ecological and evolutionary importance, and has thus long been a topic of interest in comparative animal physiology and biomechanics1,2,3,4,5,6. Empirical data show that maximum running speed increases up to a critical body mass and then decreases—the fastest runners are of intermediate size (Fig. 1). This pattern is a noteworthy outlier among scaling relationships, which typically are monotonous and satisfactorily described by simple power laws7,8; it has consequentially attracted persistent attention6,9,10,11,12,13,14,15,16,17,18,19. What explains the peculiar allometry of maximum running speed?

a Schematic of a minimalistic physical model of a musculoskeletal system, defined by the muscle work density, Wρ, the muscle fascicle length, lm, the maximum muscle strain rate, \({\dot{\varepsilon }}_{max}\), the muscle mass, mm, the gear ratio G and the mass m that is moved. Terrestrial locomotion also involves the gravitational acceleration g. b The performance space of this minimalistic system is fully characterised by two dimensionless numbers: the physiological similarity index, \(\Gamma \sim m{({l}_{m}{\dot{\varepsilon }}_{max})}^{2}{({W}_{\rho }{m}_{m})}^{-1}{G}^{-2}\), and the reduced parasitic energy, \({\kappa }_{g} \sim mg{({F}_{max}G)}^{-1}\). Γ quantifies the competition between the kinetic energy and work capacity of muscle: for Γ ≤ 1, the system can only deliver a fraction Γ of its maximum work capacity, and for Γ ≥ 1 it has access to its full work capacity (solid line). For a muscle force that is independent of muscle strain rate, the transition between these regimes is sharp and occurs at a body mass mt (see (d)); if the muscle has force-velocity properties, it is more gradual (dot-dashed line). κg quantifies the fraction of muscle work which flows into kinetic vs gravitational potential energy. The energy demanded by gravity only becomes appreciable for large κg, eventually resulting in a sharp asymptote at a critical body mass, mc, at which movement is no longer possible (grey dashed line, see (d)). c Both dimensionless numbers vary systematically with size for geometrically similar animals (Γ ∝ m2/3 and κg ∝ m1/3). As a consequence of the increase of Γ, larger animals have access to a larger fraction of their work capacity and are thus generally faster. However, due to the increase in κg, an increasingly larger share of this work has to pay for fluctuations in gravitational potential energy, eventually resulting in a reduction in speed (see (b)). d The combination of both effects results in the peculiar allometry of maximum running speed (n = 633); the black dashed line is a least-square fit of Eq. (5), leaving only a dimensionless scaling coefficient as free parameter (see text). Γ thus emerges as a fundamental dimensionless number for musculoskeletal dynamics, which may be used and interpreted akin to the Reynolds number (see discussion). The three short solid lines illustrate asymptotic scaling relations defined by three alternative indices of ‘dynamic similarity'', vHi ∝ m1/3, vFr ∝ m1/6 and vBo ∝ vSt ∝ m0 (see text). Source data for (d) are provided as a Source Data file.
A common starting point for the mechanistic analysis of scaling relationships are similarity arguments that lead to characteristic dimensionless numbers20,21. An increment in speed v of a body with mass m implies that work W was done, so that a general dimensionless number for speed is:
Specific scaling predictions then depend on the origin of the work W, and each distinct origin defines a dimensionless index of ‘dynamic similarity’, Πi. Animals that use the same source of work move with equal Πi, and, in that sense, each Πi may be interpreted as a concrete hypothesis on the physical origin of motion, which can then be tested against empirical data. In walking, for example, the gravitational potential energy (Epot) of the centre-of-mass (CoM) is cyclically exchanged for kinetic energy (Ekin), so that W = mgΔL, where g is the gravitational acceleration, and ΔL is the characteristic fraction of the leg length over which the CoM drops as the animal ‘falls’ forward during each step. The associated dynamic similarity index is \({\Pi }_{{{{{{{{\rm{Fr}}}}}}}}}={v}^{2}{\left(g\Delta L\right)}^{-1}={{{{{{{{\rm{Fr}}}}}}}}}^{2}\) – the square of the Froude number, Fr, introduced to terrestrial locomotion in seminal work by Alexander22. The Froude number predicts vFr ∝ m1/6 for geometrically similar animals, and is the appropriate dynamic similarity index when Epot and Ekin fluctuate out-of-phase during stance23. It consequently cannot be used to predict speed for bouncing gaits such as running or hopping, for Epot and Ekin now fluctuate in-phase during stance instead23. This in-phase fluctuation resembles the motion of a mass on a spring, which has invited the proposition that W = Eela ∝ kΔL2; kinetic energy is traded with the elastic strain energy (Eela), cyclically stored in and released from a conceptual spring with spring constant k, deformed by a maximal characteristic displacement ΔL. The associated dynamic similarity index is \({\Pi }_{{{{{{{{\rm{St}}}}}}}}}\propto m{v}^{2}{(k\Delta {L}^{2})}^{-1}={{{{{{{{\rm{St}}}}}}}}}^{2}\)—the square of a Strouhal number, St, implicitly applied to bouncing gaits in seminal work by Blickhan24. For geometrically similar animals, the Strouhal number predicts \({v}_{{{{{{{{\rm{St}}}}}}}}}\propto \sqrt{k/m}\Delta L\propto {m}^{0}={{{{{{{\rm{constant}}}}}}}}\), which only holds in a narrow body mass region (Fig. 1). Thus, neither of the two established dynamic similarity indices provides a complete account for the non-monotonous scaling of maximum running speed. Explaining the origin of this peculiar allometry with simple similarity arguments in the spirit of previous pioneering work is the core aim of this study.
Results
Perhaps remarkably, muscle—the ubiquitous animal motor—plays no or at most an implicit role in classic dynamic similarity theory. What constrains the speed in movements directly actuated by muscle? One limit has been suggested in some of the earliest work on animal biomechanics1,2,25: each unit mass of muscle mm, the argument goes, can deliver no more than a characteristic amount of mass-specific work, Wρ. Introducing the ratio mf between muscle mass (mm) and driven mass (m), mf = mm/m, yields the similarity index \({\Pi }_{{{{{{{{\rm{Bo}}}}}}}}}\propto {v}^{2}{({W}_{\rho }{m}_{f})}^{-1}\propto {{{{{{{{\rm{Bo}}}}}}}}}^{2}\)—proportional to the square of the Borelli-number, Bo26. Much like the Strouhal number, the Borelli-number predicts a mass-invariant speed for geometrically similar animals, \({v}_{{{{{{{{\rm{Bo}}}}}}}}}\propto \scriptstyle\sqrt{{W}_{\rho }{m}_{f}}\propto {m}^{0}={{{{{{{\rm{constant}}}}}}}}\). Consequently, the Borelli-number, too, does not provide a satisfactory explanation for the observed allometry of maximum running speed.
The shortcoming of the Borelli number is well appreciated in the literature, and a good many alternatives have been proposed [see e.g.14,18,27,28,29,30]. The most popular idea has been that a fixed power density of muscle defines a speed limit distinct from the Borelli-limit, a line of thought which goes back to seminal work by Bennet-Clark in the 1970s27, and which has been followed and developed further by several others since [e.g.14,18,28,31,32,33,34]. We will discuss the concept of a power limit to speed in detail separately35, and note briefly that a finite power density cannot be linked to speed using only the moved mass—any limit to speed implies an explicit constraint on work output, and a variation in muscle power is thus neither necessary nor sufficient to alter the maximum possible speed. It has been argued that large animals cannot utilise the full work capacity of their muscles because they are limited by a supposed maximum anaerobic capacity17. However, the implementation of this physiological argument is beset by physical and mathematical errors [see Supplementary Discussion 1 and ref. 19]. Recently, and as an alternative to a supposed power limit, it was suggested that muscle may be prevented from delivering its maximum work capacity because it cannot contract faster than with a characteristic maximum strain rate, \({\dot{\varepsilon }}_{max}\)26. Where motion is directly actuated by muscle, this muscle strain rate is coupled to the speed thus imparted, and muscle work output is consequently bound by its ‘kinetic energy capacity’, \(W\propto m{l}_{m}^{2}{\dot{\varepsilon }}_{max}^{2}{G}^{-2}\), where G is the gear ratio of the musculoskeletal system, and lm is a characteristic muscle fascicle length (Fig. 1a). The associated dynamic similarity index follows as \({\Pi }_{{{{{{{{\rm{Hi}}}}}}}}}\propto {\left(Gv\right)}^{2}{\left({l}_{m}{\dot{\varepsilon }}_{max}\right)}^{-2}={{{{{{{{\rm{Hi}}}}}}}}}^{2}\)—the square of the Hill-number, Hi26. The constraint encoded by the Hill-number may appear reminiscent of the suggestion that muscle ‘force-velocity effects’ limit work output in smaller animals30,36; it is however qualitatively distinct, for even a muscle which generates a force that remains constant up to a critical shortening velocity is bound by it. Movement with equal Hill-numbers implies running speeds that scale as vHi ∝ lm ∝ m1/3 for geometrically similar animals19,26, close to what is observed in lightweight animals [Fig. 1 and e.g. refs. 10,14,19,37], but incorrect for heavy animals.
In isolation, neither the Borelli- nor the Hill-number account for the peculiar allometry of maximum running speed. This shortcoming can be resolved by recognising that both dynamic similarity indices define an absolute limit on muscle mechanical output—the realised speed increment can be no larger than whichever of the two predicted increments is smaller26. Because the Hill- and the Borelli-limit scale differently for geometrically similar animals, vHi ∝ m1/3 vs. vbo ∝ m0, there exists a transition mass, mT, at which the limiting speeds they predict are equal [a conceptually similar idea, based on a limiting power density, was first presented in ref. 28. For further details, see ref. 26]. A direct calculation on the basis of empirical data suggests mt ≈ 54 kg (see Methods), a physical prediction firmly grounded in first principles, and situated between statistical estimates based on polynomial models [mt ≈ 119 kg, see ref. 6], or linear breakpoint regressions [mt ≈ 31 kg, see ref. 38]. Animals lighter than mt are Hill-limited and speed consequently increases with size in this regime; animals heavier than mt are Borelli-limited, and speed is now independent of size (Fig. 1a–c). This pattern begins to qualitatively resemble the peculiar allometry of maximum running speed (solid line in Fig. 1b), but two noteworthy discrepancies remain: running speed does not remain constant in heavy animals, but instead decreases; and the scaling of running speed in animals of intermediate body mass is in fact shallower than vHi ∝ m1/3 6,39.
To explain the decrease of speed in the heaviest terrestrial animals, we note that the work in Eq. (1) is strictly the work done by the net force, Fnet. But muscle is practically never the sole determinant of the net force, and instead has to frequently act against ‘parasitic’ forces (P), so that Fnet = FmG − P. As a consequence, only some muscle work flows into kinetic energy; the rest is lost to parasitic energy instead [26,29, and see Fig. 1b, c]. This work loss must be accounted for in Eq. (1):
Here, Wp is the work done by the parasitic force, and \(\kappa=P{F}_{max}^{-1}{G}^{-1}\) is the reduced parasitic energy, a dimensionless number which characterises the extent to which muscle work is ‘consumed’ by external forces [Fmax is the maximum force muscle can exert. See Fig. 1b, c and ref. 26]. For terrestrial locomotion, the key parasitic force is the gravitational force, Pg = mg, so that \({\kappa }_{g}=mg{\left({F}_{max}G\right)}^{-1}\propto {m}^{1/3}\) for geometrically similar animals [losses to drag are negligible, see19]. Equation (2) leaves no room for ambiguity: the possible speed increment is zero for κg = 1. The driving force FmaxG is then equal to the opposing force mg, and the system is in static equilibrium—a force-limit to muscle-driven motion, which occurs at a critical mass mc = FmaxGg−1 (or about 15 t, see methods). En route to this asymptote, the speed drops gently at first but then with an increasing rate (grey dashed line in Fig. 1b), qualitatively and quantitatively consistent with the empirical data (Fig. 1d).
In search for the mechanistic underpinning of the shallower scaling in animals with a body mass close to but below mt, we propose two non-mutually exclusive explanations. First, we note that there is robust evidence that the musculoskeletal gear ratio, G, breaks with geometric similarity in some animal groups—large quadrupedal mammals tend to have larger gear ratios than small quadrupedal mammals, G ∝ m0.16 [Fig. 2 and refs. 40,41,42,43]. The Hill-number then predicts \({v}_{{{{{{{{\rm{Hi}}}}}}}}}\propto {l}_{m}{\dot{\varepsilon }}_{max}{G}^{-1}\propto {m}^{1/3}{m}^{-0.16}\propto {m}^{0.17}\), in close agreement with scaling coefficients reported for mammals [v ∝ m0.17 and v ∝ m0.16, see refs. 6,10]. Second, we make explicit the thus far implicit assumption that the muscle force is independent of muscle strain (ε), and strain rate (\(\dot{\varepsilon }\)). This simplification is common and convenient, but only yields first order approximations. A simple implementation of more realistic muscle properties assigns a linear force-strain rate relationship, \({F}_{m}(\dot{\varepsilon })={F}_{max}(1-\dot{\varepsilon }{\dot{\varepsilon }}_{max}^{-1})\) [for more complex calculations, see e.g. refs. 19,26,36], and assumes a maximum muscle strain so small that muscle effectively remains on the plateau of the force-strain curve, Fm(ε) ≈ Fmax44,45,46. Because the force–strain relationship carries no new physical parameters, its effect cannot be assessed via simple dimensional arguments; the maximum work output can however be evaluated directly via conservation of energy, which yields a maximum speed [see ref. 26, and SI]:
Here, W is the Lambert-W function. The speed predicted by Eq. (3) cannot exceed the Hill limit, but it can be smaller: the difference is determined by the magnitude of the ‘physiological similarity index’ Γ26:
Γ is the squared ratio between the Borelli and the Hill number, and was already leaned on implicitly to calculate the transition mass, mt—the mass for which the Hill- and Borelli-number are equal, i.e. Γ = 1. Γ quantifies the extent to which muscle work output is limited by the maximum kinetic energy capacity, \({E}_{\max }\), or by the work density, \({W}_{\max }\) [see Fig. 1b, c and ref. 26, for a more extensive interpretation of Γ]. The Hill-Borelli number, Hi-Bo = v vHi-Bo−1, reduces to the Hill- and the Borelli-number in the limit of small and large Γ, respectively; the effect of the force-strain rate relationship is that it smoothens the otherwise sharp transition between the Hill- and the Borelli-limit around Γ = 1 [see dot-dashed line in Fig. 1b and refs. 26,30,36]. As a consequence, the running speed of animals with a body mass close to but below Γ = 1 generally scales between vHi ∝ m1/3 and \({v}_{{{{{{{{\rm{Bo}}}}}}}}}\propto {{{{{{{\rm{constant}}}}}}}}\)—a manifestation of ‘force-velocity-effects’30,36 that is in robust agreement with empirical data (Fig. 1d).
Gravity demands a reduction in absolute speed for heavy animals in the Borelli-limit, and size-specific variations in gear ratio and force-velocity effects reduce the speed in animals of intermediate weight in the Hill-limit; these effects may also be assessed in combination. Equation (3) then gains two additional terms that account for the loss of work to gravitational potential energy, and for the truncation of the strain rate accessible to muscle [see Supplementary Note 1 and also refs. 26,47,48,49]:
Equation (5) reduces to Eq. (3) for κg → 0 (i.e. for small animals), and is the main result of this paper, for it combines all elements of the preceding stepwise analysis. It paints the following mechanistic picture of the peculiar allometry of maximum running speed: for small animals, the kinetic energy capacity of muscle far exceeds its work capacity, Γ < < 1, and gravity only demands a small toll, κG < < 1; dynamic similarity is defined in terms of approximately equal Hill-numbers, animals run with approximately equal ratios of muscle strain rate to gear ratio, and v ∝ m1/3. In practise, and for all but the lightest animals, the scaling is reduced further by positive allometry of the gear ratio, and by the work loss arising from the force-strain rate relationship26,30,36; animals move with approximately equal Hill-Borelli numbers, and the maximum achievable strain rate slowly decreases with body mass. As soon as animals exceed the transition mass m > mT, the work capacity of muscle is larger than its the kinetic energy capacity, Γ > 1, so that speed remains approximately constant; animals now run with approximately equal Borelli-numbers, and thus approximately equal mass-specific work output. For even heavier animals, speed decreases at an ever-increasing rate, because an increasing fraction of the muscle work is consumed by the gravitational force, κg → 126,29. Eventually, at κg(mc) = 1, all animals can hope to achieve is to balance the gravitational force, no muscle-driven vertical movement is possible at all, and the speed plummets to zero.
In further support of this mechanical analysis, we next demonstrate that its qualitative scaling predictions can be rendered semi-quantitative. To this end, we once more draw from empirical estimates (Table 1), and directly predict the allometry of absolute maximum running speed. Because our analysis is based on dimensional considerations, it does not reveal numerical (non-dimensional) prefactors. We thus conduct a least-squares fit of Eq. (5) in log-space, using the empirical estimates provided in Table 1 as fixed input, and introduce a prefactor u as free parameter, which yields u = 8.11 (95% CI [7.69; 8.52]; Fig. 1d), i.e. the running speed predicted via Eq. (5) is about an order of magnitude too low. This discrepancy can be understood from first principles: The Hill- and the Borelli-number define a maximum speed increment that can result from a single contraction—but running animals can and do accelerate over multiple steps. During each step, some kinetic energy is lost to the collision of the leg with the ground50, and some is actively removed by negative muscle work to bring the instantaneous vertical centre-of-mass velocity temporarily to zero; the combined loss consequently needs to be resupplied. A minimalist plausible assumption is that a constant fraction of the current CoM velocity is removed with each step, i.e. that the effective coefficient of restitution (η) is independent of animal size and speed. The acceleration profile is then asymptotic, in agreement with empirical observations, and the maximum speed is related to η via vpeak ∝ vi(1 − η)−1 where vi is the maximum speed increment predicted by the relevant dynamic similarity index (see methods). We estimate η ≈ 0.885 from available data (95% CI [0.879; 0.890]), which corresponds to u = (1−η)−1 = 8.69 (95% CI [8.26; 9.09]), in robust agreement with the fitted estimate. We conclude that the prediction of the maximum running speed enabled by the addition of η to eq. (5) is in satisfactory qualitative and quantitative agreement with the empirically observed allometry of maximum running speed (see Fig. 1d).
Discussion
Animals small and large move by doing work with muscle, but the absolute maximum running speed they can achieve varies non-monotonously with size6. In principal agreement with previous related work14,18,19,28,36, we argue that this peculiar allometry arises because the limiting physical constraint changes with animal size; in distinction to this body of work, we submit that the two competing constraints are the kinetic energy and work capacity that characterise every musculoskeletal system. The competition between these two constraints is captured quantitatively by the physiological similarity index Γ26, which thus emerges as a fundamental dimensionless number that characterises muscle-driven motion across scales: small animals move with small Γ and can thus only run as fast as the kinetic energy capacity of their musculoskeletal system permits; large animals move with large Γ, and are consequently constrained by the work density of their muscle. In a sense, Γ is to musculoskeletal dynamics what the Reynolds number, Re, is to fluid mechanics, a suggestion of analogy we now frame with three brief examples.
Much like an increase in the Reynolds number indicates a transition from a dominance of viscous to a dominance of inertial forces, an inspection of Γ reveals a transition in the key physical ingredients that limit the dynamic mechanical output of muscle as animals get larger. Terrestrial scaling theory has traditionally focussed on the impact of the differential scaling of weight vs. muscle forces: Galileo famously speculated about size-specific variations in bone proportions51, and Haldane painted a picture of a giant so threatened by the risk of bone fracture that they were unable to move52. The theory that the need for size-invariant bone stresses has driven size-specific adjustments to skeletal anatomy and animal posture has become textbook material40,53; many have speculated that the same need is to be held responsible for the reduction in absolute maximum running speed in the largest terrestrial animals [e.g.10,15,16,54,55]. The analysis presented here challenges this perspective, for it suggests that a possible stress limitation to speed, imposed by the differential scaling of muscle and weight force, κg ∝ m1/3, is second to the effect of the differential scaling of the characteristic maximal inertial force \({F}_{ci}=ma\propto m{v}_{max}^{2}{\delta }_{max}^{-1}\)—the product of the body mass and a characteristic acceleration—and the maximal ground reaction force FGRF, \(\Gamma \propto {F}_{ci}{F}_{GRF}^{-1}\propto {m}^{2/3}\): inertial forces dominate muscle dynamics in large animals, but are of little relevance in small animals where accelerating muscle contractions become practically instantaneous. The competition between muscle and gravitational force does eventually demand a decrease in speed, but this decrease does not have to reflect a stress-mitigation strategy per se; it can occur simply because the monotonous increase of κg goes hand-in-hand with a change in the fraction of muscle work which flows into gravitational potential energy, \({W}_{g}{W}_{m}^{-1}={\kappa }_{g}\) vs kinetic energy, \({E}_{kin}{W}_{m}^{-1}=1-{\kappa }_{g}\) [Fig. 1b, c and ref. 26]. For a large 15 g insect, the gravitational force consumes a mere 1% of every unit of muscle work, for a geometrically similar and moderately large reptile of 20 kg it demands about 10%, and only for a geometrically similar large mammal heavier than about 2 t does the majority of muscle work flow into gravitational potential energy (Fig. 1b, c and see Supplementary Fig. 1a). We conclude that the variation of the ratio between weight and muscle force is likely inconsequential for all but the heaviest animals, because the gravitational force is small compared to the maximum ground reaction force by virtue of necessity; the majority of terrestrial animals can perhaps be considered gravitationally indifferent26,56,57,58.
A powerful application of the Reynolds number is the identification of conditions of dynamic similarity—experiments with very small or very large specimen can be impractical, but a suitable adjustment of the fluid viscosity enables accurate experiments with scaled models of more convenient size. In the same spirit, dimensional analyses of terrestrial locomotion may be used to predict characteristic gait parameters as a function of speed, to identify preferred speeds, to define characteristic speeds at which gait transitions occur, or even to estimate locomotor speed in extinct animals [e.g.5,22,39,59]. Indeed, meaningful comparison of locomotor performance across animals of different sizes is impossible without a similarity framework, and similarity arguments have consequently taken a central role in comparative work on animal locomotion. The dominant approach has relied on the Froude number, to the extent that dynamic similarity in terrestrial locomotion has become practically synonymous with equality of Froude numbers. It has been noted that the non-monotonous scaling of maximum running speed poses a threat to this line of argument [e.g.6,60]: preferred speeds and gait transition speeds tend to be proportional to the maximum sustained speed3,39, but the Froude number predicts a monotonous scaling. However, alternative suggestions have remained absent, and the problem has remained unresolved. The identification of Γ suggests a possible resolution of this conundrum: Γ can be defined as the ratio of two dynamic similarity indices, the Hill- and the Borelli-number, Γ = Bo2Hi−2 26: for Γ < < 1, dynamically similar gaits involve equal Hill-numbers, for Γ > > 1, they occur at equal Borelli-numbers, and at intermediate values of Γ ≈ 1, dynamically similar speeds occur at equal Hill-Borelli-numbers. These dynamic similarity conditions deviate meaningfully from the classic perspective painted by the Froude number, for the relevant index now varies with size. To illustrate the consequences of this shift in perspective, consider the classic work by Heglund and others, who demonstrated that quadrupeds with a body mass between 0.03 and 230 kg prefer to move with and change gaits at speeds that scale as v ∝ m0.18 − m0.22 3,39. This scaling is close to the prediction from the Froude number, vFr ∝ m1/6, but also close to the linearised scaling derived from the Hill-Borelli number in the same mass region, vHiBo ∝ m0.18 (extracted for the trot-gallop transition, see Supplementary Note 2 and Supplementary Fig. 1b). However, the two indices yield strikingly different predictions when they are extrapolated to much smaller or much larger animals: for a small insect with a weight of 10 mg, dynamic similarity in terms of the Froude number predicts a characteristic speed vFr = 0.26 m s−1, whereas the Hill-Borelli-number as defined by eq. (5) yields vHiBo = 0.04 m s−1—more than six times slower (see Supplementary Note 2 and Supplementary Fig. 1b). For a giant dinosaur of 40t, in turn, the Hill-Borelli-number suggests that no motion is possible without non-trivial musculoskeletal adaptations that break with geometric similarity, whereas the Froude number predicts neither a flattening nor a decrease in speed, and instead suggests that vFr = 10.2 m s−1 (see Supplementary Note 2 and Supplementary Fig. 1b). These examples are perhaps a naive but by no means an atypical application of the Froude number; an unconditional conflation of dynamic similarity with equality of Froude numbers is problematic, and may well yield equivalent speeds that are physiologically implausible, if not physically impossible60,61. We speculate that dynamic similarity in terrestrial locomotion may be better defined via equality of the Hill-Borelli-number, i.e. characteristic movements occur at equal fractions of the maximum possible performance—a hypothesis in need of further investigation.
Life at different Reynolds numbers promotes or even necessitates non-trivial adaptations in locomotor form and animal morphology. For example, jet propulsion becomes impractical at small Re due to excessive dissipation, and effective lift-based locomotion requires an Re larger than some critical intermediate value62. Similarly, life at different Γ comes with altered demands on musculoskeletal ‘design’. We briefly discuss two hypotheses on how this variation in physical demands may have resulted in non-trivial musculoskeletal adaptations in defiance of geometric similarity. First, we note that maximum speed is independent of muscle mass at small Γ. This prediction is noteworthy, for a variation in muscle mass alters the maximum net work and power the musculoskeletal system can deliver, and textbook scaling theory would consequently predict a concomitant decrease in maximum speed. But the maximum speed in the Hill-limit depends solely on the kinetic energy capacity, and is thus independent of maximal muscle work and power capacity. Selection on large muscles may thus be relaxed at small body sizes, but taxa with a lower muscle mass fraction mf are predicted to reach the Borelli-limit and the force limit at a lower critical mass. Consequently, such taxa should slow down at a lower body mass, and be limited to a smaller absolute size. Preliminary support for these hypotheses exists: mf is approximately geometrically similar within reptiles and mammals63,64, but reptiles have a mf about a factor of two lower than mammals64. And indeed, reptiles run with approximately equal maximum speed as mammals at small body sizes (Fig. 1), but slow down at a lower body mass16, and the largest extant reptile is about five times lighter than the largest extant mammal. A more quantitative test of this hypothesis is hampered by the absence of reliable maximum running speed measurements for reptiles larger than about 10 kg; of course, selection also does not act solely on maximum speed. Second, the functional significance of the gear ratio G changes with size: for small Γ, a smaller G maximises the kinetic energy capacity of the musculoskeletal system and thus the maximum speed. For large Γ, G merely controls whether a unit of net work is done by a large force and a small displacement or vice versa; it consequently leaves the possible work output unaffected. However, large animals also move with large κG, and G then also controls the partitioning of muscle work into Epot and Ekin26. As a result, a larger gear ratio now allows larger speeds with equal muscle work output, in remarkable contrast to the canonical interpretation of G as a parameter which controls force-velocity trade-offs. A deviation from geometrically similar gear ratios may also be beneficial for animals below the transition mass. Speed increases with size in this regime, demanding an equivalent increase in the body-mass-specific work output of muscle. How this increased work output is achieved is an open question, because it requires breaking with geometric similarity: a size-invariant gear ratio would assign all variation in work output to an increased muscle strain, which would then grow with substantial positive allometry. A small increase in the gear ratio reduces the maximum speed, in return for a substantial reduction of the necessary muscle strain. Small animals thus appear to benefit from small gear ratios, and large animals from large gear ratios—a pattern which resembles classic observations [we note that other non-mutually exclusive hypotheses on the benefit of scaling gear ratios exists, see e.g. refs. 40,41,65]. A robust assessment of the allometry of G, its mechanical effects, and identification of the functional demands which drive it, will have to await availability of a sufficiently large and phylogenetically diverse dataset, for the allometry of G is confounded by evolutionary history [see41, and methods]. However, the conclusion that the largest extinct animals will have moved with larger gear ratios appears a physical necessity: for a muscle mass fraction of about 20% across all limbs, comparable to that in extant quadrupeds and bipeds64, a gear ratio of G = 0.3 would result in static equilibrium at a body mass of about 15 t (assuming half of the limbs are in ground contact); this critical mass goes as mc ∝ G3, and a gear ratio of G = 1 would thus suffice to achieve static equilibrium in a giant dinosaur of about 500 t, about 6–10 times heaver than existing estimates for the mass of the largest dinosaur66.
The size-specific variation of Γ and κg has substantial consequences for the mechanical performance space accessible by muscle, and thus for ‘optimal’ musculoskeletal ‘design’ across animal size. Although the minimalist physical estimates presented in this work are rooted in first principles and show noticeable agreement with empirical observations, a mere consistency between a theory and the data it was constructed to explain ought not be mistaken for conclusive evidence—the available data carries uncertainty, simplifying assumptions and approximations introduce inaccuracies, the model includes many independent parameters, and alternative scaling arguments exist11,14,18,19,28. Extensive studies that integrate results from invertebrate and vertebrate taxa across a maximal size range and phylogenetic diversity are crucial to identifying adaptations to the challenges posed by the highlighted physical constraints; to so test theoretical prediction outside their original domain; to separate physical, developmental, and phylogenetic constraints; to advance our general understanding of the mechanical limits to terrestrial locomotion across animal size; and to ultimately explore the physical origin of similar patterns in the allometry of locomotor speed across running, flying and swimming animals17,67. The future of evolutionary biomechanics is bright.
Materials
Empirical data on maximum running speed
Data on maximum running speed was extracted from the literature6,10,12,17,37,61,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95,96,97,98,99,100,101,102, either directly from the text or tables where possible, or from figures, using Ankit Rohatgi’s WebPlotDigitizer.v 4.6 (automeris.io/WebPlotDigitizer, n = 632). All data is available in a Source Data File. There is no way of knowing whether any measured speed represents a true maximum, and it can be reasonably argued that the only reliable estimates come from race horses, race dogs, and elite human sprinters. We submit that this uncertainty is sufficiently trumped by the variation introduced by the variation in body mass, which spans 11 orders of magnitude. This argument is in keeping with common practice in the literature: the general trend that a cheetah is faster than both a mouse and an elephant appears challenging to call into question. One further limitation requires commentary: the assembled data combines ontogenetic, static and evolutionary allometry into one single data set, i.e. it lumps data from individuals of the same species at different ontogenetic levels; of individuals of the same species at the same ontogenetic level but different size; and of individuals from different species. There are strong reasons to believe that ontogenetic, static and evolutionary allometries can and do differ [e.g. refs. 62,64,103,104,105,106], but the physical constraints that are the subject of this work are invariant to evolutionary biology, and apply equally well to each of these three levels. Although the relative magnitude of the involved physical quantities may well differ across phylogenetically distant groups, it is hard if not impossible to break with geometric similarity over many decades of body mass, so that the lumped analysis we conduct is plausible at least to first order.
Empirical estimates for physical parameters of musculoskeletal systems
The physical analysis presented in the results has the advantage that it enables a direct quantitative estimation of the maximum running speed; it contains no empirical parameters void of physical meaning, and hence, in principle, does not require any statistical fitting routines. In order to provide a direct prediction, estimates for the relevant physical quantities were extracted from the literature (see Table 1), and we now briefly discuss critical aspects of this process.
First, and in general, the exact geometric similarity was assumed wherever available scaling exponents were consistent with or very close to this hypothesis (but see point three on the gear ratio). Geometric similarity is a parsimonious and plausible null hypothesis, and thus the obvious starting point. Second, we note that the fascicle length, lm is an equivalent fascicle length, equal to the fascicle length of a hypothetical muscle which has a volume and physiological cross-sectional area equal to the sum of that of all relevant limb muscles, averaged across all limbs [for further detail, see ref. 64]. In practice, this definition reflects the physical reality that the speed of individual contractile elements linked in series is additive. The physiological cross-sectional area then follows in analogy, as the ratio between total limb muscle volume and equivalent fascicle length64. Third, we estimate an average gear ratio G = 0.3 ± 0.2 from published data on 42 vertebrate species covering about five orders of magnitude in body mass [Fig. 2; data from41,42,43,107]. As is well established, the gear ratio increases significantly with size within quadrupedal mammals, G ∝ m0.16 [40,41, We note that this slope differs from the estimate reported in the original papers, as we included additional data.]. G is however approximately size-invariant within the bipedal, hopping Macropodoidea [G ∝ m0.004;107]. We used a size-invariant gear ratio as the initial guess for our across-clade analysis to adhere to the parsimonious assumption of geometric similarity, and because the allometry of the gear ratio appears to be clearly confounded by evolutionary history, so that extrapolation to groups not represented in the available data is likely unreliable [Fig. 2 and41]. Further quantitative interpretation and in particular extrapolation to animals outside the size range for which data is available can be conducted once a larger and more phylogenetically diverse dataset is available. The functional significance of a systematic variation of G with size, and its effect on maximum running speed, is critically evaluated in more detail in the results. Fourth and last, our analysis required estimation of an effective ‘coefficient of restitution’, η, which quantifies the speed loss from collisions and unavoidable fluctuations in the vertical centre-of-mass velocity that accompany each step. We first briefly derive the relation between the speed increment per step (vi), the effective coefficient of restitution (η), and the maximum possible speed (vpeak), and then estimate η directly from empirical data. All statistical analysis below or elsewhere in the manuscript was conducted in R v. 4.3.2 pr Python 3.

In the initial across-clade analysis of the allometry of maximum running speed—which included invertebrates much smaller than 0.01 kg and vertebrates heavier than 2 t—an average gear ratio, G = 0.3 (solid line) was used, because it complies with the parsimonious assumption of geometric similarity, and because the gear ratio is confounded by evolutionary history, as evidenced by the different slopes for quadrupedal mammals vs. bipedal Macropodoidea, so that extrapolation bears significant risks [dashed vs. dotted line41,107]. The assumption of a size-invariant gear ratio is subsequently relaxed for the size range for which experimental data are available, and the consequences of a size-variable gear ratio are discussed. Source data are provided as a Source Data file.
The effective coefficient of restitution
The Hill- and the Borelli-number provide upper bounds for the speed increment that can be achieved with a single contraction, but running animals accelerate over multiple steps. To estimate the absolute maximum running speed, an assumption is thus required on how these increments accumulate over a series of steps. If animals were able to add the same increment at every step without any intermediate loss of kinetic energy, the speed would simply be the product of the number of steps and the speed increment. However, every step is associated with collisional dissipation of energy by necessity50, and with a further loss of kinetic energy because the vertical centre-of-mass velocity must be instantaneously zero at some point during stance. As a result, a fraction of the speed is lost with each step and needs to be re-supplied by muscle work. A parsimonious assumption is that this fraction, 1 − η, is a constant independent of animal size and speed; initial empirical evidence in support of this assumption is provided below. A mathematical function can be constructed which encodes this assumption, and so describes the speed as a function of the step number, n, the loss factor, 1 − η, and the maximum speed increment, vi:
This expressions predicts an asymptotic acceleration profile, which mirrors empirical data [e.g. refs. 69,108, and see Fig. 3a]. The asymptotic maximum speed follows as vpeak = vi(1 − η)−1, which is the prediction leaned on in the results.

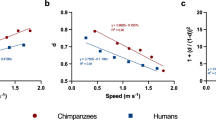
A quantitative estimation of the maximum achievable speed thus requires an assumption about how speed increments accumulate over multiple steps. a If the maximum positive speed increment per contraction is vi, and each step n loses a fixed fraction 1 − η of the current speed v, the predicted acceleration profile \(v={v}_{i}\left(1-{\eta }^{n}\right){\left((1-\eta )\right.}^{-1}\) resembles empirical data [see e.g. refs. 69,108], and the maximum speed is asymptotic to vi(1 − η)−1. b In order to estimate the effective coefficient of restitution η, we re-analysed data from refs. 61,109, and extracted stride sequences over which the average speed remained approximately constant. Within these sequences, the maximum speed \({v}_{\max }\) and minimum speed \({v}_{\min }\) were extracted for each step, and the step with the maximal ratio \({v}_{\min }{v}_{\max }^{-1}\) was selected for further analysis, as it presents an upper bound for the minimal kinetic energy loss. Each data point in the plot represents a different individual (n = 52); the data represent experimental trials involving 9 species of birds and 13 species of lizards, varying between 8 g and 80 kg in body mass. η was estimated from these data via an ordinary least-squares regression forced through the origin (hence the unusual shape of the confidence bands), which yielded η = 0.89 (95% CI [0.88, 0.92]). Source data are provided as a Source Data file.
In order to estimate η, we re-analysed data presented in refs. 61,109 for 9 species of birds and 13 species of lizards, varying between 8 g and 80 kg in body mass, and running at maximum speeds between 0.5 and 5.4 m s−1. We selected sequences of multiple strides over which the average centre-of-mass (CoM) velocity remained approximately constant, to exclude acceleration and deceleration periods, and then extracted the maximal ratio of the minimum and maximum CoM velocity from these strides as an idealised upper bound for η. η was then estimated as the slope of a zero-intercept ordinary least square regression of the minimum vs the maximum speed, which yielded η = 0.89 (95% CI [0.88, 0.92]), with a robust coefficient of determination R2 = 0.99 (see Fig. 3b). Although encouraging, this result should be considered approximate. A more detailed analysis that relies on experiments designed for this analysis is required to derive firm conclusions about the variation of η with phylogeny, animal size, and speed.
Estimation of the transition mass between the Hill- and the Borelli-limit
Animals transition from the Hill- to the Borelli-limit when the speeds predicted by both are equal, i.e. when \(\Gamma={v}_{{{{{{{{\rm{Hi}}}}}}}}}^{2}{v}_{{{{{{{{\rm{Bo}}}}}}}}}^{-2}=1\). Using the estimates provided in Table 1 yields Γ = 0.07 m2/3 kg−2/3, which is unity for mT = (1/0.07)3/2 ≈ 54 kg.
Estimation of the critical mass
The critical mass is the mass at which the maximal ground reaction force exactly balances the weight force, or in other words the mass for which κg = 1; the mechanical system is then in static equilibrium. Using the estimates provided in Table 1 yields κg = 0.041 m1/3 kg−1/3, so that mc = (1/0.041)3 ≈ 15 t. This upper bound is close to the maximum body mass estimate of 18 t for the largest extinct terrestrial mammals, proboscideans110. For a larger gear ratio of G = 1, κg = 0.0125, and mt ≈ 500 t; the critical mass is extremely sensitive to the gear ratio, and goes as its cube.
Work partitioning into kinetic and gravitational potential energy
The reduced parasitic energy \({\kappa }_{g}=mg{({F}_{max}G)}^{-1}\) can be directly related to the fraction of work which flows into gravitational potential vs kinetic energy, \({W}_{g}{W}_{m}^{-1}={\kappa }_{g}\) vs \({E}_{kin}{W}_{m}^{-1}=1-{\kappa }_{g}\), respectively26. Using the estimates in Table 1 yields κg = 0.041 m1/3 kg−1/3, which for body masses of m = 15 g, 15 kg and 2 t yields \({W}_{g}{W}_{m}^{-1}=1\%\), 10% and 52%, and accordingly \({E}_{kin}{W}_{m}^{-1}=99\%\), 90% and 48%, respectively. The consumption of muscle work by gravitational potential energy remains below 10% for animals with a body mass below 10 kg, and the majority of terrestrial animals may thus be considered gravitationally indifferent (Supplementary Fig. 1a).
Reporting summary
Further information on research design is available in the Nature Portfolio Reporting Summary linked to this article.
Data availability
All Source data are provided as a Source Data file. Source data are provided with this paper.
References
Thompson, D. W. On Growth and Form, Vol. 2 (Cambridge University Press, 1917).
Hill, A. V. The dimensions of animals and their muscular dynamics. Science Progress 38, 209–230 (1950).
Heglund, N. C., Taylor, C. R. & McMahon, T. A. Scaling stride frequency and gait to animal size: Mice to horses. Science 186, 1112–1113 (1974).
McMahon, T. A. Using body size to understand the structural design of animals: quadrupedal locomotion. J. Appl. Physiol. 39, 619–627 (1975).
Alexander, R. M. & Jayes, A. S. A dynamic similarity hypothesis for the gaits of quadrupedal mammals. J. Zool. 201, 135–152 (1983).
Garland, T. The relation between maximal running speed and body mass in terrestrial mammals. J. Zool. 199, 157–170 (1983).
McMahon, T. A., Bonner, J. T. & Freeman, W. On Size and Life (Scientific American Library New York, 1983).
Schmidt-Nielsen, K. Scaling: Why is Animal Size so Important? (Cambridge University Press, 1984).
Farley, C. T., Glasheen, J. & McMahon, T. A. Running springs: speed and animal size. J. Exp. Biol. 185, 71–86 (1993).
Iriarte-Díaz, J. Differential scaling of locomotor performance in small and large terrestrial mammals. J. Exp. Biol. 205, 2897 (2002).
Bejan, A. & Marden, J. H. Unifying constructal theory for scale effects in running, swimming and flying. J Exp Biol. 209, 238–248 (2006).
Clemente, C. J., Thompson, G. G. & Withers, P. C. Evolutionary relationships of sprint speed in australian varanid lizards. J. Zool. 278, 270–280 (2009).
Clemente, C. J., Withers, P. C. & Thompson, G. Optimal body size with respect to maximal speed for the yellow-spotted monitor lizard (varanus panoptes; varanidae). Physiol. Biochem. Zool. 85, 265–273 (2012).
Meyer-Vernet, N. & Rospars, J.-P. Maximum relative speeds of living organisms: why do bacteria perform as fast as ostriches? Phys. Biol. 13, 066006 (2016).
Fuentes, M. A. Theoretical considerations on maximum running speeds for large and small animals. J. Theoret. Biol. 390, 127–135 (2016).
Dick, T. J. & Clemente, C. J. Where have all the giants gone? how animals deal with the problem of size. PLoS Biol. 15, e2000473 (2017).
Hirt, M. R., Jetz, W., Rall, B. C. & Brose, U. A general scaling law reveals why the largest animals are not the fastest. Nat. Ecol. Evol. 1, 1116–1122 (2017).
Usherwood, J. R. & Gladman, N. W. Why are the fastest runners of intermediate size? contrasting scaling of mechanical demands and muscle supply of work and power. Biol. Lett. 16, 20200579 (2020).
Günther, M. et al. Rules of nature’s formula run: Muscle mechanics during late stance is the key to explaining maximum running speed. J. Theoret. Biol. 523, 110714 (2021).
Stahl, W. R. Similarity and dimensional methods in biology. Science 137, 205–212 (1962).
Gunther, B. Dimensional analysis and theory of biological similarity. Physiol. Rev. 55, 659–699 (1975).
Alexander, R. M. Estimates of speeds of dinosaurs. Nature 261, 129–130 (1976).
Cavagna, G. A., Heglund, N. C. & Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol.-Regul. Integr. Comp. Physiol. 233, R243–R261 (1977).
Blickhan, R. The spring-mass model for running and hopping. J. Biomech. 22, 1217–1227 (1989).
Borelli, G. A. De Motu Animalium (Rome, 1680).
Labonte, D. A theory of physiological similarity for muscle-driven motion. PNAS 120, e2221217120 (2023).
Bennet-Clark, H. Scale effects in jumping animals. In Pedley, T. J. (ed.) Scale Effects in Animal Locomotion, 185–201 (Academic Press London/New York, 1977).
Gabriel, J. M. The effect of animal design on jumping performance. J. Zool. 204, 533–539 (1984).
Scholz, M. N., Bobbert, M. F. & Van Soest, A. K. Scaling and jumping: gravity loses grip on small jumpers. J. Theoret. Biol. 240, 554–561 (2006).
Bobbert, M. F. Effects of isometric scaling on vertical jumping performance. PLOS One 8, e71209 (2013).
Marsh, R. & John-Alder, H. Jumping performance of hylid frogs measured with high-speed cine film. J. Exp. Biol. 188, 131–141 (1994).
Meyer-Vernet, N. & Rospars, J.-P. How fast do living organisms move: Maximum speeds from bacteria to elephants and whales. Am. J. Phys. 83, 719–722 (2015).
Sutton, G. P., Doroshenko, M., Cullen, D. A. & Burrows, M. Take-off speed in jumping mantises depends on body size and a power-limited mechanism. J. Exp. Biol. 219, 2127 (2016).
Hawkes, E. W. et al. Engineered jumpers overcome biological limits via work multiplication. Nature 604, 657–661 (2022).
Labonte, D. & Holt, N. Beyond power limits: the kinetic energy capacity of skeletal muscle. bioRxiv 2024.03.02.583090 https://doi.org/10.1101/2024.03.02.583090 (2024).
Sutton, G. P. et al. Why do large animals never actuate their jumps with latch-mediated springs? because they can jump higher without them. Integr. Comp. Biol. 59, 1609–1618 (2019).
Boehm, C., Schultz, J. & Clemente, C. Understanding the limits to the hydraulic leg mechanism: the effects of speed and size on limb kinematics in vagrant arachnids. J. Comp. Physiol. A 207, 105–116 (2021).
Chappell, R. Fitting bent lines to data, with applications to allometry. J. Theoret. Biol. 138, 235–256 (1989).
Heglund, N. C. & Taylor, C. R. Speed, stride frequency and energy cost per stride: how do they change with body size and gait? J. Exp. Biol. 138, 301–318 (1988).
Biewener, A. A. Scaling body support in mammals: limb posture and muscle mechanics. Science 245, 45–48 (1989).
Biewener, A. A. Biomechanical consequences of scaling. J. Exp. Biol. 208, 1665–1676 (2005).
Ren, L., Miller, C. E., Lair, R. & Hutchinson, J. R. Integration of biomechanical compliance, leverage, and power in elephant limbs. Proc. Natl Acad. Sci. 107, 7078–7082 (2010).
Basu, C. & Hutchinson, J. R. Low effective mechanical advantage of giraffes’ limbs during walking reveals trade-off between limb length and locomotor performance. Proc. Natl Acad. Sci. 119, e2108471119 (2022).
Roberts, T. J., Marsh Richard, L., Weyand Peter, G. & Richard, T. C. Muscular force in running turkeys: the economy of minimizing work. Science 275, 1113–1115 (1997).
Biewener, A. A., Konieczynski, D. D. & Baudinette, R. V. In vivo muscle force-length behavior during steady-speed hopping in tammar wallabies. J. Exp. Biol. 201, 1681–1694 (1998).
Daley, M. A. & Biewener, A. A. Muscle force-length dynamics during level versus incline locomotion: a comparison of in vivo performance of two guinea fowl ankle extensors. J. Exp. Biol. 206, 2941–2958 (2003).
Aerts, P. & Nauwelaerts, S. Environmentally induced mechanical feedback in locomotion: frog performance as a model. J. Theoret. Biol. 261, 372–378 (2009).
Richards, C. T. & Sawicki, G. S. Elastic recoil can either amplify or attenuate muscle-tendon power, depending on inertial vs. fluid dynamic loading. J. Theoret. Biol. 313, 68–78 (2012).
Clemente, C. J. & Richards, C. Muscle function and hydrodynamics limit power and speed in swimming frogs. Nat. Commun. 4, 2737 (2013).
Ruina, A., Bertram, J. E. A. & Srinivasan, M. A collisional model of the energetic cost of support work qualitatively explains leg sequencing in walking and galloping, pseudo-elastic leg behavior in running and the walk-to-run transition. J Theoret. Biol. 237, 170–192 (2005).
Galilei, G. Dialogues Concerning Two New Sciences (Lodewijk Elzevir, 1638).
Haldane, J. B. S. On being the right size. Harper’s Mag. 152, 424–427 (1926).
McMahon, T. Size and shape in biology: elastic criteria impose limits on biological proportions, and consequently on metabolic rates. Science 179, 1201–1204 (1973).
Taylor, C. Energy cost of animal locomotion. In Bolis, L., Schmidt-Nielsen, K. & Maddrell, S. H. P. (eds.) Comparative Physiology, 23–41 (North Holland Publishing Co. Amsterdam, 1973).
Rubin, C. T. & Lanyon, L. E. Dynamic strain similarity in vertebrates; an alternative to allometric limb bone scaling. J. Theoret. Biol. 107, 321–327 (1984).
Taylor, C. R., Caldwell Sandra, L. & Rowntree, V. J. Running up and down hills: Some consequences of size. Science 178, 1096–1097 (1972).
Birn-Jeffery, A. V. & Higham, T. E. The scaling of uphill and downhill locomotion in legged animals. Integr. Comp. Biol. 54, 1159–1172 (2014).
Halsey, L. G. & White, C. R. A different angle: comparative analyses of whole-animal transport costs when running uphill. J. Exp. Biol. 220, 161–166 (2017).
Hutchinson, J. R. & Garcia, M. Tyrannosaurus was not a fast runner. Nature 415, 1018 (2002).
Hutchinson, J. R. The evolutionary biomechanics of locomotor function in giant land animals. J. Exp. Biol. 224, jeb217463 (2021).
Bishop, P. J. et al. The influence of speed and size on avian terrestrial locomotor biomechanics: predicting locomotion in extinct theropod dinosaurs. PLOS One 13, e0192172 (2018).
Vogel, S. Modes and scaling in aquatic locomotion. Integr. Comp. Biol. 48, 702–712 (2008).
Cieri, R. L., Dick, T. J. M. & Clemente, C. J. Monitoring muscle over three orders of magnitude: Widespread positive allometry among locomotor and body support musculature in the pectoral girdle of varanid lizards (varanidae). J. Anat. 237, 1114–1135 (2020).
Bishop, P. J., Wright, M. A. & Pierce, S. E. Whole-limb scaling of muscle mass and force-generating capacity in amniotes. PeerJ 9, e12574 (2021).
Usherwood, J. R. Constraints on muscle performance provide a novel explanation for the scaling of posture in terrestrial animals. Biol. Lett. 9, 20130414 (2013).
Carballido, J. L. et al. A new giant titanosaur sheds light on body mass evolution among sauropod dinosaurs. Proc. R. Soc. B Biol. Sci. 284, 20171219 (2017).
Sánchez-Rodríguez, J., Raufaste, C. & Argentina, M. Scaling the tail beat frequency and swimming speed in underwater undulatory swimming. Nat. Commun. 14, 5569 (2023).
Alexander, R. M., Langman, V. A. & Jayes, A. S. Fast locomotion of some African ungulates. J. Zool. 183, 291–300 (1977).
Elliott, J. P., Cowan, I. M. & Holling, C. Prey capture by the African lion. Can. J. Zool. 55, 1811–1828 (1977).
Miller, P. L. A possible sensory function for the stop–go patterns of running in phorid flies. Physiol. Entomol. 4, 361–370 (1979).
Auffenberg, W. The Behavioral Ecology of the Komodo Monitor University Presses of Florida. (University Presses of Florida: Gainesville, 1981).
Forsythe, T. G. Locomotion in ground beetles (coleoptera carabidae): An interpretation of leg structure in functional terms. J. Zool. 200, 493–507 (1983).
Bleckmann, H. & Barth, F. G. Sensory ecology of a semi-aquatic spider (dolomedes triton). Behav. Ecol. Sociobiol. 14, 303–312 (1984).
Evans, M. E. G. & Forsythe, T. G. A comparison of adaptations to running, pushing and burrowing in some adult coleoptera: especially carabidae. J. Zool. 202, 513–534 (1984).
Nicolson, S. W., Bartholomew, G. A. & Seely, M. K. Ecological correlates of locomotion speed, morphometries and body temperature in three namib desert tenebrionid beetles. South Afr. J. Zool. 19, 131–134 (1984).
Marsh, A. C. Microclimatic factors influencing foraging patterns and success of the thermophilic desert ant, Ocymyrmex barbiger. Insectes Sociaux 32, 286–296 (1985).
Full, R., Blickhan, R. & Ting, L. Leg design in hexapedal runners. J. Exp. Biol. 158, 369–390 (1991).
Gorb, S. N. & Barth, F. G. Locomotor behavior during prey-capture of a fishing spider, dolomedes plantarius (araneae: Araneidae): Galloping and stopping. The J. Arachnol. 22, 89–93 (1994).
Ting, L. H., Blickhan, R. & Full, R. J. Dynamic and static stability in hexapedal runners. J. Exp. Biol. 197, 251–269 (1994).
Zollikofer, C. P. E. Stepping patterns in ants: I. influence of speed and curvature. J. Exp. Biol. 192, 95–106 (1994).
Kamoun, S. & Hogenhout, S. Flightlessness and rapid terrestrial locomotion in tiger beetles of the cicindela l. subgenus rivacindela van nidek from saline habitats of Australia (coleoptera: Cicindelidae). Coleopterists’ Bull. 50, 221–230 (1996).
Gilbert, C. Visual control of cursorial prey pursuit by tiger beetles (cicindelidae). J. Comp. Physiol. A 181, 217–230 (1997).
Wilson, G. R. Australian Camel Racing. Canberra: Rural Industries Research, (Rural Industries Research and Development Corporation, 1999).
Amaya, C. C., Klawinski, P. D. & Formanowicz, D. R. The effects of leg autotomy on running speed and foraging ability in two species of wolf spider, (lycosidae). Am. Midl. Nat. 145, 201–205 (2001).
Van Damme, R. & Vanhooydonck, B. Origins of interspecific variation in lizard sprint capacity. Funct. Ecol. 15, 186–202 (2001).
Christiansen, P. Locomotion in terrestrial mammals: the influence of body mass, limb length and bone proportions on speed. Zool. J. Linn. Soc. 136, 685–714 (2002).
Williams, T. M. et al. Running energetics of the North American river otter: do short legs necessarily reduce efficiency on land? Comp. Biochem. Physiol. Part A Mol. Integr. Physiol. 133, 203–12 (2002).
Hutchinson, J. R., Famini, D., Lair, R. & Kram, R. Are fast-moving elephants really running? Nature 422, 493–494 (2003).
Apontes, P. & Brown, C. A. Between-sex variation in running speed and a potential cost of leg autotomy in the wolf spider pirata sedentarius. Am. Midl. Nat. 154, 115–125 (2005).
Nelson, M. K. & Formanowicz, D. R. Relationship between escape speed and flight distance in a wolf spider, hogna carolinensis (walckenaer 1805). J. Arachnol. 33, 153–158 (2005).
Dangles, O., Ory, N., Steinmann, T., Christides, J.-P. & Casas, J. Spider’s attack versus cricket’s escape: velocity modes determine success. Anim. Behav. 72, 603–610 (2006).
Hutchinson, J. R. et al. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812–3827 (2006).
Schmidt, W. Reptiles and Amphibians of Southern Africa (Struik, 2006).
Hurlbert, A. H., Ballantyne, F. & Powell, S. Shaking a leg and hot to trot: the effects of body size and temperature on running speed in ants. Ecol. Entomol. 33, 144–154 (2008).
Prenter, J., Pérez-Staples, D. & Taylor, P. W. Functional relations between locomotor performance traits in spiders and implications for evolutionary hypotheses. BMC Res. Notes 3, 306 (2010).
Wu, G. C., Wright, J. C., Whitaker, D. L. & Ahn, A. N. Kinematic evidence for superfast locomotory muscle in two species of teneriffiid mites. J. Exp. Biol. 213, 2551 (2010).
Spagna, J. C., Valdivia, E. A. & Mohan, V. Gait characteristics of two fast-running spider species (hololena adnexa and hololena curta), including an aerial phase (araneae: Agelenidae). J. Arachnol. 39, 84–92 (2011).
McGinley, R. H., Prenter, J. & Taylor, P. W. Whole-organism performance in a jumping spider, Servaea incana (Araneae: Salticidae):links with morphology and between performance traits. Biol. J. Linnean Soc. 110, 644–657 (2013).
Bonner, J. T. Size and Cycle: an Essay on the Structure of Biology, Vol. 2087 (Princeton University Press, 2015).
de Albuquerque, R. L., Bonine, K. E. & Garland, T. J. Speed and endurance do not trade off in phrynosomatid lizards. Physiol. Biochem. Zool. 88, 634–47 (2015).
Rubin, S., Young, M. H.-Y., Wright, J. C., Whitaker, D. L. & Ahn, A. N. Exceptional running and turning performance in a mite. J Exp Bio 219, 676–685 (2016).
Weihmann, T., Brun, P.-G. & Pycroft, E. Speed dependent phase shifts and gait changes in cockroaches running on substrates of different slipperiness. Front. Zool. 14, 54 (2017).
Peattie, A. M. & Full, R. J. Phylogenetic analysis of the scaling of wet and dry biological fibrillar adhesives. PNAS 104, 18595–18600 (2007).
Labonte, D. et al. Extreme positive allometry of animal adhesive pads and the size limits of adhesion-based climbing. PNAS 113, 1297–1302 (2016).
Cieri, R. L., Dick, T. J. M., Morris, J. S. & Clemente, C. J. Scaling of fibre area and fibre glycogen concentration in the hindlimb musculature of monitor lizards: implications for locomotor performance with increasing body size. J. Exp. Biol. 225, jeb243380 (2022).
Püffel, F., Roces, F. & Labonte, D. Strong positive allometry of bite force in leaf-cutter ants increases the range of cuttable plant tissues. J. Exp. Biol. 226, jeb245140 (2023).
Bennett, M. B. & Taylor, G. C. Scaling of elastic strain energy in kangaroos and the benefits of being big. Nature 378, 56–9 (1995).
Huey, R. B. & Hertz, P. E. Effects of body size and slope on acceleration of a lizard (stellio stellio). J. Exp. Biol. 110, 113–123 (1984).
Cieri, R. L., Dick, T. J. M., Irwin, R., Rumsey, D. & Clemente, C. J. The scaling of ground reaction forces and duty factor in monitor lizards: implications for locomotion in sprawling tetrapods. Biol. Lett. 17, 20200612 (2021).
Larramendi, A. Shoulder height, body mass, and shape of proboscideans. Acta Palaeontol. Pol. 61, 537–574 (2015).
Josephson, R. K. Contraction dynamics and power output of skeletal muscle. Annu. Rev. Physiol. 55, 527–546 (1993).
Medler, S. Comparative trends in shortening velocity and force production in skeletal muscles. Am. J. Physiol.-Regul. Integr. Comp. Physiol. 283, R368–R378 (2002).
Mendez, J. & Keys, A. Density and composition of mammalian muscle. Metab. Clin. Exp. 9, 184–188 (1960).
Alexander, R. M. Principles of Animal Locomotion (Princeton University Press, 2003).
Rospars, J.-P. & Meyer-Vernet, N. Force per cross-sectional area from molecules to muscles: a general property of biological motors. R. Soc. Open Sci. 3, 160313 (2016).
Biewener, A. & Patek, S. Animal locomotion (Oxford University Press, 2018).
Alexander, R. The maximum forces exerted by animals. J. Exp. Biol. 115, 231–238 (1985).
Acknowledgements
This study was supported by an ARC Discovery Grant (DP180100220) to C.J.C. and D.L., and a Human Frontier Science Programme Young Investigator Award (RGY0073/2020) to D.L. This research has received funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme (grant agreement no. 851705, to D.L.).
Author information
Authors and Affiliations
Contributions
D.L.: developed theory; analysed data; made all figures; contributed toward conceptualisation, data, and interpretation; wrote the manuscript. P.J.B.: contributed toward conceptualisation, data, and interpretation; commented on manuscript drafts. T.J.M.D.: contributed toward conceptualisation, data, and interpretation; commented on manuscript drafts. C.J.C.: contributed toward conceptualisation, data, and interpretation; commented on manuscript drafts.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Médéric Argentina, Jeffrey Olberding and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Source data
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Labonte, D., Bishop, P.J., Dick, T.J.M. et al. Dynamic similarity and the peculiar allometry of maximum running speed. Nat Commun 15, 2181 (2024). https://doi.org/10.1038/s41467-024-46269-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-024-46269-w
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
