
Abstract
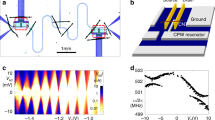
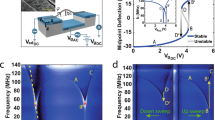
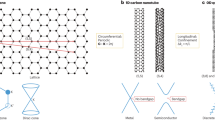
Carbon nanotubes1,2 can be distinctly metallic or semiconducting depending on their diameter and chirality3. Here we show that continuously varying the chirality by mechanical torsion4 can induce conductance oscillations, which can be attributed to metal–semiconductor periodic transitions. The phenomenon is observed in multiwalled carbon nanotubes, where both the torque5 and the current are shown to be carried predominantly by the outermost wall6,7. The oscillation period with torsion is consistent with the theoretical shifting8 of the corners of the first Brillouin zone of graphene across different sub-bands allowed in the nanotube. Beyond a critical torsion, the conductance irreversibly drops due to torsional failure, allowing us to determine the torsional strength of carbon nanotubes. Carbon nanotubes could be ideal torsional springs for nanoscopic pendulums4,9,10, because electromechanical detection of motion could replace the microscopic detection techniques used at present. Our experiments indicate that carbon nanotubes could be used as electronic sensors of torsional motion in nanoelectromechanical systems11.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 12 print issues and online access
$259.00 per year
only $21.58 per issue
Buy this article
- Purchase on SpringerLink
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout




Similar content being viewed by others
References
Iijima, S. Helical microtubules of graphitic carbon. Nature 354, 56–58 (1991).
Dresselhaus, M. S., Dresselhaus, G. & Avouris, P. Carbon nanotubes (Springer, Berlin, 2001).
Mintmire, J. W., Dunlapp, B. I. & White, C. T. Are fullerene tubules metallic Phys. Rev. Lett. 68, 631–634 (1992).
Joselevich, E. Twisting nanotubes: From torsion to chirality. ChemPhysChem 7, 1405–1407 (2006).
Williams, P. A. et al. Torsional response and stiffening of individual multiwalled carbon nanotubes. Phys. Rev. Lett. 89, 255502 (2002).
Bachtold, A. et al. Aharonov–Bohm oscillations in carbon nanotubes. Nature 397, 673–675 (1999).
Poncharal, P., Berger, C., Yi, Y., Wang, Z. L. & de Heer, W. A. Room temperature ballistic conduction in carbon nanotubes. J. Phys. Chem. B 106, 12104–12118 (2002).
Yang, L. & Han, J. Electronic structure of deformed carbon nanotubes. Phys. Rev. Lett. 85, 154–157 (2000).
Papadakis, S. J. et al. Resonant oscillators with carbon-nanotube torsion springs. Phys. Rev. Lett. 93, 146101 (2004).
Meyer, J. C., Paillet, M. & Roth, S. Single-molecule torsional pendulum. Science 309, 1539–1541 (2005).
Craighead, H. G. Nanoelectromechanical systems. Science 290, 1532–1535 (2000).
Sazonova, V. et al. A tunable carbon nanotube electromechanical oscillator. Nature 431, 284–287 (2004).
Rueckes, T., Kim, K., Joselevich, E., Tseng, G. Y., Cheung, C. L. & Lieber, C. M. Carbon nanotube-based non-volatile random access memory for molecular computing. Science 289, 94–97 (2000).
Maiti, A. Bandgap engineering with strain. Nature Mater. 2, 440–442 (2003).
Tombler, T. W. et al. Reversible electromechanical characteristics of carbon nanotubes under local-probe manipulation. Nature 405, 769–772 (2000).
Minot, E. D. et al. Tuning carbon nanotube band gaps with strain. Phys. Rev. Lett. 90, 156401 (2003).
Gómez-Navarro, C., de Pablo, P. J. & Gómez-Herrero, J. Radial electromechanical properties of carbon nanotubes. Adv. Mater. 16, 549–552 (2004).
Semet, V. et al. Reversible electromechanical characteristics of multiwalled carbon nanotubes. Appl. Phys. Lett. 87, 223103 (2005).
Rochefort, A., Avouris, P., Lesage, F. & Salahub, D. R. Electrical and mechanical properties of distorted carbon nanotubes. Phys. Rev. B 60, 13824–13830 (1999).
Bailey, S. W. D., Tománek, D., Kwon, Y.-K. & Lambert, C. J. Giant magneto-conductance in twisted carbon nanotubes. Europhys. Lett. 59, 75–80 (2002).
Liang, W. et al. Fabry-Perot interference in a nanotube electron waveguide. Nature 411, 665–669 (2001).
Buitelaar, M. R., Bachtold, A., Nussbaumer, T., Iqbal, M. & Schönenberger, C. Multiwall carbon nanotubes as quantum dots. Phys. Rev. Lett. 88, 156801 (2002).
Fennimore, A. M. et al. Rotational actuators based on carbon nanotubes. Nature 424, 408–410 (2003).
Bourlon, B., Glattli, D. C., Miko, C., Forró, L. & Bachtold, A. Carbon nanotube based bearing for rotational motions. Nano Lett. 4, 709–712 (2004).
Büttiker, M., Imry, Y., Landauer, R. & Pinhas, S. Generalized many-channel conductance formula with application to small rings. Phys. Rev. B 31, 6207–6215 (1985).
Heinze, S. et al. Carbon nanotubes as Schottky barrier transistors. Phys. Rev. Lett. 89, 106801 (2002).
Stojetz, B., Miko, C., Forró, L.. & Strunk, C. Effect of band structure on quantum interference in multiwall carbon nanotubes. Phys. Rev. Lett. 94, 186802 (2005).
Roche, S., Triozon, F., Rubio, A. & Mayou, D. Conduction mechanisms and magnetotransport in multiwalled carbon nanotubes. Phys. Rev. B 64, 121401 (2001).
Sawada, Y. & Shindo, A. Torsional properties of carbon fibers. Carbon 30, 619–629 (1992).
Ertekin, E. & Chrzan, D. C. Ideal torsional strengths and stiffnesses of carbon nanotubes. Phys. Rev. B 72, 045425 (2005).
Acknowledgements
We thank D. Shahar, A. Stern, Y. Oreg and L. Kronik for helpful discussions, and A. Yoffe, K. Gartsman, and O. Yeger for assistance with the clean-room and electron-microscopy facilities. This research was supported by the Israel Science Foundation, the Kimmel Center for Nanoscale Science, and the Djanogly and Alhadeff foundations. E.J. holds the Victor Erlich Career Development Chair.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Supplementary Information
Supplementary methods, figures S1-S2, tables S1-S2 and movie legend (PDF 473 kb)
Supplementary Information
Supplementary movie (MOV 1857 kb)
Rights and permissions
About this article
Cite this article
Cohen-Karni, T., Segev, L., Srur-Lavi, O. et al. Torsional electromechanical quantum oscillations in carbon nanotubes. Nature Nanotech 1, 36–41 (2006). https://doi.org/10.1038/nnano.2006.57
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/nnano.2006.57
This article is cited by
-
Robot-aided fN∙m torque sensing within an ultrawide dynamic range
Microsystems & Nanoengineering (2021)
-
Nanorobotic System iTRo for Controllable 1D Micro/nano Material Twisting Test
Scientific Reports (2017)
-
Performance comparison of zero-Schottky-barrier and doped contacts carbon nanotube transistors with strain applied
Nano-Micro Letters (2010)
-
Electromechanical response of single-walled carbon nanotubes to torsional strain in a self-contained device
Nature Nanotechnology (2007)
