
Abstract
Ants travelling to and fro between their nest and a foraging area may follow stereotyped foodward and homeward routes that are guided by different visual and directional memory sequences1,2,3,4,5,6. Honeybees are known to fly a feeder-to-hive or hive-to-feeder vector according to whether or not they have recently fed — their feeding state controls which compass direction they select7. We show here that the feeding state of the wood ant Formica rufa also determines the choice between an outward or inward journey, but by priming the selective retrieval of visual landmark memories.
Similar content being viewed by others


Main
We trained the ants along a foraging route in which the appearance of a landmark differed on the ants' foodward and homeward paths. The ants ran 1 m from a start-pot to a drop of sucrose, both of which lay 20 cm from a black wall that was 2 m long and 20 cm high. They were guided by the remembered appearance of the wall8, which was to their left on the way to food and to their right on the way home. (For methods, see supplementary information.)
To investigate the role of feeding state in priming visual memories for the foodward or homeward route, trained ants that had either been fed or left unfed were placed individually in a start-pot midway along the wall (Fig. 1a). Unfed ants walked so that they viewed the wall on their left (59 out of 63 paths from 23 ants); fed ants viewed the wall on their right (56 of 61 paths from 20 ants). The wall was regularly rotated during training and the visual scene was identical for fed and unfed ants. We conclude that the ants' feeding state, rather than the compass orientation or panoramic context, determines whether foodward or homeward memories are primed.

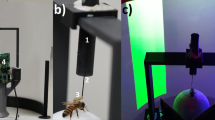
a, Individual trajectories of unfed and previously fed ants released from a start-pot (white circle). Thick line indicates the mean path, with 95% confidence interval (CI) plotted every 10 cm. b, Trajectories of ants when the start-pot is placed midway between two walls. The exit from the start-pot is at the top of the figure. Fed ants left in the direction of the exit; unfed ants circled the pot before choosing a direction. c, Y-shaped maze (dotted lines indicate front wall) with different patterns for homeward and foodward routes (see supplementary information). Distance from Y junction to pattern, 33 cm. d, Ants' performance on foodward and homeward journeys in training, showing mean choices of 11 ants (95% CI).
Ants did not just learn fixed motor patterns (for example, to turn left when fed) as the paths were the same, irrespective of whether the exit from the ants' start-pot faced the wall (as in training) or faced away. Ants placed midway between two identical walls 80 cm apart (Fig. 1b) walked closer to the left wall when unfed (20 of 20 paths, 9 ants) and to the right wall when fed (22 of 22 paths, 9 ants), thereby matching the route-specific visual memory that was primed by their feeding state.
In a second experiment, ants learned a foraging route in which they ran twice through the same ‘Y’ maze, first to reach food and then to be returned to the nest. Each arm of the ‘Y’ led to a different visual pattern (Fig. 1c). One of the two patterns signalled the way to food, and the other the way home. Training patterns were frequently switched between sides. Ants learned to choose the foodward pattern when unfed and the homeward pattern after feeding (Fig. 1d).
In unrewarded tests, unfed or previously fed ants made two journeys through the maze. On both journeys, ants chose the foodward pattern when unfed (first journey, 41 out of 44 correct; second, 37 of 41 correct) and the homeward pattern when fed (first journey, 38 of 43 correct; second, 25 of 28 correct) (all P<0.0001). We conclude that the ants' visual memories were primed by feeding state and not by the sequence of rewarded patterns.
Although ants are rigid in sticking to familiar routes, they are like honeybees in that they show flexibility in choosing between routes. The selective priming of visual and vector memories specific to a particular route is an important component of this flexibility7,9,10,11,12,13.
References
Santschi, F. Rev. Suisse Zool. 21, 347–425 (1913).
Collett, T. S., Dillmann, E., Giger, A. & Wehner, R. J. Comp. Physiol. A 170, 435–442 (1992).
Wehner, R., Michel, B. & Antonsen, P. J. Exp. Biol. 199, 129–140 (1996).
Collett, M., Collett, T. S., Bisch, S. & Wehner, R. Nature 394, 269–272 (1998).
Bisch-Knaden, S. & Wehner, R. J. Comp. Physiol. A 189, 181–187 (2003).
Kohler, M. & Wehner, R. Neurobiol. Learn. Mem. 83, 1–12 (2005).
Dyer, F. C., Gill, M. & Sharbowski, J. Naturwissenschaften 89, 262–264 (2002).
Graham, P. & Collett, T. S. J. Exp. Biol. 205, 2499–2509 (2002).
Wahl, O. Z. Vergleich. Physiol. 16, 529–589 (1932).
Koltermann, R. Z. Vergleich. Physiol. 75, 49–68 (1971).
Menzel, R., Geiger, K., Joerges, J., Müller, U. & Chittka, L. Anim. Behav. 55, 139–152 (1998).
Reinhard, J., Srinivasan, M. V., Guez, D. & Zhang, S. W. J. Exp. Biol. 207, 4371–4381 (2004).
Beugnon, G., Lachaud, J. -P. & Chagné, P. J. Insect Behav. 18, 415–432 (2005).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Supplementary Information
(DOC 33 kb)
Rights and permissions
About this article
Cite this article
Harris, R., de Ibarra, N., Graham, P. et al. Priming of visual route memories. Nature 438, 302 (2005). https://doi.org/10.1038/438302a
Published:
Issue Date:
DOI: https://doi.org/10.1038/438302a
This article is cited by
-
Innate visual attraction in wood ants is a hardwired behavior seen across different motivational and ecological contexts
Insectes Sociaux (2022)
-
Spatial cognition in the context of foraging styles and information transfer in ants
Animal Cognition (2020)
-
Homing in a tropical social wasp: role of spatial familiarity, motivation and age
Journal of Comparative Physiology A (2017)
-
Context-dependent navigation in a collectively foraging species of ant, Messor cephalotes
Insectes Sociaux (2013)
-
Garden ant homing behavior in a maze task based on local visual cues
Insectes Sociaux (2013)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
