
Abstract
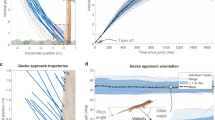
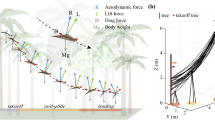
In 1969, a palaeontologist proposed1 that theropod dinosaurs used their tails as dynamic stabilizers during rapid or irregular movements, contributing to their depiction as active and agile predators. Since then the inertia of swinging appendages has been implicated in stabilizing human walking2,3, aiding acrobatic manoeuvres by primates4,5,6,7,8 and rodents9, and enabling cats to balance on branches10. Recent studies on geckos11,12,13 suggest that active tail stabilization occurs during climbing, righting and gliding. By contrast, studies on the effect of lizard tail loss show evidence of a decrease, an increase or no change in performance14,15. Application of a control-theoretic framework could advance our general understanding of inertial appendage use in locomotion. Here we report that lizards control the swing of their tails in a measured manner to redirect angular momentum from their bodies to their tails, stabilizing body attitude in the sagittal plane. We video-recorded Red-Headed Agama lizards (Agama agama) leaping towards a vertical surface by first vaulting onto an obstacle with variable traction to induce a range of perturbations in body angular momentum. To examine a known controlled tail response, we built a lizard-sized robot with an active tail that used sensory feedback to stabilize pitch as it drove off a ramp. Our dynamics model revealed that a body swinging its tail experienced less rotation than a body with a rigid tail, a passively compliant tail or no tail. To compare a range of tails, we calculated tail effectiveness as the amount of tailless body rotation a tail could stabilize. A model Velociraptor mongoliensis supported the initial tail stabilization hypothesis1, showing as it did a greater tail effectiveness than the Agama lizards. Leaping lizards show that inertial control of body attitude can advance our understanding of appendage evolution and provide biological inspiration for the next generation of manoeuvrable search-and-rescue robots.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout



Similar content being viewed by others

References
Ostrom, J. H. Osteology of Deinonychus antirrhopus, an unusual theropod from the Lower Cretaceous of Montana. Bull. Peabody Mus. Nat. Hist. (Paris) 30, 68–80,–144 (1969)
Pijnappels, M. et al. Armed against falls: the contribution of arm movements to balance recovery after tripping. Exp. Brain Res. 201, 689–699 (2010)
Roos, P. E. et al. The role of arm movement in early trip recovery in younger and older adults. Gait Posture 27, 352–356 (2008)
Dunbar, D. C. Aerial maneuvers of leaping lemurs: the physics of whole-body rotations while airborne. Am. J. Primatol. 16, 291–303 (1988)
Larson, S. G. & Stern, J. T. Maintenance of above-branch balance during primate arboreal quadrupedalism: coordinated use of forearm rotators and tail motion. Am. J. Phys. Anthropol. 129, 71–81 (2006)
Günther, M. M., Ishida, H., Kumakura, H. & Nakano, Y. The jump as a fast mode of locomotion in arboreal and terrestrial biotopes. Z. Morphol. Anthropol. 78, 341–372 (1991)
Demes, B. et al. Body size and leaping kinematics in Malagasy vertical clingers and leapers. J. Hum. Evol. 31, 367–388 (1996)
Peters, A. & Preuschoft, H. in Biology of Tarsiers (ed. Niemitz, C.) 227–255 (Fischer, 1984)
Bartholomew, G. A. & Caswell, H. H. Locomotion in kangaroo rats and its adaptive significance. J. Mamm. 32, 155–169 (1951)
Walker, C. et al. Balance in the cat: role of the tail and effects of sacrocaudal transection. Behav. Brain Res. 91, 41–47 (1998)
Jusufi, A., Goldman, D. I., Revzen, S. & Full, R. J. Active tails enhance arboreal acrobatics in geckos. Proc. Natl Acad. Sci. USA 105, 4215–4219 (2008)
Jusufi, A., Kawano, D. T., Libby, T. & Full, R. J. Righting and turning in mid-air using appendage inertia: reptile tails, analytical models and bio-inspired robots. Bioinspir. Biomim. 5, 045001 (2010)
Jusufi, A., Zeng, Y., Full, R. J. & Dudley, R. Aerial righting reflexes in flightless animals. Integr. Comp. Biol. 51, 937–943 (2011)
Bateman, P. W. & Fleming, P. A. To cut a long tail short: a review of lizard caudal autotomy studies carried out over the last 20 years. J. Zool. (Lond.) 277, 1–14 (2009)
Gillis, G. B., Bonvini, L. A. & Irschick, D. J. Losing stability: tail loss and jumping in the arboreal lizard Anolis carolinensis. J. Exp. Biol. 212, 604–609 (2009)
Chang-Siu, E., Libby, T., Tomizuka, M. & Full, R. J. in IEEE/RSJ Internat. Conf. Intelligent Robots Systems 2011 1887–1894 (IEEE, 2011)
Berkemeier, M. D. & Fearing, R. S. Control of a two-link robot to achieve sliding and hopping gaits. IEEE Trans. Robot. Autom. 1, 286–291 (1992)
Mather, T. W. & Yim, M. in IEEE/RSJ Internat. Conf. Intelligent Robots Systems 2009 5905–5910 (IEEE, 2009)
Hyun Soo, P. et al. in IEEE Internat. Conf. Robotics Automation 2009 2655–2660 (IEEE, 2009)
Saunders, A. et al. The RiSE climbing robot: body and leg design. Proc. SPIE 6230, 623017 (2006)
Alexander, R. M. Dinosaur biomechanics. Proc. R. Soc. B 273, 1849–1855 (2006)
Paul, G. S. The Princeton Field Guide to Dinosaurs 137 (Princeton Univ. Press, 2010)
Paul, G. S. Dinosaurs of the Air: the Evolution and Loss of Flight in Dinosaurs and Birds 45 (Johns Hopkins Univ. Press, 2002)
Carrier, D. R. et al. Influence of rotational inertia on turning performance of theropod dinosaurs: clues from humans with increased rotational inertia. J. Exp. Biol. 204, 3917–3926 (2001)
Sellers, W. I. & Manning, P. L. Estimating dinosaur maximum running speeds using evolutionary robotics. Proc. R. Soc. B 274, 2711–2716 (2007)
Dowling, J. J. et al. The uncertainty of the pendulum method for the determination of the moment of inertia. Med. Eng. Phys. 28, 837–841 (2006)
Acknowledgements
We thank P. Jennings for video editing and figure production, T. Full for digitizing the lizard video and K. Padian for his advice on the dinosaur reconstruction and capability. We thank O. O’Reilly, S. Sponberg and N. Sapir for advice on analysis. This work was supported by a US NSF FIBR grant to R.J.F., a MAST CTA grant to R.J.F, an NSF IGERT under award DGE-0903711 and a Swiss NSF Fellowship to A.J.
Author information
Authors and Affiliations
Contributions
T.L. designed the study and robot, carried out experiments, analysed data and wrote initial drafts of the manuscripts. T.Y.M. designed the study, carried out animal experiments and worked out kinematics. E.C.-S. designed and constructed the robot, carried out experiments and derived the analytical model. D.L. carried out experiments and worked out kinematics. D.J.C. designed experiments and collected and analysed animal kinematic data. A.J. designed and performed experiments and analysed data. R.J.F. directed the project, defined the analysis and wrote the final version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Supplementary Information
This file contains Supplementary Tables 1-2, Supplementary Figures 1 and legend and legends for Supplementary Movies 1-5. (PDF 254 kb)
Supplementary Movie 1
This move shows a side view of a lizard, A. agama, leaping to a vertical surface from a high-friction vault – see Supplementary Information file for full legend. (MOV 3774 kb)
Supplementary Movie 2
This movie shows a side view of a lizard, A. agama, leaping to a vertical surface from a low-friction vault - see Supplementary Information file for full legend. (MOV 2814 kb)
Supplementary Movie 3
This movie shows a side view of the robot driving off an inclined ramp without feedback control - see Supplementary Information file for full legend. (MOV 4143 kb)
Supplementary Movie 4
This movie shows a side view of robot driving off an inclined ramp with an active tail - see Supplementary Information file for full legend. (MOV 4365 kb)
Supplementary Movie 5
This movie shows a side view of a lizard, A. agama, leaping to a vertical surface from a high-friction vault - see Supplementary Information file for full legend. (MOV 3484 kb)
Rights and permissions
About this article
Cite this article
Libby, T., Moore, T., Chang-Siu, E. et al. Tail-assisted pitch control in lizards, robots and dinosaurs. Nature 481, 181–184 (2012). https://doi.org/10.1038/nature10710
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/nature10710
This article is cited by
-
How a serpentine tail assists agile motions of kangaroo rats: a dynamics and control approach
Nonlinear Dynamics (2023)
-
Jumping of flea beetles onto inclined platforms
Journal of Comparative Physiology A (2023)
-
Peking geckos (Gekko swinhonis) traversing upward steps: the effect of step height on the transition from horizontal to vertical locomotion
Journal of Comparative Physiology A (2022)
-
Jumping with adhesion: landing surface incline alters impact force and body kinematics in crested geckos
Scientific Reports (2021)
-
Dynamic modeling, analysis, and comparative study of a quadruped with bio-inspired robotic tails
Multibody System Dynamics (2021)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
