
Abstract
Many practical systems can be described by dynamic networks, for which modern technique can measure their outputs, and accumulate extremely rich data. Nevertheless, the network structures producing these data are often deeply hidden in the data. The problem of inferring network structures by analyzing the available data, turns to be of great significance. On one hand, networks are often driven by various unknown facts, such as noises. On the other hand, network structures of practical systems are commonly nonlinear, and different nonlinearities can provide rich dynamic features and meaningful functions of realistic networks. Although many works have considered each fact in studying network reconstructions, much less papers have been found to systematically treat both difficulties together. Here we propose to use high-order correlation computations (HOCC) to treat nonlinear dynamics; use two-time correlations to decorrelate effects of network dynamics and noise driving; and use suitable basis and correlator vectors to unifiedly infer all dynamic nonlinearities, topological interaction links and noise statistical structures. All the above theoretical frameworks are constructed in a closed form and numerical simulations fully verify the validity of theoretical predictions.
Similar content being viewed by others


Introduction
In recent decades, the topic of dynamical complex networks has attracted great attention in interdisciplinary fields due to its theoretical importance and practical significance1,2. Network dynamics is determined in great extent by network structures, mainly classified by dynamics of local nodes and interactions between network nodes. In many practical cases, we can measure outputs of network nodes while structures of networks are often deeply hidden in the measured data. Therefore, it turns to be crucial to develop effective methods to infer network structures from the available data of nodes. This is the so-called inverse problem of network reconstruction, which has become one of the most important topics in the data analysis of complex networks in wide crossing fields, particularly in biological and social sciences3,4,5,6,7.
Various methods have been proposed to treat network reconstruction problems8. There are several typical difficulties in practice. First, in most of realistic cases diverse facts, such as noises, are involved in the data production. These noises make the structure inference difficult because they are unknown on one hand, and essentially influence the data analysis on the other hand. Different statistical methods based on various correlation computations have been suggested to treat the noise problem9,10,11,12,13,14. Second, in almost all realistic network systems various nonlinearities play crucial roles in generating diverse characteristic features and significant functions. So far most of works in treating network inference have made approximations either neglecting noise influences15,16,17,18,19,20,21,22,23,24,25, or considering linear dynamics and interactions9,10,11,12,13,14. These methods fail when both noise effects and nonlinearities of network structures are crucial for the data production. There have been few works treating the two difficulties jointly26,27,28,29,30, among which the Bayesian approach was used to estimate noise levels and dynamic parameters. In particular, a method of improved Bayesian method has been suggested for reconstruction of stochastic nonlinear dynamical model by iterating a number of coupled and nonlinear matrix equations with unknown dynamical parameters and noise statistical quantities28,29,30. The algorithm is analytical, but complicated if networks are large and noises at different nodes are coupled and multiplicative.
In this presentation we consider the problem of reconstruction of noise-driven nonlinear dynamic networks. The key points in dealing with the difficulties are: We compute high-order correlations to treat possible nonlinear structures; We use two-time correlations to separate the reconstructions of dynamical networks and noise statistics to two independent steps, and finally the computation of inference of noise-driven nonlinear networks has been converted to simple linear and algebraic matrix equations. In the first part of the section Results and Discussion, the idea and the method how to use high-order correlation computation (HOCC) to infer nonlinear dynamic networks are explained, including inferring all the internal node dynamics, mutual interactions and statistical structures of multiplicative noises. In the next part we first apply the HOCC method to a simple three-node network, the well known Lorenz equation, driven by white additive and multiplicative noises. And then large noise-driven complex networks with diverse nonlinear local dynamics and complicated links between nodes are considered. The effectiveness of the HOCC algorithm are well justified for both model networks. In the third part networks with complicated nonlinear phase dynamics, nonlinear interactions and nonlinear multiplicative noises are investigated. The HOCC method also works well in this more complicated case. To the end some conclusion and perspective of practical applications of the method are given. In the section of Materials and Methods, some details on the calculation of statistics of multiplicative noises are specified. Moreover, the problems how to treat measurement noises and colored noises and how reconstruction errors of the HOCC method depend on data length, system size and choice of basis sets are also briefly discussed (see Supplementary Information).
Results and Discussion
Inferring nonlinear networks by using high-order and two-time correlations: theory
Let us consider a general noise-driven nonlinear network

where T represents the operation of transposition. Dynamical noises Γi(t), i = 1, 2,  , N, represent the impacts from microscopic world, and they are expected to have very short correlation time τd ≪ 1, much smaller than the characteristic time of deterministic dynamics assumed to be of order 1. Then noises are approximated as white ones,
, N, represent the impacts from microscopic world, and they are expected to have very short correlation time τd ≪ 1, much smaller than the characteristic time of deterministic dynamics assumed to be of order 1. Then noises are approximated as white ones,

with i, j = 1, 2,  , N. It is emphasized that multiplicative noises have been seldom considered so far in the study of network reconstruction, though this type of noises exist extensively in practical circumstances31,32,33,34. In Eq. (1) we have all measurable data in our hand, namely, we measure
, N. It is emphasized that multiplicative noises have been seldom considered so far in the study of network reconstruction, though this type of noises exist extensively in practical circumstances31,32,33,34. In Eq. (1) we have all measurable data in our hand, namely, we measure

With Δt ≪ 1 we can compute velocities of x in Eq. (1) and with  we have sufficiently large samples to perform statistical analysis. These conditions are not always available, but they do be available in many important practical experiments, or can be realized on purpose in case of need in many realistic measurements.
we have sufficiently large samples to perform statistical analysis. These conditions are not always available, but they do be available in many important practical experiments, or can be realized on purpose in case of need in many realistic measurements.
In Eq. (1) all functions fi, i = 1, 2,  , N, are unknown. The noise statistic matrix
, N, are unknown. The noise statistic matrix  is also unknown. Only the output variables (3) are available for analysis. The task is to specify dynamic functions fi, and noise statistics Qij, i, j = 1,
is also unknown. Only the output variables (3) are available for analysis. The task is to specify dynamic functions fi, and noise statistics Qij, i, j = 1,  , N.
, N.
First we assume fis can be generally expanded by a certain basis set16,24,30,35

where all constant coefficients Ai,μ, μ = 1, 2,  , Mi,
, Mi,  , ∞ are unknown, while all functions Yi,μ( x ) called as bases are known. For treating nonlinearities in f(x ), the chosen basis set should be complete for expanding field f(x ). In Eq. (1) we give a freedom to use different basis sets for expanding different field f(x ). It seems that the expansions of Eq. (4) should include infinite terms for arbitrary functions f(x ). One has to truncate the expansion to finite terms. There is a systematical and self-consistent method, described in the following part to make such truncation. At present, we just assume a truncation at Mi for fi( x ) expansion. Then Eq. (4) can be simplified as
, ∞ are unknown, while all functions Yi,μ( x ) called as bases are known. For treating nonlinearities in f(x ), the chosen basis set should be complete for expanding field f(x ). In Eq. (1) we give a freedom to use different basis sets for expanding different field f(x ). It seems that the expansions of Eq. (4) should include infinite terms for arbitrary functions f(x ). One has to truncate the expansion to finite terms. There is a systematical and self-consistent method, described in the following part to make such truncation. At present, we just assume a truncation at Mi for fi( x ) expansion. Then Eq. (4) can be simplified as

Without noise Γi(t), all the unknown coefficients can be solved by algebraic equations if sufficient data are accumulated16,21. With strong noises the inference computations are much more difficult. Here for network reconstruction we use a method to compute two-time correlations to filter noise effect11,14, together with using high-order correlations of the chosen basis set to reconstruct interactions and nonlinearities of the networks and multiplicative noises.
For arbitrary node i in the network, multiplying Eq. (1) from the right side by a functional vector 

and computing all related correlations, we obtain a linear matrix algebraic equation

with

Z1( x (t)), Z2( x (t)),  , ZN( x (t)) are called correlators. They can be arbitrarily chosen for computing correlation matrix
, ZN( x (t)) are called correlators. They can be arbitrarily chosen for computing correlation matrix  under the condition that their entries must not be linearly dependent on each other so that matrix
under the condition that their entries must not be linearly dependent on each other so that matrix  has full rank, and is invertible. In Eq. (8) we should have 0 ≈ τd ≪ τ ≪ 1 with τ being larger than the correlation time of dynamical noises τd, and much smaller than the characteristic times of deterministic network dynamics, previously assumed to be of order 1. Therefore, noises and correlators must be decorrelated
has full rank, and is invertible. In Eq. (8) we should have 0 ≈ τd ≪ τ ≪ 1 with τ being larger than the correlation time of dynamical noises τd, and much smaller than the characteristic times of deterministic network dynamics, previously assumed to be of order 1. Therefore, noises and correlators must be decorrelated

since the fast-varying noises of Eq. (2) have no correlation with any variable data of earlier times, disregarding any forms of multiplicative noises Qij( x ). Now with the noise-decorrelation of Eq. (9), Eq. (7) can be reduced to

leading to

where Bi(−τ),  and Ai are given in Eqs (8) and (5), respectively. We delete the notion (−τ) in
and Ai are given in Eqs (8) and (5), respectively. We delete the notion (−τ) in  because τ ≪ 1 does not considerably change the values of Ci,μν. All elements of vector Bi(−τ) and matrix
because τ ≪ 1 does not considerably change the values of Ci,μν. All elements of vector Bi(−τ) and matrix  can be computed with known output variables x (t), and thus all the unknown linear and nonlinear coefficients in Eq. (1) can be inferred with a simple and direct linear matrix equation (11), though the noise matrix
can be computed with known output variables x (t), and thus all the unknown linear and nonlinear coefficients in Eq. (1) can be inferred with a simple and direct linear matrix equation (11), though the noise matrix  in Eq. (2) is unknown.
in Eq. (2) is unknown.
Statistical features of noises play crucial roles in the data production. Inferring noise statistics is also important for understanding the nature of data and for predicting the future data production in practical cases. It is desirable that noise matrix  can be also easily reconstructed from the variable data by HOCC algorithm similar to the above
can be also easily reconstructed from the variable data by HOCC algorithm similar to the above


where

where qij,μ( x ) are known bases for expanding Qij( x ); Gij,μν are matrix elements computable from correlations of basis qij,μ and corresponding correlator  ; and Dij,μ are unknown coefficients to be inferred. The detailed derivation of Eqs (13) and (14) is presented in Materials and Methods.
; and Dij,μ are unknown coefficients to be inferred. The detailed derivation of Eqs (13) and (14) is presented in Materials and Methods.
For numerical simulation we can arbitrarily choose correlator vectors and in the following computations we simply take,

where qij,μ( x ), μ = 1, 2,  , Mij play role of vector bases for expanding multiplicative factor Qij( x ), and Mij is the truncation in Qij( x ) expansion like Mi for fi( x ).
, Mij play role of vector bases for expanding multiplicative factor Qij( x ), and Mij is the truncation in Qij( x ) expansion like Mi for fi( x ).
Now four points of the present method should be emphasized. (i) High-order correlations are used to reconstruct nonlinear structure of networks without pursuing any linearization approximation; (ii) Two-time correlations have been proposed to decorrelate noise effects, and the time difference τ can be adjusted to suit different noise conditions; (iii) Basis set Yi, qij and correlator set  can be freely chosen to construct correlation matrices, suitable for different natures of practical networks. (iv) Multiplicative noises are taken into account in the study of network reconstruction problems, and multiplicative factors can be inferred together with the nonlinear fields and interaction structures. Unlike the multiple nonlinear algebraic equations of unknown matrices in ref. 30, where all network nodes fi, i = 1, 2,
can be freely chosen to construct correlation matrices, suitable for different natures of practical networks. (iv) Multiplicative noises are taken into account in the study of network reconstruction problems, and multiplicative factors can be inferred together with the nonlinear fields and interaction structures. Unlike the multiple nonlinear algebraic equations of unknown matrices in ref. 30, where all network nodes fi, i = 1, 2,  , N and matrix elements Qij, i, j = 1, 2,
, N and matrix elements Qij, i, j = 1, 2,  , N are coupled and should be considered as a whole, here for the same noise-driven systems, we have derived two independent linear matrix equations Eqs (11) and (13), separately for each node fi and each noise correlation element Qij( x ). Each of them can be explicitly solved node by node and element by element with available variable data. This advantage can extremely simplify computations when networks are large and noises are coupled and multiplicative.
, N are coupled and should be considered as a whole, here for the same noise-driven systems, we have derived two independent linear matrix equations Eqs (11) and (13), separately for each node fi and each noise correlation element Qij( x ). Each of them can be explicitly solved node by node and element by element with available variable data. This advantage can extremely simplify computations when networks are large and noises are coupled and multiplicative.
Inference of noise-driven networks by using power expansions
We first consider a three-node nonlinear network, the Lorenz system, one of the most famous models in chaos study36,

Though network (16) looks very simple and low-dimensional, it serves as one of the most prevalent prototypes for data analysis. We consider noises

where we adopt absolute values |x|, |y|, |z| in Qii functions for Qii should be positive definite or zero from the definition of Eq. (2). In Eq. (16) both noise and nonlinearity essentially effect and noises with different multiplicative factors can produce considerably different data sets, as shown in Fig. 1 where trajectories for additive noises (Figs (a)(b)) and multiplicative noises (Figs (c)(d)) are presented. Now we apply the general algorithms Eqs (11) to this system. First we should choose bases for field expansion. Without particular information, power series can be naturally chosen as a candidate basis set. Then we assume the following bases with truncation M,

Parameters are taken as σ = 10, ρ = 28, β = 8/3. (a,b) Additive noises Qij = 50δij are applied. (c,d) Multiplicative noises a1 = 20, a2 = 50, b1 = 25, b2 = 60, c1 = 15, c2 = 30 in Eq. (17) are applied. Data are chaotic and strongly random. The trajectory in (d), from which one cannot see any trace of Lorentz dynamics, is considerably different from that of (b) for different noise factors, though Lorentz dynamic field is not changed in all (a–d).

Here we introduce an idea of self-consistent checking of the truncation. At first we take  bases in Eq. (18), compute all elements of corresponding
bases in Eq. (18), compute all elements of corresponding  , Bi and obtain
, Bi and obtain  . Then we further consider some more bases, i.e.,
. Then we further consider some more bases, i.e.,  bases in Eq. (18), and obtain results of
bases in Eq. (18), and obtain results of  .
.  is concluded as a suitable truncation if the results satisfy two conditions. Condition (i):
is concluded as a suitable truncation if the results satisfy two conditions. Condition (i):  for all coefficients obtained with
for all coefficients obtained with  truncation; Condition (ii):
truncation; Condition (ii):  for all coefficients of bases not included by
for all coefficients of bases not included by  truncation. If any of the above two conditions is not satisfied we should go on to include more bases in (18),
truncation. If any of the above two conditions is not satisfied we should go on to include more bases in (18),  ,
,  and so on, till the two conditions are satisfied at
and so on, till the two conditions are satisfied at  truncation. We then conclude
truncation. We then conclude  is the suitable truncation. Now we use the above method of truncations, successively from low orders to high orders of Eq. (18).
is the suitable truncation. Now we use the above method of truncations, successively from low orders to high orders of Eq. (18).
A self-consistent justification on correct truncation for Eq. (16) is illuminated in Fig. 2. In Fig. 2(a), it is apparent that Mi = 4 (bases: 1, x, y, z) is not a proper truncation, since the reconstruction of Mi = 4 is considerably different from that of Mi = 10, where all bases of powers of the second order are taken into account. In Fig. 2(b) we compare the reconstruction results truncated by the second order (Mi = 10) with those of the third order (M = 20), and the above self-consistent checking conditions (i) and (ii) are both fulfilled. Therefore we can conclude it is enough to truncate the expansion at Mi = 10 with properly chosen bases in Eq. (18). In Fig. 1(c) we compare the reconstructed results for Mi = 10 with the actual Ai,μ, and the nonlinear and interactive structures of Eq. (16) are satisfactorily recovered indeed.

Red circles are for additive noises while blue squares for multiplicative ones. (a) Reconstruction results obtained by Eq. (11) with the truncated bases of the zero and the first orders of powers (Mi = 4) plotted against those with power bases truncated up to the second order Mi = 10. (b) The same as (a) with power bases truncated at the third order (Mi = 17) plotted against those truncated at the second order (Mi = 10). The truncation at Mi = 10 is self-consistently confirmed to be suitable. (c) Inference results obtained by Eq. (11) with Mi = 10 plotted against the actual coefficients. All plots are around the diagonal line, indicating correct reconstruction at Mi = 10. (d) Dii,μ computed by Eq. (13) plotted against actual ones. Both sets coincide each other approximately.
In principle, the derivations from Eq. (4) to Eq. (11) and the computations of Fig. 2 can be conducted generally without knowing any trace of the network dynamics. The trials of truncations can be performed order by order from lower powers to high powers until successful self-consistent checking. However, the number of tested bases K increases very quickly by increasing the truncation order. For large networks N ≫ 1 we usually have K ≫ N ≫ 1, if we do not have any idea about the field f(x ) and the truncation has to be performed at large expansion order. For a given sample number L the reconstruction errors increases quickly as L/K decreases. Therefore, effectively reducing the number of tested bases K can make reconstruction less time consuming and more precise. There exist some methods to treat this problem. For instance, the compressive sensing method can exclude many zero coefficients from the inference computations and effectively reduce parameter number K37,38. This will not be discussed in the present paper.
For inferring noise statistics we construct expansion in the similar ways with bases Eq. (15)

By applying Eqs (13) and (14) the coefficients of multiplicative factors of noises Dij,k can be computed. The results are shown in Fig. 2(d). It is remarkable that with the randomly behaved data of Fig. 1 only we can correctly explore not only the nonlinear fields and interaction structures, but also the detailed multiplicative behaviors of noises.
We can also use the inference results to reconstruct the Lorentz network, simulate the predicted deterministic equations ( f only, without noise) and compare the trajectories with the original one with noise lifted (Fig. 3(a–d)). It is found that both reconstructed patterns match the original one well, though the two measured trajectories of Fig. 1(a–d) differ from each other considerably due to different multiplicative factors of noises. This coincidence justifies well the effectiveness of HOCC method. In Fig. 3(e,f) we produce variable data by simulating the reconstructed networks with derived noises with the inferred multiplicative factors. The features of the noisy data are reconstructed perfectly as well for both additive and multiplicative noises.

(a–c) Comparison of the reproduced trajectories of the system reconstructed by our HOCC method ((a,b) for additive and multiplicative noises, respectively) with that of the original Lorentz system (c). Agreement is striking since only the strongly noisy data of Fig. 1 are used for dynamics reconstruction, and the data in Fig. 1(a,b) are so different from those in Fig. 1(c,d). (d) x(t) time sequences of (a–c) from the same position of x = 1, y = 0.1, z = 1. Blue, green and red lines correspond to time sequences of x variables in (a–c), respectively. The three trajectories run together for certain time interval, justifying the correct dynamics reconstruction for both additive and multiplicative noises. They diverge from each other, however, as time goes on due to the chaoticity of the dynamics. (e,f) Reproduced trajectories by noise-driven models inferred by HOCC with corresponding additive (e) and multiplicative (f) noises. The different characteristics of data in Fig. 1(b,d) are reproduced convincingly in (e,f) respectively.
Next we infer a network with much higher dimension and more complicated nonlinearities

Equation (19) is very common in practical systems where local dynamic of each node is strongly nonlinear, and dynamic structures are diverse for different nodes. On the other hand interactions between nodes, the external facts for each node, are approximately linear. Expanding Φi(xi) by power series to a power 

and referring to Eqs (1) and (4), we have

Then we can represent both unknown nonlinear structure and linear interaction topology unified as

and define basis vector as

Choosing correlator vector Zi as Zi = Yi, we can specify vector Bi(−τ) and matrix  as
as

Inserting Eq. (23) into Eq. (11) we can solve all the unknown elements, including all the nonlinear and linear terms.
In Fig. 4 we investigate a particular case with local dynamics

Parameters are taken with uniform distributions in the intervals ai ∈ (−1, 1), bi ∈ (2, 5) and ci ∈ (0, 2) and additive noises Qij ∈ δij(0.5, 1). The interaction intensities are Wij (i, j = 1, 2,  , N, i ≠ j) ∈ (0.5, 1) with 10% probability for positive ones; ∈(−1, −0.5) also with 10% for negative ones; and Wij = 0 otherwise. Power bases are organized from low-order to higher-order ones as described in Eq. (22). (a) Results of HOCC for mi = 2 plotted vs. those for mi = 1. Triangles are considerably away from the diagonal line, representing incorrect truncation at mi = 1. (b) The same as (a) with results of mi = 3 plotted with those of mi = 2. The truncation at mi = 2 is not suitable either. (c) Results for mi = 4 plotted vs. those for mi = 3. Both results coincide with each other fairly well, that self-consistently confirms the correctness of the HOCC method for sufficiently large mi, mi ≥ 3. (d) The results of HOCC for mi = 3 plotted vs. the actual values of Aiμ. With suitable nonlinearity considered, all nonlinear and interacting structures are inferred correctly with certain fluctuations.
, N, i ≠ j) ∈ (0.5, 1) with 10% probability for positive ones; ∈(−1, −0.5) also with 10% for negative ones; and Wij = 0 otherwise. Power bases are organized from low-order to higher-order ones as described in Eq. (22). (a) Results of HOCC for mi = 2 plotted vs. those for mi = 1. Triangles are considerably away from the diagonal line, representing incorrect truncation at mi = 1. (b) The same as (a) with results of mi = 3 plotted with those of mi = 2. The truncation at mi = 2 is not suitable either. (c) Results for mi = 4 plotted vs. those for mi = 3. Both results coincide with each other fairly well, that self-consistently confirms the correctness of the HOCC method for sufficiently large mi, mi ≥ 3. (d) The results of HOCC for mi = 3 plotted vs. the actual values of Aiμ. With suitable nonlinearity considered, all nonlinear and interacting structures are inferred correctly with certain fluctuations.

with ai, bi, ci uniformly distributed as ai ∈ (−1, 1), bi ∈ (2, 5), ci ∈ (0, 2). The network has mutual interactions (i ≠ j) positive Wij ∈ (0.5, 1), i, j = 1, 2,  , N, with 10% probability, negative ones ∈ (−1, −0.5) also with 10%, and Wij = 0 otherwise. Simple additive white noises are used for this model:
, N, with 10% probability, negative ones ∈ (−1, −0.5) also with 10%, and Wij = 0 otherwise. Simple additive white noises are used for this model:

with uniform probability distribution. We consider different truncations mi’s. It is obvious that the reconstruction has large errors for too small mi in Fig. 4(a,b) and they can be quickly improved by increasing mi, and saturate at sufficiently large mi (Fig. 4(c,d), mi = 3 is a fairly good approximation in our case). Unlike Eq. (16) where the power expansion of field f contains only powers lower than the third order and the truncation up to the second order is exact, the expansion of Eq. (24) has nonzero coefficients for infinitely large mi’s. And therefore, the satisfactory reconstruction results of Fig. 4(d) convincingly confirm that the approach of self-consistent truncation works stably also for nonzero while convergent expansions.
Nonlinear network reconstruction by using different basis vectors
For inferring linear networks, the basis vectors can be simply chosen as output variables Y = (x1, x2,  , xN). For nonlinear networks, the ways to choose basis vectors become diverse. In Eqs (18) and (22) power expansions are used for representing nonlinear functions. Different types of basis vectors can be used, depending on the nature of data and property of nonlinear dynamics. In many practical cases the inverse computations of networks can be much more simplified by selecting suitable basis vectors. Let us consider a network of coupled Kuramoto model25,26,28,29,39 that has been extensively studied for describing oscillatory complex systems.
, xN). For nonlinear networks, the ways to choose basis vectors become diverse. In Eqs (18) and (22) power expansions are used for representing nonlinear functions. Different types of basis vectors can be used, depending on the nature of data and property of nonlinear dynamics. In many practical cases the inverse computations of networks can be much more simplified by selecting suitable basis vectors. Let us consider a network of coupled Kuramoto model25,26,28,29,39 that has been extensively studied for describing oscillatory complex systems.

where θi, i = 1, 2,  , N, represent phase angles of oscillators, and all Φi(θi), Ψij(ϕ) are unknown nonlinear functions with topology
, N, represent phase angles of oscillators, and all Φi(θi), Ψij(ϕ) are unknown nonlinear functions with topology

It is not convenient to approximate functions Eq. (27) by power expansions while we can conveniently do it by using Fourier basis vectors. Expanding Φi, Ψij as

we can then define basis vector as

and the corresponding unknown coefficient vector as

The correlator vector Zi can be simply defined as

Inserting Eq. (29) for Y (t) and Eq. (31) for Z (t − τ) (0 < τ ≪ 1) into Eq. (11), we can specify all elements of vector Bi(−τ) and matrix  , and explicitly infer all the nonlinear structures and interaction links of targeted vector Ai in Eq. (30).
, and explicitly infer all the nonlinear structures and interaction links of targeted vector Ai in Eq. (30).
We take a network of N = 10 as an example with

where all αi,k,  , βij,k,
, βij,k,  , k = 1, 2, 3, uniformly distribute in the interval (−1, 1). Multiplicative noises Γi(t) are simply chosen as
, k = 1, 2, 3, uniformly distribute in the interval (−1, 1). Multiplicative noises Γi(t) are simply chosen as

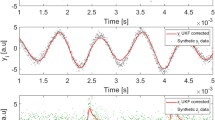
with aij and bij,k randomly and uniformly distributed in (0,1). In Fig. 5(a–c) the reconstruction results for different mi are compared. According to the self-consistently checking condition, we conclude that mi = 1, 2 are not suitable (see Fig. 5(a,b)) while the truncation at mi = 3 is enough for correct network reconstruction (see the distribution of dots around the diagonal line in Fig. 5(c)). In Fig. 5(d) the inference results of mi = 3 are compared with actual values of Aij. With all harmonic terms being taken into account, we achieve rather precise reconstruction with certain fluctuations. Moreover, by applying approaches of Eqs (13)(14) we can explore the statistical structures of noise and reveal multiplicative factors rather accurately (Fig. 5(e)).

N = 10, and other parameters are uniformly distributed on Ai,μ ∈ (−1, 1) (for all nonzero coefficients in Equation(32), μ ≥ 2 and mi ≤ 3), Ai,1 ∈ (1, 2) and all the Fourier components of mi ≥ 4 are zero. Multiplicative noises Eq. (33) are used with aij, bij,k ∈ (0, 1). Truncations are made from low-order harmonics to higher-order ones. (a,b) The same as Fig. 2(a) with phase dynamics Eq. (26) considered, and the results of mi = 2 plotted vs. those of mi = 1 in (a); mi = 3 vs. mi = 2 in (b). Without high-order harmonics, many dots distribute away from the diagonal lines. (c) The results of mi = 4 plotted vs. those of mi = 3. All dots are distributed around the diagonal line, indicating self-consistently the suitable truncation at mi = 3. (d) The same as Fig. 2(c) with Eq. (26) computed. All computed results at mi = 3 coincide with those of the actual Ai,μ with certain fluctuations. (e) The same as Fig. 2(d) with noises (33) computed. The results of multiplicative noises  agree rather well with actual noise parameters Dii,μ’s.
agree rather well with actual noise parameters Dii,μ’s.
In the above analysis we consider only dynamical and white noises, i.e., Γ(t) in Eq. (1), by assuming that all the node variables x (t) can be measured accurately. The analysis can be extended to measurement noises and colored noises, as we show in Supplementary Information. Moreover, due to noises and finite data length reconstruction errors are inevitable. Some facts influencing errors of inference are also briefly discussed in Supplementary Information. All discussion in this paper focused on reconstructions of homogeneous random networks. The HOCC method can be applied equally well to networks of different structures, including small-world and scale-free networks.
Conclusions
In conclusion we have studied the problem of inferring noise-driven nonlinear dynamic networks with measurable data of node variables only. A high-order correlation computation (HOCC) method is proposed to unifiedly treat nonlinear dynamic structures, coupling topologies and statistics of additive and multiplicative noises in networks. This method treats network reconstruction by jointly considering three facts: choosing suitable basis and correlator vectors to expand nonlinear terms of networks; adjusting correlation time difference to decorrelate noise effects; and applying high-order correlations to derive linear matrix equations to infer nonlinear structures, topologies and noise correlation matrices. The HOCC algorithm has been theoretically derived, and its predictions are well confirmed by numerical results.
In biological, social and other crossing fields, we have huge amount of data available for analysis while often understand much less about the structures and dynamics producing these data. Nonlinear dynamics, mutual node interactions and noises often cooperate to yield various functions. Now with the development of the network reconstruction research, it is hopefully expected that we can explore hidden mechanisms, find underlying principles and reveal various unknown key parameters of practical dynamic networks by analyzing measurable output data only. These capabilities create a novel and significant perspective for understanding, modulating and controlling realistic network processes.
Materials and Methods
Derivation of Eqs (13) and (14)
Equations (13) and (14) can be derived as follows:

Its expectation on noise realizations reads

Since 〈Γi(t)〉 = 〈Γj(t)〉 = 0 and τ ≪ 1 we have

Considering the expansion of Qij( x ) on qij( x ) bases

multiplying the two sides of Eq. (36) by basis  and making time average, we arrive at
and making time average, we arrive at

with Δ Bij being vector having elements

and  being matrix with elements
being matrix with elements

Finally we obtain

where all elements of vector Δ Bij and matrix  can be computed from available data and well defined bases qij,μ,
can be computed from available data and well defined bases qij,μ,  and vector Dij can thus be inferred by Eq. (41).
and vector Dij can thus be inferred by Eq. (41).
Additional Information
How to cite this article: Yang, C. et al. Reconstruction of noise-driven nonlinear networks from node outputs by using high-order correlations. Sci. Rep. 7, 44639; doi: 10.1038/srep44639 (2017).
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
References
Albert, R. & Barabási, A. L. Statistical mechanics of complex networks. Reviews of Modern Physics 74, 47 (2002).
Newman, M. E. The structure and function of complex networks. SIAM review 45, 167–256 (2003).
Schneidman, E., Berry, M. J., Segev, R. & Bialek, W. Weak pairwise correlations imply strongly correlated network states in a neural population. Nature 440, 1007–1012 (2006).
Butte, A. J., Tamayo, P., Slonim, D., Golub, T. R. & Kohane, I. S. Discovering functional relationships between RNA expression and chemotherapeutic susceptibility using relevance networks. Proceedings of the National Academy of Sciences 97, 12182–12186 (2000).
Barabasi, A. L. & Oltvai, Z. N. Network biology: understanding the cell’s functional organization. Nature reviews genetics 5, 101–113 (2004).
Gale, D. M. & Kariv, S. Financial networks. The American economic review 97, 99–103 (2007).
Eagle, N., Pentland, A. S. & Lazer, D. Inferring friendship network structure by using mobile phone data. Proceedings of the national academy of sciences 106, 15274–15278 (2009).
Wang, W. X., Lai, Y. C. & Grebogi, C. Data based identification and prediction of nonlinear and complex dynamical systems. Physics Reports 644, 1–76 (2016).
Wang, W. X., Chen, Q., Huang, L., Lai, Y. C. & Harrison, M. A. F. Scaling of noisy fluctuations in complex networks and applications to network prediction. Physical Review E 80, 016116 (2009).
Ren, J., Wang, W. X., Li, B. & Lai, Y. C. Noise bridges dynamical correlation and topology in coupled oscillator networks. Physical Review Letters 104, 058701 (2010).
Zhang, Z. et al. Solving the inverse problem of noise-driven dynamic networks. Physical Review E 91, 012814 (2015).
Ching, E. S., Lai, P. Y. & Leung, C. Y. Reconstructing weighted networks from dynamics. Physical Review E 91, 030801 (2015).
Chen, Y., Wang, S., Zheng, Z., Zhang, Z. & Hu, G. Depicting network structures from variable data produced by unknown colored-noise driven dynamics. Europhysics Letters 113, 18005 (2016).
Ching, E. S. & Tam, H. C. Reconstructing Links in Directed Networks from Noisy Dynamics. arXiv 1604.02224 (2016).
Timme, M. & Casadiego, J. Revealing networks from dynamics: an introduction. Journal of Physics A: Mathematical and Theoretical 47, 343001 (2014).
Wang, W. X., Yang, R., Lai, Y. C., Kovanis, V. & Grebogi, C. Predicting catastrophes in nonlinear dynamical systems by compressive sensing. Physical Review Letters 106, 154101 (2011).
Yu, D., Righero, M. & Kocarev, L. Estimating topology of networks. Physical Review Letters 97, 188701 (2006).
Levnajić, Z. Derivative-variable correlation reveals the structure of dynamical networks. The European Physical Journal B 86, 1–7 (2013).
Levnajić, Z. & Pikovsky, A. Untangling complex dynamical systems via derivative-variable correlations. Scientific reports 4, 05030, doi: 10.1038/srep05030 (2014).
Levnajić, Z. & Pikovsky, A. Network reconstruction from random phase resetting. Physical Review Letters 107, 034101 (2011).
Shandilya, S. G. & Timme, M. Inferring network topology from complex dynamics. New Journal of Physics 13, 013004 (2011).
Ipsen, M. & Mikhailov, A. S. Evolutionary reconstruction of networks. Physical Review E 66, 046109 (2002).
Su, R. Q., Wang, W. X. & Lai, Y. C. Detecting hidden nodes in complex networks from time series. Physical Review E 85, 065201 (2012).
Daniels, B. C. & Nemenman, I. Automated adaptive inference of phenomenological dynamical models. Nature communications 6, 8133, doi: 10.1038/ncomms9133 (2015).
Blaha, K. A. et al. Reconstruction of two-dimensional phase dynamics from experiments on coupled oscillators. Physical Review E 84, 046201 (2011).
Kralemann, B. et al. In vivo cardiac phase response curve elucidates human respiratory heart rate variability. Nature communications 4, 2418, doi: 10.1038/ncomms3418 (2013).
Wu, X., Wang, W. & Zheng, W. X. Inferring topologies of complex networks with hidden variables. Physical Review E 86, 046106 (2012).
Stankovski, T., Duggento, A., McClintock, P. V. & Stefanovska, A. Inference of time-evolving coupled dynamical systems in the presence of noise. Physical Review Letters 109, 024101 (2012).
Smelyanskiy, V., Luchinsky, D., Stefanovska, A. & McClintock, P. Inference of a nonlinear stochastic model of the cardiorespiratory interaction. Physical review letters 94, 098101 (2005).
Smelyanskiy, V., Luchinsky, D. G., Timucin, D. & Bandrivskyy, A. Reconstruction of stochastic nonlinear dynamical models from trajectory measurements. Physical Review E 72, 026202 (2005).
Hasty, J., Pradines, J., Dolnik, M. & Collins, J. J. Noise-based switches and amplifiers for gene expression. Proceedings of the National Academy of Sciences 97, 2075–2080 (2000).
García-Ojalvo, J., Hernández-Machado, A. & Sancho, J. M. Effects of external noise on the Swift-Hohenberg equation. Physical review letters 71, 1542 (1993).
Fox, R. F. & Roy, R. Steady-state analysis of strongly colored multiplicative noise in a dye laser. Physical Review A 35, 1838 (1987).
Entekhabi, D., Rodriguez-Iturbe, I. & Bras, R. L. Variability in large-scale water balance with land surface-atmosphere interaction. Journal of Climate 5, 798–813 (1992).
Montgomery, D. C., Peck, E. A. & Vining, G. G. Introduction to Linear Regression Analysis (John Wiley & Sons, 2015).
Lorenz, E. N. Deterministic nonperiodic flow. Journal of the atmospheric sciences 20, 130–141 (1963).
Candés, E. J., Romberg, J. & Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Transactions on information theory 52, 489–509 (2006).
Candés, E. J., Romberg, J. K. & Tao, T. Stable signal recovery from incomplete and inaccurate measurements. Communications on pure and applied mathematics 59, 1207–1223 (2006).
Kuramoto, Y. Chemical Oscillations, Waves, and Turbulence (Springer, Berlin, 1984).
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant No. 11135001) and China Postdoctoral Science Foundation (Grant No. 2015M581905).
Author information
Authors and Affiliations
Contributions
C.Y. and H.G. conceived the study. C.Y., W.S. and H.G. designed the research project. C.Y., Z.Z., W.S. and H.G. conducted the theoretical analysis, and C.Y., Z.Z. and C.T. conducted the numeral simulation and verification. H.G. wrote the initial draft of the paper. All authors interpreted the results and revised the paper.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Chen, Y., Zhang, Z., Chen, T. et al. Reconstruction of noise-driven nonlinear networks from node outputs by using high-order correlations. Sci Rep 7, 44639 (2017). https://doi.org/10.1038/srep44639
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep44639
This article is cited by
-
Reconstruction of nonlinear flows from noisy time series
Nonlinear Dynamics (2022)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
