
Abstract
A challenging problem in network science is to control complex networks. In existing frameworks of structural or exact controllability, the ability to steer a complex network toward any desired state is measured by the minimum number of required driver nodes. However, if we implement actual control by imposing input signals on the minimum set of driver nodes, an unexpected phenomenon arises: due to computational or experimental error there is a great probability that convergence to the final state cannot be achieved. In fact, the associated control cost can become unbearably large, effectively preventing actual control from being realized physically. The difficulty is particularly severe when the network is deemed controllable with a small number of drivers. Here we develop a physical controllability framework based on the probability of achieving actual control. Using a recently identified fundamental chain structure underlying the control energy, we offer strategies to turn physically uncontrollable networks into physically controllable ones by imposing slightly augmented set of input signals on properly chosen nodes. Our findings indicate that, although full control can be theoretically guaranteed by the prevailing structural controllability theory, it is necessary to balance the number of driver nodes and control cost to achieve physical control.
Similar content being viewed by others


Introduction
The past few years have witnessed great progress toward understanding the linear controllability of complex networks1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28. Given a linear and time-invariant dynamical system, the traditional approach to assessing its controllability is through the Kalman rank condition29. However, for a complex network, it is difficult to test, both mathematically and computationally, the Kalman rank condition directly to determine the optimal configuration for control input signals1 due to the typically large network size and the complex spectrum of network topology. To overcome this difficulty, Liu et al. proposed in their pioneering work4 to exploit Lin’s classic theory of structural controllability30. In this framework, the fundamental issue is to determine the minimum number of controllers required to steer the whole networked system from an arbitrarily initial state to an arbitrarily final state in finite time. It was proved and demonstrated4 that, for directed complex networks, their structural controllability can be established via the maximum matching algorithm31,32,33. In particular, based on Lin’s theory, one can determine the maximally matched set of nodes, where each and every unmatched node requires an external control signal. An equivalent optimization procedure was developed for undirected networks to determine the minimum dominating set of nodes6. The structural controllability framework also served the base to address an array of issues such as edge dynamics8, lower and upper bounds of energy required for control7, control centrality34, optimization5, effects of the density of in/out degree nodes14, and scaling of energy cost27. In addition, based on the classic Popov-Belevitch-Hautus (PBH) rank condition35 from traditional control engineering, a variant of the structural-controllability theory, an exact controllability framework was developed10 which is universally applicable to all kinds of complex networks: directed or undirected, weighted or unweighted. In terms of applications, the structural controllability framework has been used to characterize protein interaction networks to determine the key proteins responsible for certain biological functions16.
In both structural and exact controllability frameworks, the focus is to determine the minimum number of control signals, denoted by ND, for complex networks of various topologies. However, we have encountered an unexpected difficulty when using the minimal set given by either structural or exact controllability theory to carry out actual control of the network: convergence to the final state. In particular, given a network, once ND is determined, we can determine the specific control signals to be applied at various unmatched nodes by using the standard linear systems theory36. The surprising phenomenon is that, quite often, actual control of the system cannot be achieved computationally in the sense that, in any finite time, the system cannot be driven from an arbitrarily initial state to an arbitrarily final state. We believe that this difficulty is fundamental, as we were not able to remove or even mitigate the problem of divergence despite extensive and systematic computational efforts in implementing various ways to optimize the numerical algorithm. This difficulty in realizing actual control persists for a large number of model and real world networks. While somewhat unsettling, the issue prompts us to hypothesize that the existing controllability frameworks are merely mathematical, as the implementation of actual control would often require infinite precision computations and, more seriously, an infinite amount of energy. To make the notion of controllability of complex networks meaningful, the issue of physical controllability must be addressed.
In this paper, we develop a physical controllability framework for complex networks to address whether actual control can be achieved in an experimentally or computationally feasible way. Given a complex network, we first use the structural controllability theory4 to determine ND and a set of unmatched nodes to which control signals are to be applied. Then, with a given pair of arbitrarily initial and final states as well as a finite control time, we calculate the optimal control signals36 and evolve the whole networked system, which is essentially a linear dynamical system under external driving, to determine whether the system can be driven from the initial state to the final state in the given amount of time. During this process, the energy required for control can be calculated through the standard formula in linear systems theory36,37, which expresses the energy as the integral of the product of a number of matrices, including the inverse of the positive-definite, symmetric Gramian matrix. Freedom in choosing the initial and final states and independent network realizations render feasible a statistical analysis of the control process. We find that, typically, there are two cases, depending on whether the network can be physically controlled. For the physically controllable case, the whole system, starting from the chosen initial condition, can actually converge to the final state in the prespecified time within a predefined precision. In this case, the Gramian matrix is well-behaved, meaning that both its condition number and the energy are not unrealistically large. For the physically uncontrollable case, the system cannot reach the final state within the predefined precision in the given time. In such a case, the Gramian matrix is singular in the sense that its condition number can be arbitrarily large, so is the corresponding energy. Increasing the precision of the computation, e.g., by using special simulation packages with round-off error orders of magnitude smaller than that associated with the conventional double-precision computation, would convert a few uncontrollable cases into controllable ones, but vast majority of the uncontrollable cases remain unchanged.
The main result of this paper is a proposal of a general, probabilistic measure to characterize the physical controllability for complex networks of arbitrary topology. For physically uncontrollable networks, it is important to develop effective strategies to make them physically controllable. To accomplish this goal, we gain insights by calculating the control energy for a bidirectional 1D chain and obtaining an analytical relation between energy E and chain length L. We then apply the result to general networked systems based on the idea of longest control chain (LCC)27. Optimization strategies can be derived to decrease the control energy drastically. In fact, if the system is physically uncontrollable, a viable way to make it controllable is to increase the number of control signals beyond ND. Our framework of physical controllability thus contains the following essential ingredients: (1) ND, the minimum number of control signals determined by the existing mathematical controllability frameworks, (2) a measure of physical controllability, (3) control energy E determined by the Gramian matrix, and (4) augmentation of ND for physically uncontrollable networks. The existing mathematical controllability theories4,10 thus provide a base for our physical controllability framework. The quantity ND, on which the mathematical controllability theories focus, can effectively be regarded as the lower bound of the actual number of control signals required. To realize physical control, depending on the specific system and control settings, either ND control signals suffice or substantially more signals are needed.
Results
Definition of physical controllability
We consider the standard setting of a linear dynamical system subject to control input1,4,10:

where x = [x1(t), …, xN(t)]T is a vector of dynamical variables of the entire network, u = [u1(t), …, uM(t)]T is a vector defining the set of control input signals, A = {aij}N×N is the adjacency matrix with N being the number of nodes in the network, and  is control input matrix specifying the set of ND “driver” nodes4, each receiving a control signal that corresponds to one component of the control vector u. From the linear systems theory, optimal control of a linear dynamical network in the sense of minimized energy cost can be achieved when the input control signals ut are chosen as36,37:
is control input matrix specifying the set of ND “driver” nodes4, each receiving a control signal that corresponds to one component of the control vector u. From the linear systems theory, optimal control of a linear dynamical network in the sense of minimized energy cost can be achieved when the input control signals ut are chosen as36,37:  , where
, where

is the Gramian matrix, a positive-definite and symmetric matrix36, which serves as the base to determine quantitatively if a system is actually controllable. In particular, the system is controllable only when W is nonsingular (invertible) for given control precision36,37. With the control input signal u, the energy cost is36

where control is initiated at t = 0 and ended at t = tf.
To present concrete evidence for the existence of physically uncontrollable networks, we use the Erdos-Renyi (ER) type of directed random networks38 and the Barabási-Albert (BA) type of directed scale-free networks39 with a single parameter Pb. The meaning of Pb is the following. Given a pair of linked nodes, i and j, the probability that the link points from the smaller-degree node to the larger-degree one is Pb, and the probability in the opposite direction is 1 − Pb. The link direction is chosen randomly if i and j have the same degree. To determine the set of driver nodes, we use the maximum-matching algorithm30, which gives the control matrix B. For each combination of A and B, we first randomly choose the initial and final states. We then calculate the corresponding Gramian matrix W, its condition number, the input signal ut, the actual final states  , and finally the control energy E(tf). Repeating this process for each and every independent network realization in the ensemble enables an extensive statistical analysis of the control process.
, and finally the control energy E(tf). Repeating this process for each and every independent network realization in the ensemble enables an extensive statistical analysis of the control process.
Mathematically, if the Gramian matrix W is singular, the energy diverges. Through extensive and systematic numerical computations, we find that, even when W is non-singular in the mathematical sense, for typical complex networks its condition number can be enormously large, making it effectively singular as any physical measurement or actual computation must be associated with a finite precision. Say in an experiment the precision of measurement is ε. In a computational implementation of control, ε is effectively the computer round-off error. Consider the solution vector X of the linear equation: W · X = Y, where Y is a known vector. Let CW be the condition number of W. The accuracy of the numerical solution of X, denoted by eX = 10−k (k is a positive integer), is bounded by the product between CW and ε40. We see that, if CW is larger than  , it is not possible to bring the system to within 10−k of the final state at finite control cost, so physically control cannot be achieved in finite time.
, it is not possible to bring the system to within 10−k of the final state at finite control cost, so physically control cannot be achieved in finite time.
For a large number of networks drawn from an ensemble of networks with a pre-defined topology, the condition numbers of their Gramian matrices are often orders of magnitude larger than  . Figure 1 shows the correlation between the condition number CW and the control error eX. We observe that, within a certain range of CW, an approximate scaling relation exists between CW and eX, as shown in panels (a, c, e, g). However, the scaling disappears outside the range where the Gramian matrix W is ill conditioned, leading to considerable errors when computing the matrix inverse. In principle, the scaling regime can be extended with improved computational precision, but not indefinitely. For the networks with an ill conditioned Gramian matrix, not only is the control vector unable to drive the system to the target state, but the associated energy can be extremely large. These observations suggest the following criterion to define physical controllability in terms of the control energy cost: a network is controllable with respect to a specific control setting if and only if the condition number of its Gramian matrix is less than
. Figure 1 shows the correlation between the condition number CW and the control error eX. We observe that, within a certain range of CW, an approximate scaling relation exists between CW and eX, as shown in panels (a, c, e, g). However, the scaling disappears outside the range where the Gramian matrix W is ill conditioned, leading to considerable errors when computing the matrix inverse. In principle, the scaling regime can be extended with improved computational precision, but not indefinitely. For the networks with an ill conditioned Gramian matrix, not only is the control vector unable to drive the system to the target state, but the associated energy can be extremely large. These observations suggest the following criterion to define physical controllability in terms of the control energy cost: a network is controllable with respect to a specific control setting if and only if the condition number of its Gramian matrix is less than  , a critical number determined by both the measurement or computational error and the required precision of control. For a given set of network parameters (hence a given network ensemble) and control setting, the probability that the condition number of the Gramian matrix is less than
, a critical number determined by both the measurement or computational error and the required precision of control. For a given set of network parameters (hence a given network ensemble) and control setting, the probability that the condition number of the Gramian matrix is less than  ,
,  , can effectively serve as a quantitative measure of physical controllability. Increasing the precision of the computation, e.g., by using special simulation packages with round-off error orders of magnitude smaller than that associated with the conventional double-precision computation, would convert a few uncontrollable cases into controllable ones, but vast majority of the uncontrollable cases remain unchanged.
, can effectively serve as a quantitative measure of physical controllability. Increasing the precision of the computation, e.g., by using special simulation packages with round-off error orders of magnitude smaller than that associated with the conventional double-precision computation, would convert a few uncontrollable cases into controllable ones, but vast majority of the uncontrollable cases remain unchanged.

Network size is N = 100 for (a–d) and 200 for (e–h), average degree is 〈k〉 = 6 for ER random networks [(a), (b), (e) and (f)] and 8 for BA scale-free networks [(c), (d), (g) and (h)]. Directional link probability between any pair of nodes is Pb = 0.1. Panels (a), (c), (e) and (g) show the scaling relation between the condition number CW and the control precision eX. Panels (b), (d), (f) and (h) show the fraction RCW of the networks with a certain CW number. The scaling relation holds within some CW-eX region with boundaries specified as the black dashed lines. The eX values are not physically meaningful outside the boundaries that are defined according to the precision limit of computation. The thresholds of CW and eX used in the computations are 1012 and 10−4, respectively, which are indicated as the blue dashed lines. The threshold values are chosen to lie within the physical boundaries so that the calculations for all CW values are meaningful.
Note that, physical controllability is characterized by the condition number of the Gramian matrix W, which is defined by the adjacency matrix A, the control matrix B, and the control time from t0 to tf. The adjacency matrix A totally defines the structure of the underlying network and, in the absence of control, solely determines the evolution of the system from an initial state. The purpose of control is to design the control matrix B so that the Gramian matrix is numerically to ensure that the system is physically controllable, which can be accomplished regardless of whether the matrix A is stable or unstable.
We also note that, in a linear dynamical system, the Gramian matrix W is determined by the network structure, the control configuration, and the control time; it does not depend on the dynamical trajectory. As a result, additive noise of reasonable amplitude does not affect the physical controllability of the network.
Structural controllability does not imply physical controllability
We present evidence that structural and physical controllabilities are not necessarily compatible with each other. Figure 2(a,b) show the percentage of driver nodes, nD ≡ ND/N, versus the directional link probability Pb. We see that nD is minimized for Pb = 0.5, indicating a maximal (optimal) level of structural controllability because only a few control signals are needed to control the whole network4. But can physical controllability be achieved in the same parameter regime where structural controllability is optimized? Figure 2(c,d) show the corresponding physical controllability  versus the network parameter Pb. We see that, in both regimes of small and large Pb values where structural controllability is weak [corresponding to relatively high values of nD in Fig. 2(a,b)], the physical controllability is relatively strong. In the regime of small Pb values, most directed links in the network point from small to large degree nodes. In this case, the network is more physically controllable, in agreement with intuition. The striking result is that, in the regime of intermediate Pb values (e.g., Pb around 0.5) where the number of driver nodes to control the whole network is minimized so that structural controllability is regarded the strongest, the physical controllability is in fact the weakest, as the probability of the condition number
versus the network parameter Pb. We see that, in both regimes of small and large Pb values where structural controllability is weak [corresponding to relatively high values of nD in Fig. 2(a,b)], the physical controllability is relatively strong. In the regime of small Pb values, most directed links in the network point from small to large degree nodes. In this case, the network is more physically controllable, in agreement with intuition. The striking result is that, in the regime of intermediate Pb values (e.g., Pb around 0.5) where the number of driver nodes to control the whole network is minimized so that structural controllability is regarded the strongest, the physical controllability is in fact the weakest, as the probability of the condition number  being small is close to zero. For example, for the random networks in Fig. 2(c), for 〈k〉 = 4, the minimum value of
being small is close to zero. For example, for the random networks in Fig. 2(c), for 〈k〉 = 4, the minimum value of  is only about 0.1 for Pb ≈ 0.6, while for 〈k〉 = 6 and 〈k〉 = 8, the minimum values are essentially zero. Surprisingly, near zero values of
is only about 0.1 for Pb ≈ 0.6, while for 〈k〉 = 6 and 〈k〉 = 8, the minimum values are essentially zero. Surprisingly, near zero values of  occur in a wide range of the parameter Pb, e.g., [0.3, 0.8] and [0.2, 0.9] for 〈k〉 = 6 and 〈k〉 = 8, respectively, as shown in Fig. 2(c). This indicates that the network is physically uncontrollable for most cases where structural controllability is deemed to be strong. BA scale-free networks behave similarly, as illustrated in Fig. 2(d). Another finding from Fig. 2 is that ND is symmetric about Pb = 0.5, but the symmetry is broken for
occur in a wide range of the parameter Pb, e.g., [0.3, 0.8] and [0.2, 0.9] for 〈k〉 = 6 and 〈k〉 = 8, respectively, as shown in Fig. 2(c). This indicates that the network is physically uncontrollable for most cases where structural controllability is deemed to be strong. BA scale-free networks behave similarly, as illustrated in Fig. 2(d). Another finding from Fig. 2 is that ND is symmetric about Pb = 0.5, but the symmetry is broken for  , indicating that there is no simple linear correlation between ND and
, indicating that there is no simple linear correlation between ND and  . It is thus necessary to find the fundamental structural properties responsible for the smallness of
. It is thus necessary to find the fundamental structural properties responsible for the smallness of  . Through a detailed analysis of the energy cost associated with controlling a simple one-dimensional chain and a double chain network (Methods) and of the energy scaling27, we identify the longest control chains (LCCs), the shortest paths through which the control energy is “flowed” to all nodes in the network, as the fundamental structural component responsible for the control energy. The longer the LCCs, the more singular the Gramian matrix, and the smaller the probability
. Through a detailed analysis of the energy cost associated with controlling a simple one-dimensional chain and a double chain network (Methods) and of the energy scaling27, we identify the longest control chains (LCCs), the shortest paths through which the control energy is “flowed” to all nodes in the network, as the fundamental structural component responsible for the control energy. The longer the LCCs, the more singular the Gramian matrix, and the smaller the probability  . The maximal LCC is effectively the control diameter of the network27.
. The maximal LCC is effectively the control diameter of the network27.

Structural controllability measure nD versus directional edge probability Pb for (a) ER random networks and (b) BA scale-free networks of size N = 1000 and three values of the average degree (〈k〉 = 4, 6, and 8). The dash-dotted lines represent the results obtained from the cavity method4,5, and the squares, triangles, and circles are simulation results from the maximum matching algorithm4. (c,d) Measure of physical controllability  for ER random and BA scale-free networks of size N = 100, respectively, where
for ER random and BA scale-free networks of size N = 100, respectively, where  is the probability that the condition number of the Gramian matrix is less than some physically reasonable threshold value. Comparing (a) with (c), or (b) with (d), we observe the striking phenomenon that, in the parameter regime where the number of driver nodes is minimized so that the corresponding networks are deemed to be most structurally controllable, they are physically uncontrollable. The phenomenon persists regardless of the network size and type. All nodes are self-loop free. The qualitative behavior is robust against variations in the value of
is the probability that the condition number of the Gramian matrix is less than some physically reasonable threshold value. Comparing (a) with (c), or (b) with (d), we observe the striking phenomenon that, in the parameter regime where the number of driver nodes is minimized so that the corresponding networks are deemed to be most structurally controllable, they are physically uncontrollable. The phenomenon persists regardless of the network size and type. All nodes are self-loop free. The qualitative behavior is robust against variations in the value of  .
.
Physical controllability of an electrical circuit network and a strategy to balance control energy and extra inputs
To further illustrate the concept of physical controllability, we consider a real one-dimensional cascade parallel RC circuit network, as schematically illustrated in Fig. 3(a). The network can be represented by a bidirectional 1D chain with self-loops for all the nodes, as shown in Fig. 3(b) (see Methods). The network size can be enlarged, say by one unit, by attaching an additional branch of resistor and capacitor at the right end of the circuit. The state ui(t) of node i at time t is the voltage of capacitor i, and the input voltage u(t) represents the control signal. The purpose of control is to drive the voltages of the capacitors from a set of values to another within time tf through the input voltage u(t). The control energy can then be calculated by Eq. (3). The actual energy dissipated in the circuit during the control process is given by

(a) A cascade parallel R-C circuit with L = 7 resistors (R1, R2, …, and RL, each of resistance 1Ω) and 7 capacitors (C1, C2, …, and CL, each of capacitance 1F). External voltage input u(t) is applied from the left side of the circuit, and the voltage of capacitor Ci is ui(t)(1 ≤ i ≤ L). An extra external current input ie(t) serves as a redundant control input injected into the capacitor C3, where i3 and i4 denote the currents through resistors R3 and R4, respectively. In absence of the extra current input, i3(t) − i4(t) is the current through the branch of C3. (b) Network representation of the circuit in (a) as a bidirectional 1D chain network of seven nodes, where the external voltage input u(t) is injected into node 1 (yellow driver node, the controller). The dynamical state of node i is described by the voltage of its capacitor, ui(t). Links (blue) between nodes are bidirectional and have uniform weight 1 in either direction. Each node has a self-link (red) of weight −2, except the ending node (node 7) whose self-link has weight −1. The extra external current input ie(t) serves as a redundant control input injected into node 3 of the network in (b). Now there are two driver nodes (yellow) in the network, nodes 1 and 3. (c) Energy required for controlling a unidirectional chain (red circle) and the corresponding circuit (blue square) as well as the dissipated energy (green triangle) of the circuit calculated from Eq. (4) versus chain length L. (d) Control and dissipated energies in presence of a redundant control signal to node i (i > 1), which breaks the chain into two subchains of lengths i and L − i, respectively.

where U(t) ≡ u(t) and I(t) are the input voltage and current at time t, respectively, and Ereal is in units of Joule. By making the circuit equivalent to a 1D chain network, we have three types of energy: the control energy of the actual circuit calculated from Eq. (3), the dissipated energy of the circuit from Eq. (4), and the control energy of the 1D equivalent network. Figure 3(c) shows that the control energy and the dissipated energy of the circuit do not differ substantially from the energy calculated from the unidirectional 1D chain. Among the three types of energy, the energy cost associated with the control process calculated from Eq. (4) is maximal.
Our extensive computations reveal that many structurally controllable networks are not physically controllable due to a combination of the ill-conditioned Gramian matrix and the finite computational or experimental error. Our analysis of the chain model (Methods) suggests a simple but effective strategy to reduce the energy significantly so as to enhance the physical controllability of the network: to place extra control signals along the LCCs to break the chains into shorter subchains. (In Methods, we show how the redundant control input can be planted in a circuit network.) To be illustrative, we consider a unidirectional 1D chain and add an extra control input at the ith node. As shown in Fig. 3(d), the magnitude of the control energy is reduced dramatically. The optimal location to place the extra control should be near in the middle of the chain so as to minimize the length of the LCC using a minimal number of extra control signals. In Fig. 3(d), the red circles represent a 1D chain and indicate that this simple strategy of adding one redundant control signal near the middle can reduce dramatically the required energy. For the circuit network in Fig. 3, the redundant control input can be realized by inducing external current input into a capacitor. In Fig. 3(d), the real energy is represented by green triangles, which reaches the minimum when the extra input is putting around the middle. Applying a single redundant control input can thus be an extremely efficient strategy to make the one-dimensional chain network physically controllable.
Control energy optimization of complex networks
For a complex network, there often exist multiple LCCs, requiring multiple redundant control inputs. With insights from the RC circuit example, we see that a strategy is to place one redundant control input at the middle of each LCC. In this case, each LCC in the network is broken into two subchains. Figure 4(a) shows the effect of this optimization strategy on the energy distribution. For comparison, the same number of redundant control inputs are also applied randomly throughout the network. The reduction ratio between the control energy under optimization strategy, ΔE, and the original control energy E characterizes the effectiveness of the optimization process. In particular, if the distribution of ΔE/E is concentrated on large values of ΔE/E, then the corresponding optimization strategy can be deemed to be effective. As shown in Fig. 4(a), for relatively large ΔE/E values, P(ΔE/E) as a result of optimization has values that are systematically larger than those under random control signal augmentation, while the opposite situation is observed for regions with relatively smaller ΔE/E. Thus, our optimization strategy outperforms the random strategy. The networks requiring proper optimization to be physically controlled are typically those with large control diameters. Figure 4(b) show that this is indeed the case: for networks with larger values of DC, the performance of our optimization strategy is significantly better than that with random placement of extra controllers.

(a) For control diameter DC = 4, distribution of the normalized energy reduction ΔE/E with redundant control in an ensemble of 10000 ER-random networks (〈k〉 = 6, Pb = 0.1). Results from the LCC-breaking optimization and random control augmentation are marked by “mid” (red circles) and “R-mid”(blue squares), respectively. For each network, a corresponding number of additional random control inputs are applied to the system 10 times to average out the statistical fluctuations. Panel (b) shows the ΔE/E distributions for networks with control diameter DC = 5.
Discussion
As stated in ref. 4, the ultimate proof that one understands a complex network completely lies in one’s ability to control it. However, we find that strong structural controllability is no guarantee that the network can be physically controlled. To resolve this paradox, We develop a physical controllability framework in terms of the control energy cost and the number of external input signals. To illustrate the framework, we focus on the situation where the structural controllability theory yields a minimum number of external input signals required for full control of the network, and determine whether in these situations the control energy is affordable so as to realize actual control. Our systematic computations and analysis reveal a rather unexpected phenomenon: due to the singular nature of the control Gramian matrix, in the parameter regimes where optimal structural controllability is achieved in the sense that the number of driver nodes is minimized, energy cost can be physically impossible to accommodate. To obtain a systematic understanding, we focus on a bidirectional 1D chain and study the relationship between energy and chain length. We then apply the 1D chain model to complex networks based on the idea of LCCs. In fact, the simple chain model captures the scaling behavior of energy distribution found in random networks23,27. The chain model also provides a guiding principle to articulate optimization strategies to reduce the control energy, which are tested using a RC circuit network and model complex networks.
An intuitive picture of the interrelation between mathematical controllability4,10 and our physical controllability is the following. In a fictitious world where the Gramian matrix is not singular (regardless of its condition number) and the computer round off or experimental errors are absolutely zero, using ND controllers as determined by the structural controllability theory can bring the networked system from any initial state to any final state in a given time. However, in the physical world, the inevitable measurement or computational errors will have a devastating consequence in the execution of actual control as the Gramian matrix is typically effectively singular with an arbitrarily large condition number. The dynamical interplay between the error and the singular Gramian matrix makes the system uncontrollable in the sense that it cannot be driven to the final state in finite time within the desirable precision and the energy required in the process diverges. Often, to realize physical control, many more control signals than those determined by the structural controllability theory are needed.
Our work indicates the difficulty of achieving actual control of complex networks associated with even linear dynamics. Although the mathematical controllability theories4,10 offer theoretically justified frameworks to guide us to apply external inputs on a minimum set of driver nodes, when we implement control to steer a system to a desired state, the energy consumption is likely to be too large to be affordable. For nonlinear dynamical networks, we continue to lack a general controllability framework and an understanding of required control energy, although progress has been made22,41,42,43,44,45,46, in spite of the fact that for specific types of systems, e.g., gene regulatory networks, controllability can be defined in terms of the coexisting attractors (final destinations) of the system45. Unlike linear networked systems, controllability of a nonlinear network depends on both the network structure and the system dynamics. We speculate that the physical controllability of a nonlinear dynamical network, if it can indeed be defined, would depend on both the structural controllability and the system dynamics. At the present we still know very little about controlling complex networks hosting nonlinear dynamics, and further effort is needed to address this challenging but greatly important problem shared by a wide range of fields.
Methods
Control energy of one-dimensional chain model
To gain insights into how a network’s structure affects the control energy, we rewrite Eq. (3) as  , where
, where  . Since H is positive definite and symmetric like W, its inverse H−1 can be decomposed in terms of its eigenvectors as H−1 = Q · Λ · QT, where Q = [q1, q2, …, qN] is composed of the orthonormal eigenvectors that satisfy Q · QT = QT · Q = I, and Λ = diag{λ1,λ2, …, λN} is the diagonal eigenvalue matrix of H−1 in a descending order. Numerically, we find that λ1 is typically much larger than other eigenvalues. We thus have
. Since H is positive definite and symmetric like W, its inverse H−1 can be decomposed in terms of its eigenvectors as H−1 = Q · Λ · QT, where Q = [q1, q2, …, qN] is composed of the orthonormal eigenvectors that satisfy Q · QT = QT · Q = I, and Λ = diag{λ1,λ2, …, λN} is the diagonal eigenvalue matrix of H−1 in a descending order. Numerically, we find that λ1 is typically much larger than other eigenvalues. We thus have  .
.
In an undirected network, the adjacency matrix A is positive definite and symmetric. We can decompose A into the form A = V · S · VT, where the columns of V constitute the orthonormal eigenvectors of A and S = diag{s1, s2, …, sN} is the diagonal eigenvalue matrix of A in a descending order. We thus have

Let

be the eigenvalue matrix of H in a descending order. The energy can be expressed as

We consider a bidiretional 1D chain network and provide an analytical calculation of the relationship between control energy and chain length L. In the undirected chain, the adjacency matrix is defined as

the control matrix is B = [1, 0, …, 0]T, and the eigenvalues and eigenvectors of A are, respectively,


Recall that  . Substituting this in Eqs (6) and (7), after some algebraic manipulation, we obtain
. Substituting this in Eqs (6) and (7), after some algebraic manipulation, we obtain

where D = diag{sin(θ), sin(2θ), …, sin(Lθ)}. and  with θ = π/(L + 1), j, k = 1, …, L.
with θ = π/(L + 1), j, k = 1, …, L.
The Rayleigh-Ritz theorem can be used to bound P as:

and y = [y1, y2, …, yL]T is an arbitrary nonzero column vector,  and
and  are the maximal and minimal eigenvalues of P, respectively. Letting T = 2tf, we have
are the maximal and minimal eigenvalues of P, respectively. Letting T = 2tf, we have

with  . Letting
. Letting  and performing a Taylor expansion on
and performing a Taylor expansion on  around t = 0, we obtain
around t = 0, we obtain  , with tj ∈ [0, T]. Now letting
, with tj ∈ [0, T]. Now letting  , we have
, we have  . Consequently, the numerator in the Rayleigh quotient can be expressed as
. Consequently, the numerator in the Rayleigh quotient can be expressed as

Since y = [y1, y2, …, yL]T is an arbitrary nonzero column vector, for each L and T, we can choose y = ym insofar as K1 and K2 are relatively small compared with K3. We can normalize  to arrive at
to arrive at

where  is the smallest eigenvalue of P. Since P is symmetric and positive definite, using Cholesky decomposition we can obtain its factorization40 as P = UT · U, where U is the upper triangular matrix with its diagonal being the square roots of eigenvalues of P. Equation (8) can then be written as
is the smallest eigenvalue of P. Since P is symmetric and positive definite, using Cholesky decomposition we can obtain its factorization40 as P = UT · U, where U is the upper triangular matrix with its diagonal being the square roots of eigenvalues of P. Equation (8) can then be written as  . Since orthonormal transform does not change the eigenvalues of a matrix, H has the same eigenvalues as
. Since orthonormal transform does not change the eigenvalues of a matrix, H has the same eigenvalues as  . Suppose
. Suppose  is the diagonal eigenvalue matrix of P in a descending order. We then have
is the diagonal eigenvalue matrix of P in a descending order. We then have

where j and k run from 1 to L. For arbitrary but fixed x0, the control energy E(tf) can be approximated as

where we see that E(tf) increases faster than exponential with L. As shown in Fig. 5(a), the energy required to control a unidirectional 1D chain nearly overlaps with that of a bidirectional one with identical weights. From Fig. 5(b–d) we see that Eq. (12) provides a reasonably accurate estimate of the control energy.

(a) Energies required to control a unidirectional chain Euni (purple circles) and a bidirectional one Ebi (green squares) versus chain length L. (b), (c) and (d) Control energies of bidirectional chain calculated by simulation (red squares),  (azure triangles), and chain length L as shown in Eq. (12) (navy crosses) for different values of the control time tf = 0.3, 0.5, 1, respectively.
(azure triangles), and chain length L as shown in Eq. (12) (navy crosses) for different values of the control time tf = 0.3, 0.5, 1, respectively.
Furthermore, we find numerically that Eq. (5) holds for random and scale-free networks. As shown in Fig. 6, there is a strong correlation between the average network control energy, 〈E〉, and the smallest eigenvalue of the H-matrix,  , for ER random and BA scale-free networks, indicating that the network control energy is essentially determined by the smallest eigenvalue of its H-matrix.
, for ER random and BA scale-free networks, indicating that the network control energy is essentially determined by the smallest eigenvalue of its H-matrix.

Network size is N = 100, directional link probability between any pair of nodes is Pb = 0.1, and average degree is (a) 〈k〉 = 6 for ER random networks and (b) 〈k〉 = 8 for BA sale-free networks.
Network representation of a circuit system
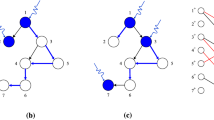
We consider a cascade parallel R-C circuit consisting of three identical resistors and capacitors as an example to illustrate how the circuit can be abstracted into a directed network, as shown in Fig. 7. For convenience, we set R1 = R2 = R3 = R and C1 = C2 = C3 = C, and denote the currents through R1, R2, and R3 as i1(t), i2(t), and i3(t), respectively. The equations of the circuit are

(a) A cascade parallel R-C circuit with 3 resistors (R1, R2, and R3, each of resistance 1Ω) and 3 capacitors (C1, C2, and C3, each of capacitance 1F), where u(t) is the external input voltage, u1(t), u2(t), and u3(t) are the voltages on the capacitors C1, C2, and C3, and i1(t), i2(t), and i3(t) are the currents through the resistors R1, R2, and R3, respectively. (b) Network representation of the circuit in (a). (c) Circuit with an extra external current input ie(t) into the capacitor C2. (d) The extra external current input ie(t) serves as a redundant control input injected into node 2 of the network in (b). There are two driver nodes (yellow) in the network: 1 and 2.

After some algebraic manipulation, we have

which can be written as

Setting R = 1Ω and C = 1F, we have

where

is the adjacency matrix of the network representing the circuit, and

is the control input matrix. The circuit has thus been transferred into a 3-node bidirectional 1D chain network with adjacency matrix A.
Implementation of extra control input in the circuit system
Without loss of generality, we inject an extra external current input ie(t) into the capacitor C2, and the circuit equations become:

The state equations are

where

is the control input matrix of the circuit under the original control input u(t) on node 1 and a redundant control input ie(t) to node 2. Similarly, the redundant control input can be injected into any capacitor.
It is necessary to keep all other nodes unaffected while introducing exactly one extra control input into the circuit. However, any additional voltage change in any part of the circuit can lead to voltage changes on all the capacitors. A change in the current through a capacitor will not affect the currents in other components of the network, since only the time derivative of its voltage is affected. Thus, a meaningful way to introduce an extra control signal input to one node of a circuit’s network is to inject current into one particular capacitor in the circuit.
Additional Information
How to cite this article: Wang, L.-Z. et al. Physical controllability of complex networks. Sci. Rep. 7, 40198; doi: 10.1038/srep40198 (2017).
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
References
Lombardi, A. & Hörnquist, M. Controllability analysis of networks. Phys. Rev. E 75, 056110 (2007).
Liu, B., Chu, T., Wang, L. & Xie, G. Controllability of a leader-follower dynamic network with switching topology. IEEE Trans. Automat. Contr. 53, 1009–1013 (2008).
Rahmani, A., Ji, M., Mesbahi, M. & Egerstedt, M. Controllability of multi-agent systems from a graph-theoretic perspective. SIAM J. Contr. Optim. 48, 162–186 (2009).
Liu, Y.-Y., Slotine, J.-J. & Barabási, A.-L. Controllability of complex networks. Nature (London) 473, 167–173 (2011).
Wang, W.-X., Ni, X., Lai, Y.-C. & Grebogi, C. Optimizing controllability of complex networks by minimum structural perturbations. Phys. Rev. E 85, 026115 (2012).
Nacher, J. C. & Akutsu, T. Dominating scale-free networks with variable scaling exponent: heterogeneous networks are not difficult to control. New J. Phys. 14, 073005 (2012).
Yan, G., Ren, J., Lai, Y.-C., Lai, C.-H. & Li, B. Controlling complex networks: How much energy is needed? Phys. Rev. Lett. 108, 218703 (2012).
Nepusz, T. & Vicsek, T. Controlling edge dynamics in complex networks. Nat. Phys. 8, 568–573 (2012).
Liu, Y.-Y., Slotine, J.-J. & Barabási, A.-L. Observability of complex systems. Proc. Natl. Acad. Sci. (USA) 110, 2460–2465 (2013).
Yuan, Z.-Z., Zhao, C., Di, Z.-R., Wang, W.-X. & Lai, Y.-C. Exact controllability of complex networks. Nat. Commun. 4, 2447 (2013).
Jia, T. et al. Emergence of bimodality in controlling complex networks. Nat. Commun. 4, 3002 (2013).
Delpini, D. et al. Evolution of controllability in interbank networks. Sci. Rep. 3, 1626 (2013).
Nacher, J. C. & Akutsu, T. Structural controllability of unidirectional bipartite networks. Sci. Rep. 3, 1647 (2013).
Menichetti, G., Dall’Asta, L. & Bianconi, G. Network controllability is determined by the density of low in-degree and out-degree nodes. Phys. Rev. Lett. 113, 078701 (2014).
Ruths, J. & Ruths, D. Control profiles of complex networks. Science 343, 1373–1376 (2014).
Wuchty, S. Controllability in protein interaction networks. Proc. Natl. Acad. Sci. (USA) 111, 7156–7160 (2014).
Yuan, Z.-Z., Zhao, C., Wang, W.-X., Di, Z.-R. & Lai, Y.-C. Exact controllability of multiplex networks. New J. Phys. 16, 103036 (2014).
Pasqualetti, F., Zampieri, S. & Bullo, F. Controllability metrics, limitations and algorithms for complex networks. IEEE Trans. Cont. Net. Syst. 1, 40–52 (2014).
Xiao, Y.-D., Lao, S.-Y., Hou, L.-L. & Bai, L. Edge orientation for optimizing controllability of complex networks. Phys. Rev. E 90, 042804 (2014).
Sorrentino, F. Effects of the network structural properties on its controllability. Chaos 17, 033101 (2014).
Wu, F.-X., Wu, L., Wang, J.-X., Liu, J. & Chen, L.-N. Transittability of complex networks and its applications to regulatory biomolecular networks. Sci. Rep. 4, 4819 (2014).
Whalen, A. J., Brennan, S. N., Sauer, T. D. & Schiff, S. J. Observability and controllability of nonlinear networks: The role of symmetry. Phys. Rev. X 5, 011005 (2015).
Yan, G. et al. Spectrum of controlling and observing complex networks. Nat. Phys. 11, 779–786 (2015).
Chen, Y.-Z., Wang, L.-Z., Wang, W.-X. & Lai, Y.-C. The paradox of controlling complex networks: control inputs versus energy requirement. arXiv:1509.03196v1 (2015).
Nacher, J. C. & Akutsu, T. Structurally robust control of complex networks. Phys. Rev. E 91, 012826 (2015).
Summers, T. H., Cortesi, F. L. & Lygeros, J. On submodularity and controllability in complex dynamical networks. IEEE Trans. Cont. Net. Syst. 3, 91–101 (2015).
Chen, Y.-Z., Wang, L.-Z., Wang, W.-X. & Lai, Y.-C. Energy scaling and reduction in controlling complex networks. Royal Soc. Open Sci. 3, 160064 (2016).
Liu, Y.-Y. & Barabási, A.-L. Control principles of complex systems. Rev. Mod. Phys. 88, 035006 (2016).
Kalman, R. E. Mathematical description of linear dynamical systems. J. Soc. Indus. Appl. Math. Ser. A 1, 152–192 (1963).
Lin, C.-T. Structural controllability. IEEE Trans. Automat. Contr. 19, 201–208 (1974).
Hopcroft, J. E. & Karp, R. M. An n5/2 algorithm for maximum matchings in bipartite graphs. SIAM J. Comput. 2, 225–231 (1973).
Zhou, H. & Ou-Yang, Z.-C. Maximum matching on random graphs. arXiv preprint cond-mat/0309348 (2003).
Zdeborová, L. & Mézard, M. The number of matchings in random graphs. J. Stat. Mech. 2006, P05003 (2006).
Liu, Y.-Y., Slotine, J.-J. & Barabási, A. L. Control centrality and hierarchical structure in complex networks. PLoS ONE 7, e44459 (2012).
Hautus, M. L. J. Controllability and observability conditions of linear autonomous systems. In Ned. Akad. Wetenschappen, Proc. Ser. A vol. 72, 443–448 (Elsevier, 1969).
Rugh, W. J. Linear Systems Theory (Prentice-Hall, Inc., 1996).
Chen, C. T. Linear Systems Theory and Design 1st edn. (Oxford University Press, Inc., 1984).
Erdös, P. & Rényi, A. On random graphs, i. Publ. Math. 6, 290–297 (1959).
Albert, R. & Barabási, A.-L. Statistical mechanics of complex networks. Rev. Mod. Phys 74, 47–97 (2002).
Strang, G. Linear Algebra and Its Applications (Academic Press, 1976).
Sorrentino, F., di Bernardo, M., Garofalo, F. & Chen, G. Controllability of complex networks via pinning. Phys. Rev. E 75, 046103 (2007).
Fiedler, B., Mochizuki, A., Kurosawa, G. & Saito, D. Dynamics and control at feedback vertex sets. i: Informative and determining nodes in regulatory networks. J. Dyn. Differ. Eqns. 25, 563–604 (2013).
Mochizuki, A., Fiedler, B., Kurosawa, G. & Saito, D. Dynamics and control at feedback vertex sets. ii: A faithful monitor to determine the diversity of molecular activities in regulatory networks. J. Theor. Biol. 335, 130–146 (2013).
Lai, Y.-C. Controlling complex, nonlinear dynamical networks. Nat. Sci. Rev. 1, 339–341 (2014).
Wang, L.-Z. et al. A geometrical approach to control and controllability of nonlinear dynamical networks. Nat. Commun. 7, 11323 (2016).
Zanudo, J. G. T., Yang, G. & Albert, R. Structure-based control of complex networks with nonlinear dynamics. arXiv:1605.08415 (2016).
Acknowledgements
We thank Dr. H. Liu for tremendous help with the analysis of the 1D chain model. This work was supported by ARO under Grant No. W911NF-14-1-0504. Y.C.L. would also like to acknowledge support from the Vannevar Bush Faculty Fellowship program sponsored by the Basic Research Office of the Assistant Secretary of Defense for Research and Engineering and funded by the Office of Naval Research through Grant No. ~N00014-16-1-2828.
Author information
Authors and Affiliations
Contributions
Y.C.L. conceived the research. Y.C.L., L.Z.W. and Y.Z.C. designed the research. L.Z.W. and Y.Z.C. carried out simulations. All participated in result analysis. Y.C.L. wrote the paper with help from L.Z.W. and Y.Z.C.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Wang, LZ., Chen, YZ., Wang, WX. et al. Physical controllability of complex networks. Sci Rep 7, 40198 (2017). https://doi.org/10.1038/srep40198
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep40198
This article is cited by
-
Approximating the Controllability Robustness of Directed Random-graph Networks Against Random Edge-removal Attacks
International Journal of Control, Automation and Systems (2023)
-
Data-driven control of complex networks
Nature Communications (2021)
-
On the effects of memory and topology on the controllability of complex dynamical networks
Scientific Reports (2020)
-
Optimizing target nodes selection for the control energy of directed complex networks
Scientific Reports (2020)
-
Observability of Network Systems: A Critical Review of Recent Results
Journal of Control, Automation and Electrical Systems (2020)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
