
Abstract
It was recently realised that quantum theory allows for so-called causally nonseparable processes, which are incompatible with any definite causal order. This was first suggested on a rather abstract level by the formalism of process matrices, an extension of the quantum formalism which only assumes that quantum theory holds locally in some observers’ laboratories, but does not impose a global causal structure; it was then shown, on a more practical level, that the quantum switch—a new, already implementable resource for quantum computation that goes beyond causally ordered circuits—provided precisely a physical example of a causally nonseparable process. To demonstrate that a given process is causally nonseparable, the concept of witnesses of causal nonseparability was introduced. Here we present a shorter introduction to this concept, and concentrate on some explicit examples—by considering in particular different noise models for the quantum switch—to show how to construct and use such witnesses in practice.
Similar content being viewed by others

Introduction
In our common understanding of the world, we typically perceive events as happening one after another, in a given order. Relations between events are understood in terms of causes and effects, where a cause can only precede an effect. Events can thus be embedded in a causal structure, which defines the causal order between them.
This viewpoint is ingrained for instance in the circuit model for computation or information processing, where operations are performed by gates that are applied in a definite order. While the assumption that events follow a definite causal order seems natural in the classical world, one may nevertheless wonder whether it must really always be so. One may in particular become suspicious when entering the quantum world, where the properties of physical systems are not always well-defined.
A general framework, that of process matrices, was recently introduced to investigate physical processes without pre-assuming a definite global causal structure; the framework only assumes that quantum theory correctly describes what happens locally, in some observers’ laboratories1. It was shown that this allows for processes that are incompatible with any definite causal order—so-called causally nonseparable processes. The framework was first introduced on a rather abstract level, with no clear physical interpretation given to the first examples of causally nonseparable processes. However, a concrete physical example of a causally nonseparable process was later exhibited2,3: namely, the recently proposed quantum switch, a new resource for quantum computation where the order of operations is controlled by a qubit in a superposition of two different states—which indeed does not fit in the standard framework of causally ordered quantum circuits4.
To ensure that this notion of causal nonseparability has any practical meaning, one needs of course to be able to verify that a given process is causally nonseparable. This was first done in ref. 1 through the violation of a causal inequality—an inequality bounding the correlations compatible with a definite causal order, and whose violation can only be obtained from a causally nonseparable process. This is however a very strong argument for causal nonseparability. In fact, not all causally nonseparable processes violate a causal inequality; the quantum switch indeed provides such an example2,3.
More recently we introduced, in analogy with entanglement witnesses, the concept of witnesses of causal nonseparability (or causal witnesses, as we initially called them)2. Here a witness corresponds to an operator that can (in principle) be ‘measured’ on a given process by combining the statistics of various operations, and whose expectation value, if negative, certifies the causal nonseparability of the process. We showed in particular that a witness can be efficiently constructed for any causally nonseparable process.
The objective of this paper is to present a somewhat shorter introduction to this new concept of witnesses of causal nonseparability. We will avoid here some of the technicalities in the proofs, and refer directly to ref. 2 for that. We will then present several different explicit examples of causally nonseparable processes and of witnesses—in particular for the quantum switch, investigating its robustness to different kinds of noise—so as to illustrate how to construct and use them in practice.
The process matrix formalism
In the general bipartite case
Consider an experiment with two parties, Alice and Bob, sitting in closed laboratories and exchanging physical systems. In a single run of the experiment, each party opens their lab only once to let some incoming system enter, and once to send some outgoing system out. They can perform some operation on these systems, which may output some result a for Alice and b for Bob.
While we do not pre-suppose a definite causal order between the events happening in Alice and Bob’s labs, we assume that what happens locally inside the labs is correctly described by quantum theory. That means, we can attach some Hilbert spaces  and
and  to their incoming systems and some Hilbert spaces
to their incoming systems and some Hilbert spaces  and
and  to their outgoing systems, and their choices of operations correspond to so-called quantum instruments5—i.e., sets of completely positive (CP) maps which sum up to CP and trace-preserving maps6. These can conveniently be represented, using the Choi-Jamiołkowski (CJ) isomorphism, by positive semidefinite matrices
to their outgoing systems, and their choices of operations correspond to so-called quantum instruments5—i.e., sets of completely positive (CP) maps which sum up to CP and trace-preserving maps6. These can conveniently be represented, using the Choi-Jamiołkowski (CJ) isomorphism, by positive semidefinite matrices  and
and  , where AI and AO (resp. BI and BO) denote the spaces of Hermitian linear operators over Alice’s (Bob’s) incoming and outgoing Hilbert spaces, and where the subscripts refer to the outcomes a, b they correspond to. To define valid instruments, these matrices must satisfy
, where AI and AO (resp. BI and BO) denote the spaces of Hermitian linear operators over Alice’s (Bob’s) incoming and outgoing Hilbert spaces, and where the subscripts refer to the outcomes a, b they correspond to. To define valid instruments, these matrices must satisfy

where  denotes the identity operator in the space X (in general, superscripts on operators will refer to the space they are acting on) and trX is the partial trace over X. In this paper we will only consider finite-dimensional Hilbert spaces; the dimension of a Hilbert space
denotes the identity operator in the space X (in general, superscripts on operators will refer to the space they are acting on) and trX is the partial trace over X. In this paper we will only consider finite-dimensional Hilbert spaces; the dimension of a Hilbert space  will be denoted dX.
will be denoted dX.
Process matrices
The correlations established by Alice and Bob in such a scenario can be described by the probabilities  that Alice and Bob obtain the outcomes a, b attached to the CP maps
that Alice and Bob obtain the outcomes a, b attached to the CP maps  . As shown in1, these correlations can be written in the form
. As shown in1, these correlations can be written in the form

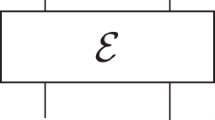
(with tr now denoting the full trace), for some Hermitian matrix  . This so-called process matrix is the central object of the formalism; it describes the physical resource (the process) that connects Alice and Bob’s labs, and generalises both the notion of a quantum state—in which case Eq. (2) reduces to the standard Born rule—and of a quantum channel; see Fig. 1.
. This so-called process matrix is the central object of the formalism; it describes the physical resource (the process) that connects Alice and Bob’s labs, and generalises both the notion of a quantum state—in which case Eq. (2) reduces to the standard Born rule—and of a quantum channel; see Fig. 1.

Two parties, Alice and Bob, perform some quantum operations  and
and  —some CP maps with outcomes a, b—which act on some incoming systems in the Hilbert spaces
—some CP maps with outcomes a, b—which act on some incoming systems in the Hilbert spaces  ,
,  and generate some outgoing systems in the Hilbert spaces
and generate some outgoing systems in the Hilbert spaces  ,
,  . The process matrix W represents the physical resource that connects their labs, generalising the notions of quantum states and of quantum channels.
. The process matrix W represents the physical resource that connects their labs, generalising the notions of quantum states and of quantum channels.
Not all matrices  define valid processes. As one can show1,2, the constraint that all probabilities obtained through (2) must be nonnegative and normalised (including in situations where Alice and Bob may share and interact with ancillary entangled systems) leads to the following conditions that valid process matrices must satisfy:
define valid processes. As one can show1,2, the constraint that all probabilities obtained through (2) must be nonnegative and normalised (including in situations where Alice and Bob may share and interact with ancillary entangled systems) leads to the following conditions that valid process matrices must satisfy:



with  and where we used (and will use throughout the paper) the following notation, introduced in2:
and where we used (and will use throughout the paper) the following notation, introduced in2:

Equation (3a) defines a linear subspace  , which valid process matrices belong to Eq. (3b) tells us that process matrices are in the set
, which valid process matrices belong to Eq. (3b) tells us that process matrices are in the set  of positive semidefinite matrices. We shall often ignore, for convenience, the normalisation condition (3c), and define the set of nonnormalised process matrices as
of positive semidefinite matrices. We shall often ignore, for convenience, the normalisation condition (3c), and define the set of nonnormalised process matrices as  ; as can easily be checked, this set is a closed convex cone.
; as can easily be checked, this set is a closed convex cone.
Causally separable vs causally nonseparable processes
Processes that do not allow Bob to signal to Alice are compatible with a causal order where Alice acts before Bob, which we write  . We shall generically denote by
. We shall generically denote by  the corresponding process matrices; these simply represent standard, causally ordered quantum circuits. One can show that these are the matrices in
the corresponding process matrices; these simply represent standard, causally ordered quantum circuits. One can show that these are the matrices in  , which satisfy2,7,8
, which satisfy2,7,8



Note that Eq. (5a) implies Eq. (3a), which ensures that the  matrices thus characterised are valid process matrices. Equation (5a) thus defines a linear subspace
matrices thus characterised are valid process matrices. Equation (5a) thus defines a linear subspace  . Together with Eq. (5b), we can define the closed convex cone of nonnormalised process matrices compatible with the causal order
. Together with Eq. (5b), we can define the closed convex cone of nonnormalised process matrices compatible with the causal order  , as
, as  .
.
Similarly, processes that do not allow Alice to signal to Bob are compatible with a causal order  , where Bob acts before Alice. The corresponding process matrices
, where Bob acts before Alice. The corresponding process matrices  (which again simply represent standard, causally ordered quantum circuits) satisfy
(which again simply represent standard, causally ordered quantum circuits) satisfy



Equation (6a) defines a linear subspace  . Together with Eq. (6b), we define the closed convex cone of nonnormalised process matrices compatible with the causal order
. Together with Eq. (6b), we define the closed convex cone of nonnormalised process matrices compatible with the causal order  , as
, as  .
.
One can still easily make sense of a convex mixture

representing a process that is compatible with the causal order  with some probability q ∈ [0, 1], and compatible with the causal order
with some probability q ∈ [0, 1], and compatible with the causal order  with some probability 1 − q. Process matrices that can be decomposed in this form (or directly, the process they represent) are said to be causally separable. Ignoring again the normalisation constraint, the set of nonnormalised causally separable process matrices also forms a closed convex cone, obtained as the Minkowski sum
with some probability 1 − q. Process matrices that can be decomposed in this form (or directly, the process they represent) are said to be causally separable. Ignoring again the normalisation constraint, the set of nonnormalised causally separable process matrices also forms a closed convex cone, obtained as the Minkowski sum

As first proven in1, there exist valid process matrices that cannot be decomposed as in (7), and which are therefore not in  . These are called causally nonseparable, and represent processes that are incompatible with any definite causal order—be it well-defined, or only determined with some probability.
. These are called causally nonseparable, and represent processes that are incompatible with any definite causal order—be it well-defined, or only determined with some probability.
In a particular tripartite scenario
The scenario considered before can be generalised to more parties. While it is fairly easy to construct and characterise multipartite process matrices1,2,9 defining the notion of causal (non)separability is somewhat more subtle in such a setting3. In ref. 2 we restricted our study to a specific tripartite scenario, whose analysis matches that in the bipartite case quite closely (note indeed the similarities between the equations below and those in the previous subsection). We will again restrict ourselves to that case here, which is already quite relevant in practice, as we will see with the example of the quantum switch below.
Process matrices
In this particular scenario, the third party we introduce, Charlie, only has an incoming system in a Hilbert space  (as before, we will denote by
(as before, we will denote by  its dimension, and by CI the space of Hermitian linear operators acting on
its dimension, and by CI the space of Hermitian linear operators acting on  ), with no outgoing system—or equivalently: Charlie has a trivial outgoing system, in a trivial Hilbert space
), with no outgoing system—or equivalently: Charlie has a trivial outgoing system, in a trivial Hilbert space  of dimension
of dimension  . For a CP map
. For a CP map  applied by Charlie, which reduces here to an element of a positive operator-valued measure (POVM)2,6 the generalised Born rule (2) simply becomes
applied by Charlie, which reduces here to an element of a positive operator-valued measure (POVM)2,6 the generalised Born rule (2) simply becomes

with now a process matrix  in
in  .
.
Valid process matrices in this scenario satisfy2



with again  . Equation (10a) defines, as before, a linear subspace
. Equation (10a) defines, as before, a linear subspace  . We can again characterise the closed convex cone of nonnormalised process matrices as
. We can again characterise the closed convex cone of nonnormalised process matrices as  .
.
Causally separable vs causally nonseparable processes
Since we assume that Charlie does not send any outgoing system out of his lab, one can argue2 that the only relevant causal orders are those where he is last; we are thus left to consider only the orders  and
and  .
.
The process matrices  that are compatible with the causal order
that are compatible with the causal order  (and which thus, again, simply represent standard, causally ordered quantum circuits) are those, which satisfy2,7,8
(and which thus, again, simply represent standard, causally ordered quantum circuits) are those, which satisfy2,7,8



Equation (11a) defines here a linear subspace  . Together with Eq. (11b), we define the closed convex cone of nonnormalised process matrices compatible with the causal order
. Together with Eq. (11b), we define the closed convex cone of nonnormalised process matrices compatible with the causal order  , as
, as  .
.
Similarly, the process matrices  that are compatible with the causal order
that are compatible with the causal order  are those which satisfy
are those which satisfy



Equation (12a) defines a linear subspace  . The closed convex cone of nonnormalised process matrices compatible with the causal order
. The closed convex cone of nonnormalised process matrices compatible with the causal order  is defined here as
is defined here as  .
.
In analogy with the previous case, any process matrix in the present scenario that can be decomposed as

with q ∈ [0, 1], is called causally separable. (This definition of causal separability was proposed in2 for the particular tripartite case we consider here, which differs from that proposed in3 for general multipartite processes.) The set of nonnormalised causally separable process matrices also forms a closed convex cone, which can again be expressed here as the Minkowski sum

Process matrices that cannot be decomposed as in (13), and are thus not in  , are called causally nonseparable. These are incompatible with any definite causal order (with Charlie last)—be it well-defined, or only determined with some probability.
, are called causally nonseparable. These are incompatible with any definite causal order (with Charlie last)—be it well-defined, or only determined with some probability.
Witnesses of causal nonseparability
Definition and characterisation
The concept of causal nonseparability represents a new type of resource compatible (at least locally) with quantum theory, which allows us to go beyond the standard framework of causally ordered quantum circuits4. An important question, to ensure this concept has some concrete physical ground, is: how to detect it and verify it in practice? One possible approach, used by Oreshkov et al. in1, is through the violation of a so-called causal inequality—namely, a bound on the correlations that are compatible with a definite causal order. Since all correlations generated by causally separable processes must satisfy such an inequality, a violation indeed ensures that the underlying process is causally nonseparable. Note that such a demonstration is device-independent, in the sense that one only looks at the observed correlations, without making assumptions on what operations the devices perform. Violating a causal inequality is however quite a strong requirement. In fact, just as not all entangled quantum states violate a Bell inequality10,11, not all causally nonseparable processes violate a causal inequality2,3 (an example being the quantum switch described below): one must then use less stringent criteria to detect causal nonseparability.
In ref. 2 we introduced for that, in analogy with entanglement witnesses12,13, the concept of witnesses of causal nonseparability—which we simply abbreviated (somewhat abusively) to causal witnesses. In this context, a witness is defined as any Hermitian operator S such that

for all causally separable process matrices  . Since the set of causally separable process matrices is convex, then according to the separating hyperplane theorem14, for any causally nonseparable
. Since the set of causally separable process matrices is convex, then according to the separating hyperplane theorem14, for any causally nonseparable  there must always exist a witness such that
there must always exist a witness such that  , which can thus be used to certify the causal nonseparability of
, which can thus be used to certify the causal nonseparability of  ; see Fig. 2. Note that the measurement of a witness is a device-dependent test of causal nonseparability, as the physical operations of the parties must faithfully realise S to be able to test Eq. (15).
; see Fig. 2. Note that the measurement of a witness is a device-dependent test of causal nonseparability, as the physical operations of the parties must faithfully realise S to be able to test Eq. (15).

The set of causally separable process matrices, schematically represented by the inner ellipse, is closed and convex. From the separating hyperplane theorem, for any causally nonseparable process matrix  (in the larger ellipse containing all valid process matrices), there exists a hyperplane, represented by the solid line, that separates it from all causally separable process matrices
(in the larger ellipse containing all valid process matrices), there exists a hyperplane, represented by the solid line, that separates it from all causally separable process matrices  . That is, there exists a Hermitian operator S—a witness of causal nonseparability—such that
. That is, there exists a Hermitian operator S—a witness of causal nonseparability—such that  for all
for all  , but
, but  . Solving the SDP problems presented below provides such a witness, which is optimal with respect to the resistance of
. Solving the SDP problems presented below provides such a witness, which is optimal with respect to the resistance of  to white noise, represented by the process matrix
to white noise, represented by the process matrix  : as depicted on the Figure, it detects the causal nonseparability of all process matrices
: as depicted on the Figure, it detects the causal nonseparability of all process matrices  for r lower than the random robustness r* (directly obtained as a result of the SDP optimisation) above which
for r lower than the random robustness r* (directly obtained as a result of the SDP optimisation) above which  (r) becomes causally separable.
(r) becomes causally separable.
According to the above definition, and considering the trace as the Hilbert–Schmidt inner product, the set S of witnesses of causal nonseparability is simply the dual cone (which we denote using an asterisk) of the cone of nonnormalised causally separable process matrices:

In the bipartite and particular tripartite cases considered here, this observation allows us to easily characterise the sets of witnesses  , from the previous definitions of the corresponding cones
, from the previous definitions of the corresponding cones  ; we do this explicitly in the Supplementary Information (SI), Part A, and report these characterisations in the Methods section below, for convenience.
; we do this explicitly in the Supplementary Information (SI), Part A, and report these characterisations in the Methods section below, for convenience.
Note that for any S⊥ in the orthogonal complement  of the linear subspace
of the linear subspace  , and for any valid process matrix W in
, and for any valid process matrix W in  , one has
, one has  . Hence, adding any term
. Hence, adding any term  to a witness S simply gives another witness, giving the same value of tr[S · W] for any valid W. By choosing for instance S⊥ = LV(S) − S, where LV is the projector onto the linear subspace
to a witness S simply gives another witness, giving the same value of tr[S · W] for any valid W. By choosing for instance S⊥ = LV(S) − S, where LV is the projector onto the linear subspace  , one thus obtains a witness in
, one thus obtains a witness in  . For practical reasons, we will often be led to restrict the search of witnesses within the subspace
. For practical reasons, we will often be led to restrict the search of witnesses within the subspace  ; for that purpose we also define the (closed convex) cone of witnesses in
; for that purpose we also define the (closed convex) cone of witnesses in  as
as  .
.
Determining causal (non) separability through semidefinite programming
To determine whether a given process is causally separable or not, one possible approach is to rephrase the question as an optimisation problem, and ask how much noise can be added before it becomes causally separable.
Let us consider for now the case of ‘white noise’, represented by the process matrix

with  or
or  in the bipartite and tripartite cases, and which prepares the incoming systems of all parties in a maximally mixed state. For a given process matrix W under consideration, we shall consider the noisy process
in the bipartite and tripartite cases, and which prepares the incoming systems of all parties in a maximally mixed state. For a given process matrix W under consideration, we shall consider the noisy process

and investigate its causal nonseparability. Remembering that the normalisation of W(r) is irrelevant to check whether it is in the convex cone  of causally separable processes, this leads us to define the following optimisation problem:
of causally separable processes, this leads us to define the following optimisation problem:

From the previous characterisation of the convex cone  , one can see that this defines a semidefinite programming (SDP) problem15, which can be solved efficiently. For ease of reference, we provide in the Methods section a more explicit description of this problem in terms of positive semidefinite constraints; see Eqs (52) and (54) for the bipartite and tripartite cases, respectively. As can be seen, solving this problem provides an explicit decomposition of W(r*), where r* is the optimal solution of (19), as a convex combination of processes
, one can see that this defines a semidefinite programming (SDP) problem15, which can be solved efficiently. For ease of reference, we provide in the Methods section a more explicit description of this problem in terms of positive semidefinite constraints; see Eqs (52) and (54) for the bipartite and tripartite cases, respectively. As can be seen, solving this problem provides an explicit decomposition of W(r*), where r* is the optimal solution of (19), as a convex combination of processes  and
and  . In analogy with the robustness of entanglement16, the quantity max[r*, 0] quantifies the robustness of the process W with respect to white noise—or random robustness2. In particular, a value r* > 0 implies that W is causally nonseparable.
. In analogy with the robustness of entanglement16, the quantity max[r*, 0] quantifies the robustness of the process W with respect to white noise—or random robustness2. In particular, a value r* > 0 implies that W is causally nonseparable.
The ‘primal’ SDP problem (19) is intimately linked to its ‘dual’ problem, which is here2

and whose optimal solution S* provides precisely, in the case where tr[S* · W] < 0, a witness of the causal nonseparability of W. Furthermore, the Duality Theorem for SDP problems15 implies that the solutions of the primal and dual problems satisfy

It follows in particular that tr[S* · W(r)] < 0 for all r < r*, i.e. for all r such that W(r) is causally nonseparable: this makes the witness S* optimal to detect the causal nonseparability of W when subjected to white noise, see Fig. 2.
As for the primal problem, we provide in the Methods section a more explicit description of the dual problem (20) that is better suited for practical use; see Eqs (53) and (54). It is worth noting that, as discussed previously, adding any term  to S will not change the value of tr[S · W], nor of tr[S ·
to S will not change the value of tr[S · W], nor of tr[S ·  ]. Hence, the problem (20) is formally equivalent to one, where the constraint
]. Hence, the problem (20) is formally equivalent to one, where the constraint  would be replaced by
would be replaced by  ; nevertheless, in practice, optimising over the whole (non-pointed) cone
; nevertheless, in practice, optimising over the whole (non-pointed) cone  may make the numerical solvers unstable2.
may make the numerical solvers unstable2.
Note that depending on the practical physical implementation of a process W, different noise models may also be relevant. One could consider for instance a mixture with another fixed process W°, and thus replace  in the primal SDP problem (19) by W°. The normalisation constraint in the dual problem (20) would then be replaced by tr[S · W°] = 1 and one can show, following similar proofs to those of ref. 2, that as long as W° is in the relative interior of
in the primal SDP problem (19) by W°. The normalisation constraint in the dual problem (20) would then be replaced by tr[S · W°] = 1 and one can show, following similar proofs to those of ref. 2, that as long as W° is in the relative interior of  (i.e., the interior of
(i.e., the interior of  within
within  ), the SDP problems would still be solved efficiently, with their optimal solutions still satisfying (21).
), the SDP problems would still be solved efficiently, with their optimal solutions still satisfying (21).
Another case of interest is that of robustness to worst case noise, as also considered in ref. 2. One can define in this case the notion of generalised robustness (again in analogy with entanglement17), which can also be obtained through SDP. Interestingly, the generalised robustness can be used to define a proper measure of causal nonseparability as it is (contrary to the random robustness) monotonous under local operations2.
Imposing further constraints on the witnesses
In order to ‘measure’ a witness S—i.e., to estimate the value tr[S · W] (and check its sign)—one can in principle simply decompose it as a linear combination of products of CP (trace non-increasing) maps, implement these maps (provided this can be done even if the causal order between the parties is not well-defined), estimate their probabilities, and combine the statistics in an appropriate way (as illustrated for instance in the next section)2.
In some cases, one may however not be able to implement all required CP maps, but may be restricted to CP maps from a certain class only—e.g., one may only be able to realise unitary operations. In that case, not all witnesses can be measured, and it then makes sense to restrict the search of witnesses to those that are implementable in practice. To do this, one can directly modify the dual problem (20) and replace the search space  by the set
by the set  of allowed witnesses (while no longer necessarily restricting the search to witnesses within
of allowed witnesses (while no longer necessarily restricting the search to witnesses within  ).
).
Of course, with such an additional restriction the witnesses we shall obtain may not be optimal, and we will in general not be able to witness all causally nonseparable processes. Nevertheless, this possibility to add some constraints on the possible witnesses may be useful in practice, as we will illustrate below with the quantum switch.
Case studies
Let us now consider a few concrete examples to illustrate how one can construct witnesses and characterise causal nonseparability in practice. We start with a family of bipartite processes investigated already in ref. 18, and then move on to the example of the quantum switch, for which we will consider different noise models and show how to add specific constraints on the witnesses we shall construct.
A family of bipartite process matrices
In ref. 18, the following family of process matrices was introduced:

where Z and X are the Pauli matrices, the superscripts indicate to which system each operator is applied, and tensor products are implicit.  generalises in particular the process matrix originally considered in ref. 1, obtained for
generalises in particular the process matrix originally considered in ref. 1, obtained for  . One can easily check that
. One can easily check that  satisfies Eqs (3a) and (3c), and that it is positive semidefinite—hence, it is a valid process matrix—if and only if
satisfies Eqs (3a) and (3c), and that it is positive semidefinite—hence, it is a valid process matrix—if and only if  .
.
We solved, for different values of η1, η2, the dual SDP problem (20)—or rather, its more explicit formulation given in (53)—using the Matlab software CVX19, and obtained (up to numerical precision) the witnesses

where sgn is the sign function (for  we recover the witness obtained in ref. 2).
we recover the witness obtained in ref. 2).
To verify that  is indeed a valid witness, one can check that
is indeed a valid witness, one can check that  and
and  : see the characterisation of witnesses in the bipartite case given in the Methods section, Eqs (43)–(44),. Applying
: see the characterisation of witnesses in the bipartite case given in the Methods section, Eqs (43)–(44),. Applying  to
to  , one gets
, one gets

which shows that  is causally nonseparable (the trace above is negative) for
is causally nonseparable (the trace above is negative) for  , and its random robustness in that case is
, and its random robustness in that case is  .
.
For  on the other hand, we find that
on the other hand, we find that  is causally separable. Solving the primal SDP problem (19)—or rather, its more explicit formulation (52)—provides an explicit decomposition as a convex sum of processes compatible with a definite causal order, in the form
is causally separable. Solving the primal SDP problem (19)—or rather, its more explicit formulation (52)—provides an explicit decomposition as a convex sum of processes compatible with a definite causal order, in the form

with

where one can indeed check that  and
and  satisfy Eqs (5a)–(5c,) and (6a)–(6c,), as required (they are positive semidefinite precisely for
satisfy Eqs (5a)–(5c,) and (6a)–(6c,), as required (they are positive semidefinite precisely for  ).
).
Figure 3 represents the set of process matrices  . We recover here the results found in ref. 18; however, the use of witnesses allows us to give a much more direct proof of causal (non)separability for the
. We recover here the results found in ref. 18; however, the use of witnesses allows us to give a much more direct proof of causal (non)separability for the  matrices.
matrices.
 defined in Eq. (22).
defined in Eq. (22).
The shaded circle (characterised by  ) delimits the valid process matrices
) delimits the valid process matrices  . Causally separable processes
. Causally separable processes  are restricted to the inner square (
are restricted to the inner square ( ). Causally nonseparable processes (such that
). Causally nonseparable processes (such that  ) can be witnessed by
) can be witnessed by  (23), represented (for the case η1, η2 ≥ 0) by the solid line. The figure here is similar to Fig. 2 of ref. 18.
(23), represented (for the case η1, η2 ≥ 0) by the solid line. The figure here is similar to Fig. 2 of ref. 18.
In order to measure the witness  in practice, one can for instance decompose its two nontrivial components in terms of CP (trace non-increasing) maps as follows:
in practice, one can for instance decompose its two nontrivial components in terms of CP (trace non-increasing) maps as follows:

with

(where the second part of the subscripts denotes a particular choice of instrument: a choice of ‘setting’), and then calculate, using the generalised Born rule (2),

(Note that the decomposition of a witness in terms of CP maps is not unique; another possible decomposition of  , for the case η1, η2 > 0, was given in ref. 2).
, for the case η1, η2 > 0, was given in ref. 2).
The quantum switch
The quantum switch is a circuit, which was originally proposed (independently from the framework of process matrices) to extend the framework of causally ordered quantum circuits and allow the order in which gates are performed to be coherently controlled by a quantum system4. As proven recently2,3, when analysed in the process matrix formalism, the quantum switch provides precisely an example of a (tripartite) causally nonseparable process. It is in fact the first practical example that we know how to realise physically (and which has been demonstrated experimentally20), as, to the best of our knowledge, no practical realisation is known so far for any of the causally nonseparable process matrices exhibited, e.g., in refs 1,9,18,21,22.
In its simplest version, the quantum switch involves two qubits—a control qubit and a target qubit. The target qubit, initially prepared in some state |ψ〉, is sent to two parties, Alice and Bob, who act on it in an order that is determined by the state of the control qubit: if the control qubit is in the state |0〉, then Alice acts first and Bob acts second, while if it is in the state |1〉, then Bob acts first and Alice second. The interesting situation is when the control qubit is in a superposition  , in which case Alice and Bob can be said to act ‘in a superposition of orders’. After Alice and Bob’s operations, the control qubit is sent to a third party, Charlie, who can measure it.
, in which case Alice and Bob can be said to act ‘in a superposition of orders’. After Alice and Bob’s operations, the control qubit is sent to a third party, Charlie, who can measure it.
As shown in ref. 2 (see also3), the quantum switch can be represented in terms of the ‘pure process’

where | 〉〉 = |00〉 + |11〉 is the CJ representation of an identity qubit channel, and which involves the incoming and outgoing systems AI, AO, BI and BO of Alice and Bob, the incoming system CI of Charlie, and a system TI to which the target qubit is given. After tracing out the latter, we obtain the process matrix of the quantum switch as
〉〉 = |00〉 + |11〉 is the CJ representation of an identity qubit channel, and which involves the incoming and outgoing systems AI, AO, BI and BO of Alice and Bob, the incoming system CI of Charlie, and a system TI to which the target qubit is given. After tracing out the latter, we obtain the process matrix of the quantum switch as

(Alternatively, the target qubit could also be sent for instance to Charlie, who could measure it together with the control qubit; for simplicity we do not consider this possibility here.) Note that  (with
(with  ) and that Charlie has no outgoing system, so that we are indeed in the particular tripartite case considered previously. It also appears clearly from Eq. (30) why we needed to introduce a third party in the description of the quantum switch, as tracing out CI would otherwise result in a classical mixture of two causally ordered processes (i.e., in a causally separable process).
) and that Charlie has no outgoing system, so that we are indeed in the particular tripartite case considered previously. It also appears clearly from Eq. (30) why we needed to introduce a third party in the description of the quantum switch, as tracing out CI would otherwise result in a classical mixture of two causally ordered processes (i.e., in a causally separable process).
Robustness to white noise
To investigate the causal nonseparability of the quantum switch and construct a witness, one can follow the approach described previously. We solved the SDP problems (19)–(20)—or rather, their more explicit formulation (54)–(55)—numerically with CVX19, and found that the random robustness of the quantum switch is

Alternatively, in terms of the ‘visibility’ v, this means that the noisy quantum switch

is causally nonseparable for all  . The explicit witness Sswitch obtained numerically from the dual SDP problem (20) is given in SI, Part B.1.
. The explicit witness Sswitch obtained numerically from the dual SDP problem (20) is given in SI, Part B.1.
Depolarising the control qubit
In a practical implementation of the quantum switch, other noise models than fully white noise can also be relevant.
Consider for instance a situation where, for practical reasons, the target qubit is well preserved throughout the setup, but the control qubit is affected by white noise: with some probability v (which can be understood as a ‘visibility’), the state of the control qubit is untouched, and with some probability 1 − v it is depolarised to the fully fixed state  . The resulting noisy process then writes
. The resulting noisy process then writes

with

which corresponds to a random mixture of a process where the target qubit goes first to Alice then to Bob, and a process where it goes first to Bob and then to Alice.
One clearly sees that Wdepol is causally separable. As it turns out, it lies precisely on the boundary of the set of causally separable processes; hence, some care needs to be taken if one wants to investigate the causal (non)separability of  as discussed on page 6. A possible approach is for instance to mix the quantum switch with a process that is
as discussed on page 6. A possible approach is for instance to mix the quantum switch with a process that is  -close to
-close to  (and let
(and let  ), inside the relative interior of
), inside the relative interior of  ; or to directly calculate the random robustness of
; or to directly calculate the random robustness of  for various fixed values of v.
for various fixed values of v.
By doing so, we found numerically a positive random robustness for all chosen values v > 0. In fact, one can prove analytically that  is causally nonseparable whenever v > 0, by constructing a family of witnesses S(v) such that
is causally nonseparable whenever v > 0, by constructing a family of witnesses S(v) such that  for all v > 0; see SI, Part B.2. That is, the causal nonseparability of the quantum switch is infinitely robust to white noise affecting the control qubit only.
for all v > 0; see SI, Part B.2. That is, the causal nonseparability of the quantum switch is infinitely robust to white noise affecting the control qubit only.
Figure 4 shows, for illustration, the two-dimensional slice of the space of process matrices that contains Wswitch, Wdepol and  . By scanning this whole slice, one can characterise using our SDP technique the limits of the set of causally separable processes. One can clearly see for instance that the whole line segment containing the processes
. By scanning this whole slice, one can characterise using our SDP technique the limits of the set of causally separable processes. One can clearly see for instance that the whole line segment containing the processes  with v > 0 is outside of it, and approaches it tangentially.
with v > 0 is outside of it, and approaches it tangentially.
 .
.
The shaded region contains all valid (positive semidefinite) process matrices, with the inner darker region containing the causally separable processes. The causal nonseparability of Wswitch can be witnessed using Sswitch, given explicitly in SI, Part B.1, which is optimal to test its robustness to white noise. All processes  with 0 < v ≤ 1 are causally nonseparable, as can be shown using a family of witnesses given in SI, Part B.2. The witness
with 0 < v ≤ 1 are causally nonseparable, as can be shown using a family of witnesses given in SI, Part B.2. The witness  can be measured with Alice and Bob restricting their operations to unitaries; only the causally nonseparable processes outside of the hatched region can be witnessed with this restriction.
can be measured with Alice and Bob restricting their operations to unitaries; only the causally nonseparable processes outside of the hatched region can be witnessed with this restriction.
Dephasing the control qubit
Rather than fully depolarising the control qubit, it may be relevant to investigate the case where it is only dephased, i.e. it undergoes (with some probability 1 − v, as before) the map

so that its coherence is lost.
We are thus led to consider here the noisy process

with

which corresponds now to a situation where a classical control bit, in the state  or
or  with equal probability, determines the order between Alice and Bob—a process that we could call a classical switch.
with equal probability, determines the order between Alice and Bob—a process that we could call a classical switch.
Clearly, Wdeph is causally separable. Like Wdepol, it also lies on the boundary of the set of causally separable processes. One can again check numerically and prove analytically (see SI, Part B.2) that  is causally nonseparable for all v > 0: that is, the quantum switch is also infinitely robust to dephasing noise affecting the control qubit only. As with Figs 4 and 5 now shows, for illustration, the two-dimensional slice of the space of process matrices that contains Wswitch, Wdeph and
is causally nonseparable for all v > 0: that is, the quantum switch is also infinitely robust to dephasing noise affecting the control qubit only. As with Figs 4 and 5 now shows, for illustration, the two-dimensional slice of the space of process matrices that contains Wswitch, Wdeph and  .
.
 .
.
The process  , symmetric to Wswitch, is the process obtained when implementing the quantum switch with a control qubit initially in the state
, symmetric to Wswitch, is the process obtained when implementing the quantum switch with a control qubit initially in the state  rather than
rather than  (whose description as a process matrix is then obtained by replacing the ‘+’ sign by a ‘−’ sign in Eq. (30)).
(whose description as a process matrix is then obtained by replacing the ‘+’ sign by a ‘−’ sign in Eq. (30)).
Restricting Alice and Bob’s operations to unitaries
To finish with, let us consider an implementation of the quantum switch where Alice and Bob are restricted to perform unitary operations. This restriction is motivated by practical reasons: in the recent photonic implementation of the quantum switch reported in ref. 20 for example, Alice and Bob only used passive optical elements, namely half and quarter wave plates, realising (up to experimental imperfections) unitaries on the target qubit, encoded in the photon polarisation. In particular, Alice and Bob do not perform any actual measurement, and do not need to record measurement outcomes (only Charlie makes a measurement with different possible outcomes).
As we show in SI, Part B.3, the CJ representation  of a unitary operation
of a unitary operation  satisfies
satisfies

Now, if Alice and Bob are restricted to perform unitary operations, the witnesses that can be measured must be of the form

for some unitaries Ux, Uy, for some CP maps (or simply: POVM elements)  , and some real coefficients γx,y,z,c. Because of (39), S will then necessarily satisfy
, and some real coefficients γx,y,z,c. Because of (39), S will then necessarily satisfy

and

Hence, to construct such a witness, one can simply solve the dual SDP problem (20), replacing the constraint  by
by  and Eq. (53). The resulting optimisation problem remains a SDP problem. Solving it with CVX, we obtained numerically an explicit witness
and Eq. (53). The resulting optimisation problem remains a SDP problem. Solving it with CVX, we obtained numerically an explicit witness  , given in SI, Part B.3 and shown on Figs 4 and 5, that detects the causal nonseparability of the processes
, given in SI, Part B.3 and shown on Figs 4 and 5, that detects the causal nonseparability of the processes  (33),
(33),  (34) and
(34) and  (37) down to v ≃ 0.6641 (the same value for all three).
(37) down to v ≃ 0.6641 (the same value for all three).
Clearly, the price to pay by restricting Alice and Bob to unitaries only is that not all causally nonseparable processes can be witnessed; see the hatched regions in Figs 4 and 5. Nevertheless, the amount of noise tolerated by  is already good enough to measure it and demonstrate causal nonseparability experimentally with current technologies, e.g. in a setup similar to that of ref. 20.
is already good enough to measure it and demonstrate causal nonseparability experimentally with current technologies, e.g. in a setup similar to that of ref. 20.
Discussion
In this paper we have given an introduction to witnesses of causal nonseparability2, and illustrated this concept on a few explicit examples. Witnesses of causal nonseparability are somewhat analogous to entanglement witnesses; however, a remarkable difference is that contrary to the latter, the former can be constructed efficiently, for any causally nonseparable processes (in the bipartite and particular tripartite cases considered here), using semidefinite programming.
Among the explicit examples given above, of particular interest is the quantum switch. This is indeed the first concrete example of a causally nonseparable process that we know how to realise in practice, and for which we know how to witness the causal nonseparability. We constructed its optimal witness with respect to white noise, which detects its causal nonseparability down to a visibility of v ≃ 0.3882. We further constructed a witness that can be measured with Alice and Bob implementing unitaries only, and which is robust to visibilities down to v ≃ 0.6441—whether we consider white noise, or depolarising or dephasing noise that affects the control qubit only. This allows for a feasible experimental verification of the causal nonseparability of the quantum switch that would be more robust than with the witness previously proposed in2, which allows only for visibilities down to v ≃ 0.7381 (corresponding to a success probability  for Chiribella’s task23, as reported in2). Note that in the latter, Charlie only performs measurements in the X basis (while our witness also involves the Y basis, see SI, Part B.3); as it turns out, that witness was actually optimal under this restriction, as can be shown by further adding the corresponding constraint in the dual problem (20). Recall that the witness obtained in2 was constructed from Chiribella’s task of distinguishing between a commuting and an anticommuting channel, where the quantum switch provides an advantage over any causally ordered circuit23. We note indeed that the tool of witnesses of causal nonseparability and the techniques developed to construct them may also be useful to inspire and analyse possible applications of causally nonseparable processes23,24,25, and to quantify their advantages over causally separable resources.
for Chiribella’s task23, as reported in2). Note that in the latter, Charlie only performs measurements in the X basis (while our witness also involves the Y basis, see SI, Part B.3); as it turns out, that witness was actually optimal under this restriction, as can be shown by further adding the corresponding constraint in the dual problem (20). Recall that the witness obtained in2 was constructed from Chiribella’s task of distinguishing between a commuting and an anticommuting channel, where the quantum switch provides an advantage over any causally ordered circuit23. We note indeed that the tool of witnesses of causal nonseparability and the techniques developed to construct them may also be useful to inspire and analyse possible applications of causally nonseparable processes23,24,25, and to quantify their advantages over causally separable resources.
Let us finish by emphasising that in this paper, as in ref. 2, we only considered the bipartite case and a particular tripartite case, where the third party has no (or a trivial) outgoing system. Characterising and constructing witnesses in the general case remains so far an open problem. Clearly, the sets of nonnormalised process matrices and of witnesses remain closed convex cones, and one can still write the optimisation problems (19) and (20) as conic problems. However, whether the characterisation of the cones  and
and  would allow us to write them as SDP problems that can be solved efficiently, and whether the duality relation (21) would still hold, is left for future research.
would allow us to write them as SDP problems that can be solved efficiently, and whether the duality relation (21) would still hold, is left for future research.
Methods
Characterisation of the cones Wsep, S and Sv
We recall in the Supplementary Information, Part A how to characterise the cones  of (nonnormalised) causally separable process matrices, and the cones
of (nonnormalised) causally separable process matrices, and the cones  and
and  of witnesses of causal nonseparability, in the bipartite and particular tripartite cases considered in our paper (as was done previously in2). For ease of reference we report these characterisations here; this will be useful below to give more explicit forms for our SDP problems (19) and (20). It will be implicit here that all matrices under consideration are Hermitian, either in
of witnesses of causal nonseparability, in the bipartite and particular tripartite cases considered in our paper (as was done previously in2). For ease of reference we report these characterisations here; this will be useful below to give more explicit forms for our SDP problems (19) and (20). It will be implicit here that all matrices under consideration are Hermitian, either in  or in
or in  ; we will denote by
; we will denote by  the cone of positive semidefinite matrices in either space.
the cone of positive semidefinite matrices in either space.
Bipartite case
In the bipartite case, the cone of (nonnormalised) causally separable process matrices can be characterised as

The cones  and
and  of witnesses of causal nonseparability can then be characterised as
of witnesses of causal nonseparability can then be characterised as

and

where LV is the projector onto the subspace  , defined by
, defined by

Tripartite case with 

In the particular tripartite case where Charlie has a trivial outgoing system ( ), the cone of (nonnormalised) causally separable process matrices can similarly be written as
), the cone of (nonnormalised) causally separable process matrices can similarly be written as

The cones  and
and  of witnesses of causal nonseparability can be characterised here as
of witnesses of causal nonseparability can be characterised here as

and

with the projectors  ,
,  and LV now defined by
and LV now defined by



Explicit formulation of our SDP problems
The previous characterisations of the cones  and
and  allow us to write (in our bipartite and tripartite cases) the primal and dual SDP problems (19) and (20) in more explicit forms, which can readily be implemented and solved on a computer.
allow us to write (in our bipartite and tripartite cases) the primal and dual SDP problems (19) and (20) in more explicit forms, which can readily be implemented and solved on a computer.
Bipartite case
Using the characterisation of Eq. (42), and noting that for  ,
,  is also automatically in
is also automatically in  , one can write explicitly the primal SDP problem (19) in the bipartite case as
, one can write explicitly the primal SDP problem (19) in the bipartite case as

Using now Eq. (44), the dual SDP problem (20) writes, more explicitly,

with LV defined in Eq. (45).
Tripartite case with 

Using Eq. (46), the primal SDP problem (19) can similarly be written, in the tripartite case with  , as
, as

Using now Eqs (47)–(48), the dual SDP problem (20) writes, more explicitly,

with  ,
,  and
and  defined in Eqs (49)–(51),.
defined in Eqs (49)–(51),.
Additional Information
How to cite this article: Branciard, C. Witnesses of causal nonseparability: an introduction and a few case studies. Sci. Rep. 6, 26018; doi: 10.1038/srep26018 (2016).
References
Oreshkov, O., Costa, F. & Brukner, Č. Quantum correlations with no causal order. Nat. Commun. 3, 1092 (2012).
Araújo, M. et al. Witnessing causal nonseparability. New J. Phys. 17, 102001 (2015).
Oreshkov, O. & Giarmatzi, C. Causal and causally separable processes. E-print arXiv:1506.05449 (2015).
Chiribella, G., D’Ariano, G. M., Perinotti, P. & Valiron, B. Quantum computations without definite causal structure. Phys. Rev. A 88, 022318 (2013).
Davies, E. & Lewis, J. An operational approach to quantum probability. Comm. Math. Phys. 17, 239–260 (1970).
Nielsen, M. & Chuang, I. Quantum Computation and Quantum Information (Cambridge University Press, 2000).
Gutoski, G. & Watrous, J. Toward a general theory of quantum games. In In Proceedings of 39th ACM STOC, 565–574 (2006).
Chiribella, G., D’Ariano, G. M. & Perinotti, P. Theoretical framework for quantum networks. Phys. Rev. A 80, 022339 (2009).
Baumeler, Ä. & Wolf, S. Perfect signaling among three parties violating predefined causal order. In Information Theory (ISIT), 2014 IEEE International Symposium on, 526–530 (2014).
Werner, R. F. Quantum states with einstein-podolsky-rosen correlations admitting a hidden-variable model. Phys. Rev. A 40, 4277–4281 (1989).
Barrett, J. Nonsequential positive-operator-valued measurements on entangled mixed states do not always violate a bell inequality. Phys. Rev. A 65, 042302 (2002).
Horodecki, M., Horodecki, P. & Horodecki, R. Separability of mixed states: necessary and sufficient conditions. Phys. Lett. A 223, 1–8 (1996).
Terhal, B. M. Bell inequalities and the separability criterion. Phys. Lett. A 271, 319–326 (2000).
Rockafellar, R. T. Convex Analysis (Princeton University Press, 1970).
Nesterov, Y. & Nemirovskii, A. Interior Point Polynomial Algorithms in Convex Programming. Studies in Applied Mathematics (Society for Industrial and Applied Mathematics, 1987).
Vidal, G. & Tarrach, R. Robustness of entanglement. Phys. Rev. A 59, 141 (1999).
Steiner, M. Generalized robustness of entanglement. Phys. Rev. A 67, 054305 (2003).
Brukner, Č. Bounding quantum correlations with indefinite causal order. New J. Phys. 17, 083034 (2015).
Grant, M. & Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, version 2.1. CVX Research, Inc. URL http://cvxr.com/cvx/ (2014).
Procopio, L. M. et al. Experimental superposition of orders of quantum gates. Nat. Commun. 6, 7913 (2015).
Baumeler, Ä., Feix, A. & Wolf, S. Maximal incompatibility of locally classical behavior and global causal order in multi-party scenarios. Phys. Rev. A 90, 042106 (2014).
Branciard, C., Araújo, M., Feix, A., Costa, F. & Brukner, Č. The simplest causal inequalities and their violation. New J. Phys. 18, 013008 (2016).
Chiribella, G. Perfect discrimination of no-signalling channels via quantum superposition of causal structures. Phys. Rev. A 86, 040301 (2012).
Araújo, M., Costa, F. & Brukner, Č. Computational Advantage from Quantum-Controlled Ordering of Gates. Phys. Rev. Lett. 113, 250402 (2014).
Feix, A., Araújo, M. & Brukner, Č. Quantum superposition of the order of parties as a communication resource. Phys. Rev. A 92, 052326 (2015).
Acknowledgements
I acknowledge fruitful discussions with all my co-authors of ref. 2 and feedback on this manuscript from Alastair Abbott. This work was funded by the ‘Retour Post-Doctorants’ program (ANR-13-PDOC-0026) of the French National Research Agency and by a Marie Curie International Incoming Fellowship (PIIF-GA-2013-623456) of the European Commission.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The author declares no competing financial interests.
Supplementary information
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Branciard, C. Witnesses of causal nonseparability: an introduction and a few case studies. Sci Rep 6, 26018 (2016). https://doi.org/10.1038/srep26018
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep26018
This article is cited by
-
Cyclic quantum causal models
Nature Communications (2021)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
