
Abstract
Continuous time quantum walks provide an important framework for designing new algorithms and modelling quantum transport and state transfer problems. Often, the graph representing the structure of a problem contains certain symmetries that confine the dynamics to a smaller subspace of the full Hilbert space. In this work, we use invariant subspace methods, that can be computed systematically using the Lanczos algorithm, to obtain the reduced set of states that encompass the dynamics of the problem at hand without the specific knowledge of underlying symmetries. First, we apply this method to obtain new instances of graphs where the spatial quantum search algorithm is optimal: complete graphs with broken links and complete bipartite graphs, in particular, the star graph. These examples show that regularity and high-connectivity are not needed to achieve optimal spatial search. We also show that this method considerably simplifies the calculation of quantum transport efficiencies. Furthermore, we observe improved efficiencies by removing a few links from highly symmetric graphs. Finally, we show that this reduction method also allows us to obtain an upper bound for the fidelity of a single qubit transfer on an XY spin network.
Similar content being viewed by others

Introduction
Quantum walks1,2,3,4,5,6,7 are an important framework to model quantum dynamics, with applications ranging from quantum computation to quantum transport. Being the quantum mechanical analogue of classical random walks, quantum walks can outperform their classical counterparts by exploiting interference in the superposition of the various paths in a graph as well as by taking advantage of quantum correlations and quantum particle statistics between multiple walkers8. In fact, for multiparticle quantum walks, interactions lead to an efficient simulation of the circuit model of quantum computation9.
Quantum walks can be formulated in both the discrete time1 and continuous time2 frameworks, where the latter can be obtained as a limit of the former10. In this article we focus on single particle continuous time quantum walks (CTQWs), where the knowledge of the adjacency matrix of the graph is sufficient to completely describe the walk. Several interesting algorithms have been developed in this framework11,12. In fact, CTQWs in sparse unweighted graphs are equivalent to the circuit model of quantum computation, although the corresponding simulation is not efficient13. Besides quantum algorithms, CTQWs are applied in areas such as quantum transport14,15,16,17 and state transfer18,19.
In most CTQW problems, the quantity of interest is the population (or probability amplitude) at a particular node of the graph. For example, in the spatial search algorithm11, the purpose is to maximize the probability amplitude at the solution node in the shortest possible time. In the glued trees algorithm demonstrated in12, which has an exponential speed up over its classical counterpart, the walker traverses the graph therein in order to find an exit node. On the other hand, quantum transport problems involving a single excitation, for example, exciton transport in photosynthetic complexes, can be modelled by CTQWs14,15,16,17,20. In such cases, the figures of merits are typically the transport efficiency or the transfer time to a special node, known as the trap. As for state transfer, the task is to send a qubit from one point of a spin-network to another with maximum fidelity18,19,21. In many of these problems, the graph in which the walk takes place possesses some symmetry11,22,23 which implies that the dynamics of the walker is restricted to a subspace that is smaller than the complete Hilbert space spanned by the nodes of the graph. In this work, we use invariant subspace methods, that can be computed systematically using the Lanczos algorithm24, to obtain a reduced model that fully describes the evolution of the probability amplitude at the node we are interested in. This method involves obtaining the minimal subspace which contains this node and is invariant under the unitary evolution. This is simply the subspace that contains the node of interest  and all powers of the Hamiltonian applied to it, also known as a Krylov subspace. Henceforth, this subspace will be denoted by
and all powers of the Hamiltonian applied to it, also known as a Krylov subspace. Henceforth, this subspace will be denoted by  . This subspace can be systematically obtained without taking into consideration the symmetries of the Hamiltonian, using, for example, the Lanczos algorithm24. This algorithm iteratively obtains the basis for the invariant subspace: the first basis element is the special node
. This subspace can be systematically obtained without taking into consideration the symmetries of the Hamiltonian, using, for example, the Lanczos algorithm24. This algorithm iteratively obtains the basis for the invariant subspace: the first basis element is the special node  ; the ith basis element is calculated by applying the Hamiltonian to the (i − 1)th element and orthonormalizing with respect to the previous basis elements. When expressed in the Lanczos basis, any Hermitian matrix becomes a tridiagonal matrix. Thus, any problem in quantum mechanics wherein the dynamics is described by a time independent Hamiltonian can be mapped to a CTQW on a weighted line, where the nodes are the elements of the Lanczos basis. In this way, we explore the notion of invariant subspaces to systematically reduce the dimension of the Hamiltonian that completely describes the dynamics relevant to our problem. We use this method to obtain new results on several CTQW problems, as well as re-derive some other known results in a simpler manner.
; the ith basis element is calculated by applying the Hamiltonian to the (i − 1)th element and orthonormalizing with respect to the previous basis elements. When expressed in the Lanczos basis, any Hermitian matrix becomes a tridiagonal matrix. Thus, any problem in quantum mechanics wherein the dynamics is described by a time independent Hamiltonian can be mapped to a CTQW on a weighted line, where the nodes are the elements of the Lanczos basis. In this way, we explore the notion of invariant subspaces to systematically reduce the dimension of the Hamiltonian that completely describes the dynamics relevant to our problem. We use this method to obtain new results on several CTQW problems, as well as re-derive some other known results in a simpler manner.
First, we consider the spatial search algorithm11, which searches for an element contained in one of the N nodes of the graph in  time, which is optimal23. This algorithm is known to hold optimally for structures such as the complete graph, hypercubes, lattices of dimension greater than four and more recently, for strongly regular graphs22. In two dimensional lattices, the lower bound of
time, which is optimal23. This algorithm is known to hold optimally for structures such as the complete graph, hypercubes, lattices of dimension greater than four and more recently, for strongly regular graphs22. In two dimensional lattices, the lower bound of  could only be achieved when the dispersion relation of the spectrum is linear at a certain energy, i.e., it contains a Dirac point, as in honeycomb (e.g. graphene) lattices25 and crystal lattices26. However, the characteristics that a graph must possess, in general, for this algorithm to run optimally remains an open question. In fact in27, where the authors present a different spatial search algorithm based on the divide and conquer approach, their main criticism towards the CTQW version of the spatial search was the fact that an upper bound on the running time is unknown even if “minor defects are introduced”. Here, we show that the algorithm runs optimally on the complete graph with imperfections in the form of broken links and also for complete bipartite graphs (CBG). In both cases, the graphs are, in general non-regular, i.e. not all the nodes of the graph have the same degree. A particular case of the CBG is the star graph where N − 1 nodes are connected only to a central node, which is a planar structure with link connectivity one. Thus, this example shows that high connectivity is not a requirement for optimal quantum search. Moreover, on removing k links, such that
could only be achieved when the dispersion relation of the spectrum is linear at a certain energy, i.e., it contains a Dirac point, as in honeycomb (e.g. graphene) lattices25 and crystal lattices26. However, the characteristics that a graph must possess, in general, for this algorithm to run optimally remains an open question. In fact in27, where the authors present a different spatial search algorithm based on the divide and conquer approach, their main criticism towards the CTQW version of the spatial search was the fact that an upper bound on the running time is unknown even if “minor defects are introduced”. Here, we show that the algorithm runs optimally on the complete graph with imperfections in the form of broken links and also for complete bipartite graphs (CBG). In both cases, the graphs are, in general non-regular, i.e. not all the nodes of the graph have the same degree. A particular case of the CBG is the star graph where N − 1 nodes are connected only to a central node, which is a planar structure with link connectivity one. Thus, this example shows that high connectivity is not a requirement for optimal quantum search. Moreover, on removing k links, such that  , from a star graph, the emerging graph is robust as it preserves its star connectivity and search is still optimal provided that the broken link does not contain the solution. In all the graphs mentioned thus far, the Hamiltonian of dimension N, describing the dynamics of the algorithm, can be reduced to a Hamiltonian of dimension at most four. The dynamics, driven by this reduced Hamiltonian, can be viewed as a CTQW on a smaller graph, which provides an intuitive picture of the algorithm, similar to a quantum transport problem. It is worth noting that the reduced Hamiltonians presented here describe the dynamics of the problem exactly and are not obtained by approximating the search Hamiltonian at the avoided crossing as in25. Thus, this is a simple way to analyse the algorithm that, in some cases, allows us to understand why search is optimal in a certain graph without having to explicitly calculate the eigenstates of the Hamiltonian.
, from a star graph, the emerging graph is robust as it preserves its star connectivity and search is still optimal provided that the broken link does not contain the solution. In all the graphs mentioned thus far, the Hamiltonian of dimension N, describing the dynamics of the algorithm, can be reduced to a Hamiltonian of dimension at most four. The dynamics, driven by this reduced Hamiltonian, can be viewed as a CTQW on a smaller graph, which provides an intuitive picture of the algorithm, similar to a quantum transport problem. It is worth noting that the reduced Hamiltonians presented here describe the dynamics of the problem exactly and are not obtained by approximating the search Hamiltonian at the avoided crossing as in25. Thus, this is a simple way to analyse the algorithm that, in some cases, allows us to understand why search is optimal in a certain graph without having to explicitly calculate the eigenstates of the Hamiltonian.
Furthermore, we consider quantum transport on a graph, where an exciton is to be transferred from one node to a special node where it gets absorbed, known as the trap15,17. In the scenario where there is no disorder, decoherence or losses, it was shown in17 that the transport efficiency is given by the overlap of the initial condition with the eigenstates having a non-zero overlap with the trap. We prove that this subspace is the same as the invariant subspace  . This observation allows us to compute transport efficiencies without having to diagonalize the Hamiltonian. We calculate the efficiency in the complete graph (CG) with this method (obtaining the same result as in17, which uses the eigenstates of the graph). Furthermore, we obtain the transport efficiency on binary trees and hypercubes as a function of the number of generations and dimension respectively, for various initial conditions. Finally, we show that the efficiency in all these structures increases on average, when a few links are broken randomly from the graph. A particularly interesting example is the one of breaking the link from the complete graph which connects the initial and trap nodes. In such a case, the efficiency increases to 1, in the absence of decoherence and losses, irrespective of the size of the network. For this case, we also calculate analytically the trapping time, which does not depend on N. This counter-intuitive result can be interpreted by looking at the reduced subspace of the graph, where the problem reduces to an end to end transport in a line of three nodes. Similar results were obtained in21, in the context of state transfer, although different methods were used for the analysis of the problem. Overall, the instances presented herein show that even small perturbations to the symmetry of a structure lead to a drastic improvement of the transport efficiency in the absence of decoherence. When decoherence is present, the effect of geometry in the transport efficiency was numerically studied in28, for random disordered structures.
. This observation allows us to compute transport efficiencies without having to diagonalize the Hamiltonian. We calculate the efficiency in the complete graph (CG) with this method (obtaining the same result as in17, which uses the eigenstates of the graph). Furthermore, we obtain the transport efficiency on binary trees and hypercubes as a function of the number of generations and dimension respectively, for various initial conditions. Finally, we show that the efficiency in all these structures increases on average, when a few links are broken randomly from the graph. A particularly interesting example is the one of breaking the link from the complete graph which connects the initial and trap nodes. In such a case, the efficiency increases to 1, in the absence of decoherence and losses, irrespective of the size of the network. For this case, we also calculate analytically the trapping time, which does not depend on N. This counter-intuitive result can be interpreted by looking at the reduced subspace of the graph, where the problem reduces to an end to end transport in a line of three nodes. Similar results were obtained in21, in the context of state transfer, although different methods were used for the analysis of the problem. Overall, the instances presented herein show that even small perturbations to the symmetry of a structure lead to a drastic improvement of the transport efficiency in the absence of decoherence. When decoherence is present, the effect of geometry in the transport efficiency was numerically studied in28, for random disordered structures.
Finally, we connect the results obtained for transport to the problem of state transfer in a quantum network. In the single excitation framework, the state transfer problem is equivalent to a CTQW of a single particle. We show that the fidelity of transferring an excitation from one node of the network i to another node j, is upper bounded by the square root of the transport efficiency in the analogous transport problem wherein i is the initial state and j is the trap node. This gives a simple way to upper bound the fidelity of transferring a qubit in any spin network.
Overall, we demonstrate that dimensionality reduction using the notion of invariant subspaces can be a useful tool to analyse CTQW based problems. By mapping a QW problem on a graph to one on a much smaller structure, the analysis of the problem becomes easier and the dynamics of the walk can be intuitively understood. Krylov subspace methods and the Lanczos algorithm for the analysis of CTQWs have also been used in29, but different results were obtained therein. In the discrete time framework, the role of symmetry and invariant subspaces were studied in30,31. Krylov subspace approaches were used to analyse adiabatic quantum search on structured database in32 and to obtain bounds for information propagation on lattices in33. The notion of invariant subspaces is also exploited in34 to simplify the analysis of parametrized Hamiltonians of quantum many body systems.
This paper is structured as follows: In Sec. Methods, the systematic method to obtain the reduced subspace  is demonstrated. Sec. Results comprises of the various applications of the reduction method, namely in quantum spatial search, quantum transport and state transfer. Finally, we present our conclusions in Sec. Discussions.
is demonstrated. Sec. Results comprises of the various applications of the reduction method, namely in quantum spatial search, quantum transport and state transfer. Finally, we present our conclusions in Sec. Discussions.
Methods
Dimensionality reduction of continuous time quantum walks
Let us consider a graph G(V, E) of N nodes, where V is the set of nodes and E, the set of links. The adjacency matrix A of G(V, E) is of dimension N × N and is defined as follows:

Formally, a CTQW on the graph G(V, E) takes place on a Hilbert space  of dimension N that is spanned by the nodes of the graph
of dimension N that is spanned by the nodes of the graph  with I ∈ V. A particle starting in a state
with I ∈ V. A particle starting in a state  evolves according to the Schrödinger equation where the Hamiltonian H that governs the system dynamics is the adjacency matrix, i.e., H = A. After time t, the particle is in the state
evolves according to the Schrödinger equation where the Hamiltonian H that governs the system dynamics is the adjacency matrix, i.e., H = A. After time t, the particle is in the state

and the probability that the walker is in node v is given by  . The unitary evolution of the state
. The unitary evolution of the state  can be expressed as
can be expressed as

So  is contained in the subspace
is contained in the subspace  . This subspace of
. This subspace of  is invariant under the action of the Hamiltonian and thus also of the unitary evolution. Trivially, the dimension of this subspace is at most N. However, if the Hamiltonian is highly symmetrical, only a small number of powers of
is invariant under the action of the Hamiltonian and thus also of the unitary evolution. Trivially, the dimension of this subspace is at most N. However, if the Hamiltonian is highly symmetrical, only a small number of powers of  are linearly independent and the dimension of
are linearly independent and the dimension of  can be much smaller than N. Thus, we can reduce the dimension of the problem in the following way. Let P be the projector onto
can be much smaller than N. Thus, we can reduce the dimension of the problem in the following way. Let P be the projector onto  . Then
. Then

where Hred = PHP is the reduced Hamiltonian. In the derivation we used the fact that P2 = P,  and
and  . Now, for any state
. Now, for any state  , we have
, we have


where, the reduced state,  . The same reasoning could be applied using the projector P′ onto the subspace
. The same reasoning could be applied using the projector P′ onto the subspace  , in which case we obtain
, in which case we obtain

with  and
and  . This way, a reduced Hamiltonian can be obtained which can be seen as the Hamiltonian of a weighted graph that in some cases, can be much simpler than the original graph we started with. Here,
. This way, a reduced Hamiltonian can be obtained which can be seen as the Hamiltonian of a weighted graph that in some cases, can be much simpler than the original graph we started with. Here,  can be the solution node for search algorithms, the trap for quantum transport and the target node for state transfer problems (see Sec. Results).
can be the solution node for search algorithms, the trap for quantum transport and the target node for state transfer problems (see Sec. Results).
A systematic way to calculate an orthonormal basis of  is given by the Lanczos algorithm24. This basis, which we denote by
is given by the Lanczos algorithm24. This basis, which we denote by  , can be obtained as follows: the first element is
, can be obtained as follows: the first element is  ; the kth element
; the kth element  is obtained by orthonormalizing
is obtained by orthonormalizing  with respect to the subspace spanned by
with respect to the subspace spanned by  . The procedure stops when we find the minimum m such that
. The procedure stops when we find the minimum m such that  . It can be shown that H projected in this basis has a tridiagonal form:
. It can be shown that H projected in this basis has a tridiagonal form:

This implies that, in fact, any problem in quantum mechanics with a time independent Hamiltonian can be mapped to an equivalent problem governed by a tight-binding Hamiltonian of a line with m sites, with site energies Ei and couplings Vi.
To illustrate the reduction method, we give a simple example of the quantum walk on the complete graph of N nodes, a graph wherein every node is connected to every other node, as shown in Fig. 1a. The Hamiltonian is given by the adjacency matrix of the graph

(a) A complete graph with 7 nodes, with the target node in red. (b) Line with two nodes representing the reduced Hamiltonian of the complete graph with N nodes (see Eq. (13)), The solution node  is represented in red and the other node
is represented in red and the other node  represents the equal superposition of all nodes except
represents the equal superposition of all nodes except  . E1 and E2 represent their respective site energies and V the coupling between them. (c) The search Hamiltonian in the reduced picture (see Eq. (15)). In contrast to Fig. 1b, the site energies of both the nodes are equal, leading to perfect transport between them. Also, the transport time is given by the inverse of the coupling, which yields the running time of the algorithm
. E1 and E2 represent their respective site energies and V the coupling between them. (c) The search Hamiltonian in the reduced picture (see Eq. (15)). In contrast to Fig. 1b, the site energies of both the nodes are equal, leading to perfect transport between them. Also, the transport time is given by the inverse of the coupling, which yields the running time of the algorithm  .
.

In this case, if |w〉 is a node of the graph, we have that

where we define the equal superposition of all nodes except  as
as

Furthermore,

It is easy to see now that any state  can be written as a linear combination of
can be written as a linear combination of  and
and  . Thus, to calculate
. Thus, to calculate  , it is enough to consider the dynamics in this two dimensional subspace spanned by
, it is enough to consider the dynamics in this two dimensional subspace spanned by  driven by the reduced Hamiltonian
driven by the reduced Hamiltonian

This approach reduces the problem of calculating  to the calculation of the exponential of a 2 × 2 matrix instead of a N × N matrix. We can see Hred as a tight-binding Hamiltonian of a structure with two sites
to the calculation of the exponential of a 2 × 2 matrix instead of a N × N matrix. We can see Hred as a tight-binding Hamiltonian of a structure with two sites  and
and  , with site energies 0 and N − 2, respectively and a coupling of
, with site energies 0 and N − 2, respectively and a coupling of  , as shown in Fig. 1b. Another interesting example is the reduction of the quantum walk on the glued trees of height l with
, as shown in Fig. 1b. Another interesting example is the reduction of the quantum walk on the glued trees of height l with  nodes to the 2l + 1 column states as done in12, which is crucial to prove the exponential speed-up of this algorithm with respect to its classical counterpart. Even when some symmetry of the graph is broken, say by breaking a link of the graph, this reduction is still very useful and captures the symmetry that remains (see Sec. Results).
nodes to the 2l + 1 column states as done in12, which is crucial to prove the exponential speed-up of this algorithm with respect to its classical counterpart. Even when some symmetry of the graph is broken, say by breaking a link of the graph, this reduction is still very useful and captures the symmetry that remains (see Sec. Results).
This reduction method can also be used in the context of quantum transport. In fact, in the Supplementary Information, we show that  is equal to the subspace spanned by the eigenstates of the Hamiltonian which have a non-zero overlap with
is equal to the subspace spanned by the eigenstates of the Hamiltonian which have a non-zero overlap with  . This subspace is referred to as the ‘non-invariant subspace’ in17 where
. This subspace is referred to as the ‘non-invariant subspace’ in17 where  is the trapping site. Let us denote this subspace as
is the trapping site. Let us denote this subspace as  . The calculation of
. The calculation of  is important for computing the transport efficiency in various networks, in the absence of interaction with the environment. The Lanczos method provides a simpler way to calculate this subspace which eliminates the need to compute the eigenstates of the full Hamiltonian. This way, it also enables us to efficiently analyse the effects of perturbing the symmetry of networks in transport dynamics, as described in Subsec. Applications to Quantum Transport of Results.
is important for computing the transport efficiency in various networks, in the absence of interaction with the environment. The Lanczos method provides a simpler way to calculate this subspace which eliminates the need to compute the eigenstates of the full Hamiltonian. This way, it also enables us to efficiently analyse the effects of perturbing the symmetry of networks in transport dynamics, as described in Subsec. Applications to Quantum Transport of Results.
In the following section, we use this method to analyse spatial search in highly symmetric graphs, calculate efficiency of transport in several structures and obtain bounds on the fidelity of single qubit state transfer in spin networks.
Results
Applications to spatial search
The goal of the spatial search algorithm in the CTQW formalism is to find a marked basis state  11,22 and proceeds by evolution of the initial state
11,22 and proceeds by evolution of the initial state  , according to the Hamiltonian
, according to the Hamiltonian

where A is the adjacency matrix of G and γ is the coupling between connected nodes that is tuned so as to run the algorithm optimally. As described in Sec. Methods, the Hamiltonian of a complete graph can be reduced to a two dimensional subspace, which can be seen as a line with two nodes. The reduced Hamiltonian is given by

and is depicted in Fig. 1c. The optimal value of γ is proven to be 1/N such that the dynamics is simply a rotation between  and
and  11. This value is optimal because it ensures that the site energies of both the nodes
11. This value is optimal because it ensures that the site energies of both the nodes  and
and  are equal, thus optimizing transport between these nodes. The initial state is approximately
are equal, thus optimizing transport between these nodes. The initial state is approximately  so the probability amplitude at
so the probability amplitude at  becomes approximately 1 after a time that is of the order of the inverse of the coupling. Hence, the running time of the algorithm is
becomes approximately 1 after a time that is of the order of the inverse of the coupling. Hence, the running time of the algorithm is  . Here, we give examples of non-regular graphs where the algorithm runs optimally, by making use of the reduction method explained in Sec. Methods. First, we analyse the effect of breaking links from this graph and show that the optimal running time is maintained. This can be interpreted as an inherent robustness of the algorithm to imperfections of this form. Furthermore, we prove that the spatial search algorithm also runs optimally for complete bipartite graphs.
. Here, we give examples of non-regular graphs where the algorithm runs optimally, by making use of the reduction method explained in Sec. Methods. First, we analyse the effect of breaking links from this graph and show that the optimal running time is maintained. This can be interpreted as an inherent robustness of the algorithm to imperfections of this form. Furthermore, we prove that the spatial search algorithm also runs optimally for complete bipartite graphs.
Optimal spatial search on complete graphs with broken links
Here, we consider the case of breaking k links from a complete graph and show analytically that the optimality of the algorithm is maintained. We assume that at most one link is removed per node and hence

In this scenario, there exist two cases that require separate analytical treatment, namely one where none of the broken k links were connected to the solution state  and the other where one of the broken link was connected to
and the other where one of the broken link was connected to  . We analyse the former in this section while the latter is explained in the Supplementary Information.
. We analyse the former in this section while the latter is explained in the Supplementary Information.
Let us consider that the links broken correspond to the set  , that is, at most one link is removed from each node, as shown in Fig. 2a. Also, let
, that is, at most one link is removed from each node, as shown in Fig. 2a. Also, let  be the set of nodes comprising of the broken links. The graphs obtained by breaking links from a complete graph are not regular and hence violates the requirement for regularity in networks in order to achieve a quadratic speed up. Applying the Lanczos algorithm, we obtain the reduced basis
be the set of nodes comprising of the broken links. The graphs obtained by breaking links from a complete graph are not regular and hence violates the requirement for regularity in networks in order to achieve a quadratic speed up. Applying the Lanczos algorithm, we obtain the reduced basis  , where
, where  is defined as
is defined as

(a) Complete graph with 7 nodes and 3 broken links (dashed links). No more than one link per node is broken. (b) Representation of the reduced search Hamiltonian for the complete graph with N nodes and k broken links where at most one link is broken per node. The coupling V2 to the third node  is much weaker than the coupling V1 and can be neglected. Thus, the dynamics is the same as in Fig. 1c.
is much weaker than the coupling V1 and can be neglected. Thus, the dynamics is the same as in Fig. 1c.

i.e., the equal superposition of all nodes of the graph except the solution and thus  .
.  is a state that is orthogonal to both
is a state that is orthogonal to both  and
and  and is constructed as,
and is constructed as,

where  and
and  .
.
Also, let k = αN such that  , and,
, and,  . Thus, for large N, the search Hamiltonian in this basis is,
. Thus, for large N, the search Hamiltonian in this basis is,

We shall use degenerate perturbation theory to estimate the running time of the algorithm in this scenario22. We write, Hsearch = H(0) + H(1) + H(2) with



such that H(0) has terms of  , H(1) has terms of order
, H(1) has terms of order  while H(2) contains
while H(2) contains  terms (see Fig. 2b). H(0) has eigenstates
terms (see Fig. 2b). H(0) has eigenstates  and
and  with eigenvalues −1 and −γN respectively and thus, in order for the dynamics to rotate between
with eigenvalues −1 and −γN respectively and thus, in order for the dynamics to rotate between  (which is approximately
(which is approximately  for large N) and the solution state
for large N) and the solution state  , the eigenvalues must be degenerate, making
, the eigenvalues must be degenerate, making  . The eigenstates of the perturbed Hamiltonian are
. The eigenstates of the perturbed Hamiltonian are  having eigenvalues
having eigenvalues  . This gives the running time of the algorithm to be
. This gives the running time of the algorithm to be

thereby preserving the optimal quadratic speed up.
This result can be perceived as an inherent robustness of the algorithm to imperfections in the form of broken links. One could argue that this robustness has to do with the high connectivity of the structure. However, in the following subsection, we give the example of the star graph, a structure with low connectivity where the algorithm runs optimally that is also robust to broken links. Also, in the context of quantum transport, we show that breaking a link from the complete graph can affect severely the dynamics if one starts with a localized initial state.
Optimal spatial search on complete bipartite graphs
Another example of a highly symmetrical structure, that is in general non-regular, is the complete bipartite graph (CBG). Here, we show that spatial search is optimal for this class of graphs. A complete bipartite graph G(V1, V2, E) has two sets of vertices V1 and V2 such that each vertex of V1 is only connected to all vertices of V2 and vice-versa. This set of graphs is also denoted as  , where
, where  and
and  and we have m1 + m2 = N. This is a non-regular graph, as long as m1 ≠ m2. The complete bipartite graph K4,3 is shown in Fig. 3a. Quantum search was also analysed in these graphs in the formalism of discrete-time scattering quantum walks in31. However, in that framework, the algorithm does not run optimally if
and we have m1 + m2 = N. This is a non-regular graph, as long as m1 ≠ m2. The complete bipartite graph K4,3 is shown in Fig. 3a. Quantum search was also analysed in these graphs in the formalism of discrete-time scattering quantum walks in31. However, in that framework, the algorithm does not run optimally if  . In this case, although each run of the algorithm takes
. In this case, although each run of the algorithm takes  time, the same must be repeated, on average, m1/m2 times to find the solution state with high probability. So, if m2 is of
time, the same must be repeated, on average, m1/m2 times to find the solution state with high probability. So, if m2 is of  , then
, then  and the total running time is linear in N.
and the total running time is linear in N.

(a) Complete bipartite graph K4,3 with the solution node  , represented in red. (b) The reduced search Hamiltonian for the complete bipartite graph
, represented in red. (b) The reduced search Hamiltonian for the complete bipartite graph  with m1 + m2 = N in the Lanczos basis.
with m1 + m2 = N in the Lanczos basis.  are the equal superposition of the nodes in partition 1 (excluding
are the equal superposition of the nodes in partition 1 (excluding  ) and 2, respectively. However, the understanding of why the search is optimal in this graph is shown in Fig. 3c. (c) The same Hamiltonian as in Fig. 3b, after a basis rotation gives us an idea as to why the algorithm works optimally. The resultant basis is
) and 2, respectively. However, the understanding of why the search is optimal in this graph is shown in Fig. 3c. (c) The same Hamiltonian as in Fig. 3b, after a basis rotation gives us an idea as to why the algorithm works optimally. The resultant basis is  ,
,  and
and  . The degeneracy between site energies of
. The degeneracy between site energies of  and
and  facilitates transport between these two nodes while transport between
facilitates transport between these two nodes while transport between  and
and  is inhibited by the energy gap between them (much larger than the coupling V2). Since there is a considerable overlap between the initial superposition of states
is inhibited by the energy gap between them (much larger than the coupling V2). Since there is a considerable overlap between the initial superposition of states  and
and  , there is a large probability amplitude at
, there is a large probability amplitude at  after a time
after a time  .
.
In our analysis, we show that the CTQW algorithm works in  time for all possible values of m1 and m2. To analyse the problem, we first assume, without loss of generality, that the solution state
time for all possible values of m1 and m2. To analyse the problem, we first assume, without loss of generality, that the solution state  belongs to the set of vertices V1 (we shall eliminate this requirement later). The subspace
belongs to the set of vertices V1 (we shall eliminate this requirement later). The subspace  is spanned by
is spanned by  ,
,  and
and  . The reduced Hamiltonian can be written as:
. The reduced Hamiltonian can be written as:

Let α = m1/N, m2 = (1 − α)N and,  . Following the procedure in the previous subsection, we calculate
. Following the procedure in the previous subsection, we calculate  , where A is the adjacency matrix of the CBG and divide it in terms of
, where A is the adjacency matrix of the CBG and divide it in terms of  and
and  with
with


This Hamiltonian can be seen as a line with three nodes as shown in Fig. 3b. In order to use perturbation theory we need to diagonalize H(0). The eigenstates of H(0) are  with eigenvalue λw = −1,
with eigenvalue λw = −1,  with eigenvalue
with eigenvalue  and
and  with eigenvalue
with eigenvalue  .
.
Since  has the largest overlap with
has the largest overlap with  , we choose
, we choose  such that
such that  and
and  form a degenerate eigenspace of H(0). The reduced search Hamiltonian in the eigenbasis of H(0), depicted in Fig. 3c, gives a clearer idea as to why the search is optimal for this graph. The matrix element responsible for the speed of the search is
form a degenerate eigenspace of H(0). The reduced search Hamiltonian in the eigenbasis of H(0), depicted in Fig. 3c, gives a clearer idea as to why the search is optimal for this graph. The matrix element responsible for the speed of the search is  . Thus, we obtain the running time:
. Thus, we obtain the running time:

However, unlike previous cases, the success of the algorithm will not be 1 since this will be given by the overlap of the initial state  with
with  . The dynamics will rotate between
. The dynamics will rotate between  and
and  , leaving
, leaving  approximately invariant. Thus, the probability of finding the solution by measuring at time T is
approximately invariant. Thus, the probability of finding the solution by measuring at time T is

We have Psuc. = 1 only if α = 1/2, in which case the graph is regular. It is important to note that one is unaware of which partition contains the solution state. The optimal measurement time depends on whether the solution node is in the partition of m1 nodes or in the partition of m2 nodes. Depending on this, the optimal measurement time would be  and
and  respectively. Thus, the strategy would be to measure interchangeably at time T1 and then at time T2 until the solution is found. Thus, in such a scenario the expected running time would be
respectively. Thus, the strategy would be to measure interchangeably at time T1 and then at time T2 until the solution is found. Thus, in such a scenario the expected running time would be  , thereby preserving the quadratic speed up. In fact, this is an upper bound for the expected running time obtained by neglecting the probability of finding the solution even on measurement at the wrong time.
, thereby preserving the quadratic speed up. In fact, this is an upper bound for the expected running time obtained by neglecting the probability of finding the solution even on measurement at the wrong time.
In the extreme case when m1 = N − 1 and m2 = 1 i.e., α = 1 − 1/N, we obtain a star graph. In this scenario, the optimal γ is given by  and the algorithm works with
and the algorithm works with  . Thus on average, we have to repeat the algorithm twice to find the solution. We discuss this case in more detail next.
. Thus on average, we have to repeat the algorithm twice to find the solution. We discuss this case in more detail next.
Optimal spatial search on the star graph
The case of the star graph is particularly interesting because it is a planar structure with node and link connectivity equal to 1. The structures for which quantum search is known to hold optimally are those with typically high connectivity (complete graphs, hypercubes). The quantum search algorithm also works with full quadratic speed-up on lattices of dimension greater than four11 and in two dimensional lattices with a Dirac point in  time25. We will focus on the case where m1 = N − 1, m2 = 1, i.e. the solution is not contained in the central node of the star graph. The case m1 = 1, m2 = N − 1, where the solution is in the central node, is trivial because the graph is biased towards the solution and by starting in state
time25. We will focus on the case where m1 = N − 1, m2 = 1, i.e. the solution is not contained in the central node of the star graph. The case m1 = 1, m2 = N − 1, where the solution is in the central node, is trivial because the graph is biased towards the solution and by starting in state  , we can measure the solution with probability ≈1, in a time T = π/2, which does not depend on N.
, we can measure the solution with probability ≈1, in a time T = π/2, which does not depend on N.
So, let the central node be denoted as  and assume
and assume  . Since this is a particular case of the CBG, Eqs (24) and (25) with α = 1 − 1/N,
. Since this is a particular case of the CBG, Eqs (24) and (25) with α = 1 − 1/N,  , yield
, yield


in the basis  . The eigenstates of H0 are
. The eigenstates of H0 are  ,
,  and
and  . In this basis we have
. In this basis we have

Using degenerate perturbation theory, we obtain the ground and first excited eigenstates.

with energies  . The running time is given by
. The running time is given by  and probability of success, for the initial state
and probability of success, for the initial state  is
is

It is interesting to note that the algorithm also works, with probability 1/2, if one starts the quantum walk at the central node  , since
, since  . This way, one avoids the cost of preparing the initial superposition of states
. This way, one avoids the cost of preparing the initial superposition of states  to run the algorithm. Furthermore, for the star graph, it is easy to analyse the robustness of the algorithm to imperfections in the graph in the form of broken links since the graph obtained after removing k links is still a star graph. We assume k links can be randomly broken so that we possess no knowledge of the links that were broken, nor of the value of k. Furthermore, we consider k constant such that
to run the algorithm. Furthermore, for the star graph, it is easy to analyse the robustness of the algorithm to imperfections in the graph in the form of broken links since the graph obtained after removing k links is still a star graph. We assume k links can be randomly broken so that we possess no knowledge of the links that were broken, nor of the value of k. Furthermore, we consider k constant such that  . We assume that the link containing the solution is not removed; this probability is
. We assume that the link containing the solution is not removed; this probability is  and therefore negligible for large N. In this scenario, the optimal value of γ is
and therefore negligible for large N. In this scenario, the optimal value of γ is  , so degenerate perturbation theory is still valid and the running time is:
, so degenerate perturbation theory is still valid and the running time is:

with success probability 1/2. Thus, quantum search on the star graph is not only optimal but also is fairly robust to defects to the structure in the form of broken links.
Applications to quantum transport
Let us consider the dynamics of an exciton in a network with N sites, governed by a tight binding Hamiltonian with nearest neighbour couplings, defined as

where εm is the site energy at site m and Vmn is the coupling between site m and n. For our analysis, we shall assume that all the site energies are uniform and thus can be set to zero, simply by an overall energy shift. Also, we assume Vmn = V, ∀m, n and choose our energy units such that V = 1. Thus, HTB is nothing but the adjacency matrix of a graph with N nodes, whose links connect nearest neighbours of the network (henceforth, we shall use sites and nodes interchangeably). We consider that in one of the nodes of the graph, there is a trap that absorbs the component of the exciton’s wave function at this node at a rate κ, known as the trapping rate. This model is motivated by the study of exciton transport in natural light harvesting systems14,15,17,20. To model the trapping dynamics, we introduce the trapping Hamiltonian:

This matrix is anti-hermitian and leads to the expected non-unitary dynamics described above. We consider as figure of merit the efficiency of transport14, defined as

which gives the probability that the exciton is absorbed at the trap integrated over time. The total Hamiltonian describing the dynamics is given by

where A is the adjacency matrix of the graph. The scenario assumed here is the ideal one, i.e, there is no disorder in the couplings or site energies of the Hamiltonian nor decoherence during the transport. In this regime, in17, the authors calculate the transport efficiency as the overlap of the initial state with the subspace spanned by the eigenstates of the Hamiltonian that have a non-zero overlap with the trap. Earlier in Sec. Methods, it was stated that this subspace is the same as the invariant subspace  , which can be obtained without diagonalizing the Hamiltonian. So the dynamics is such that the component of the initial condition within the space
, which can be obtained without diagonalizing the Hamiltonian. So the dynamics is such that the component of the initial condition within the space  is absorbed by the trap node whereas the component outside this subspace remains in the network (see proof in Supplementary Information). Thus, computing the transport efficiency boils down to finding the overlap of the initial condition with
is absorbed by the trap node whereas the component outside this subspace remains in the network (see proof in Supplementary Information). Thus, computing the transport efficiency boils down to finding the overlap of the initial condition with  .
.
In the following subsections, we give examples of how to analytically calculate transport efficiency on various structures given different initial conditions. We also analyse how transport efficiency can be improved by perturbing the symmetry of the complete graph by breaking one link. Finally, we give numerical evidence that breaking a few links in highly symmetric structures leads to the improvement of transport efficiency, if the initial state is localized at one node.
Calculation of transport efficiencies for some graphs with symmetry
Complete graph
As in Sec. Methods, we obtain that the reduced subspace for the complete graph with N nodes is given by  with
with

The reduced Hamiltonian for the transport problem is:

in the aforementioned basis. If the initial state is localized at a node  , the efficiency is given by
, the efficiency is given by

This way, we recover the result obtained in17 without the need to solve the equations of motion or requiring to find the eigenstates of the system.
Binary tree
Here we consider our graph to be a binary tree with l levels, where the number of nodes is 2l − 1. The Hamiltonian of the graph is given by:

We place the trap at the root of the tree, i.e.  . It is well known that a quantum walk on a binary tree can be reduced to the quantum walk on a line12 where each node represents a column state
. It is well known that a quantum walk on a binary tree can be reduced to the quantum walk on a line12 where each node represents a column state

These column states are readily obtained by applying the Lanczos algorithm with the root node  (we define
(we define  ) as the initial node. If the initial state of the transport problem is a state
) as the initial node. If the initial state of the transport problem is a state  localized in column j, the transport efficiency is:
localized in column j, the transport efficiency is:

Thus, we find that, in such a localized case, the efficiency decreases exponentially with the distance to the trap.
Hypercube
Another highly symmetric structure that appears frequently in the literature is the hypercube in the context of quantum computation, quantum transport and state transfer19,35,36,37. Here, we consider transport on a hypercube of dimension d with 2d sites. We label the sites of the hypercube by strings of d bits such that each site is connected to another site if they differ by a single bit flip. This way, the Hamiltonian of the graph can be written as:

where  is the Pauli matrix σx acting on the ith bit. Using symmetry arguments, it is shown in35,36 that the dynamics in this structure can be reduced to the subspace spanned by the symmetric states with k bits 1 and n − k bits 0:
is the Pauli matrix σx acting on the ith bit. Using symmetry arguments, it is shown in35,36 that the dynamics in this structure can be reduced to the subspace spanned by the symmetric states with k bits 1 and n − k bits 0:

also known as Dicke states. This is done in the context of the search problem where the solution state is assumed to be at  In this picture, the hypercube can be seen as a chain with d + 1 nodes. Here we also assume, without loss of generality, that our trap state is
In this picture, the hypercube can be seen as a chain with d + 1 nodes. Here we also assume, without loss of generality, that our trap state is  Applying the Lanczos algorithm, we also obtain that the invariant subspace,
Applying the Lanczos algorithm, we also obtain that the invariant subspace,  is spanned by the Dicke states in Eq. (45) without using any symmetry arguments. This implies that, if the initial state is localized at a site
is spanned by the Dicke states in Eq. (45) without using any symmetry arguments. This implies that, if the initial state is localized at a site  , labelled by a bit string with j bits 1, the transport efficiency to the trap is
, labelled by a bit string with j bits 1, the transport efficiency to the trap is

It is interesting to note that the efficiency is not a monotonic function of the distance from the trap.
If we consider the initial condition to be a statistical mixture of all sites we obtain the average efficiency:

reproducing analytically the numerical result of37 for transport on the hypercube of dimension 4 (in the limit of no disorder and no dephasing).
Improving transport efficiency by removing links from highly symmetric graphs
Complete graph with one broken link
For a complete graph with N nodes, the transport efficiency is given by  provided the transport begins from a localized state. We find that breaking one link from a complete graph increases the transport efficiency. In fact breaking a link that connects the starting node to the trap makes the efficiency of transport go up to 1. Let
provided the transport begins from a localized state. We find that breaking one link from a complete graph increases the transport efficiency. In fact breaking a link that connects the starting node to the trap makes the efficiency of transport go up to 1. Let  denote the trap node,
denote the trap node,  denote the starting node and
denote the starting node and  be the equal superposition of the remaining nodes. The reduced space
be the equal superposition of the remaining nodes. The reduced space  is spanned by
is spanned by  and thus,
and thus,

This is counter-intuitive, as of all the available links, breaking the link that directly connects the starting node to the trap gives the maximum efficiency. Similarly, it can be shown that removing a link between the initial node and another arbitrary node other than the trap gives η = 1/2.
The above phenomenon can be better understood by calculating the dynamics of the resultant graph. In the reduced picture, the trap is coupled to  which is in turn coupled to the starting node
which is in turn coupled to the starting node  . The reduced Hamiltonian of the graph in the basis
. The reduced Hamiltonian of the graph in the basis  is,
is,

Incorporating the anti-Hermitian term of the trap and considering large N, for simplicity, results in,

Let the state of the exciton at time t,  . The dynamics of the system is thus,
. The dynamics of the system is thus,

It is important to notice that due to adiabatic elimination,  , resulting in an effectively two level system whose dynamics is governed by A1 and A3. The Schrödinger equation simplifies to
, resulting in an effectively two level system whose dynamics is governed by A1 and A3. The Schrödinger equation simplifies to

The eigenstates and eigenvalues of H′ are

Here,  . It is worth noting that the two eigenstates are not orthogonal and the corresponding eigenvalues have both real and imaginary parts which is due to the fact that H′ is not Hermitian. Now, expressing
. It is worth noting that the two eigenstates are not orthogonal and the corresponding eigenvalues have both real and imaginary parts which is due to the fact that H′ is not Hermitian. Now, expressing  and
and  in terms of the two eigenstates enables us to calculate the probability of reaching the trap. Thus,
in terms of the two eigenstates enables us to calculate the probability of reaching the trap. Thus,

Here,  and
and  . The transport efficiency η in this case is 1.
. The transport efficiency η in this case is 1.
The trapping time or the transfer time, which is the average time required by the exciton to get absorbed by the trap is another relevant measure in quantum transport15. The trapping time is given by,

In this scenario, η = 1 and,

A closer look at τ shows that for κ very small, there is no trapping at all while for a large κ, one observes freezing of the evolution of the exciton owing to the quantum Zeno effect. The optimal value of the transfer time is obtained for  . This is in accordance to38,39, wherein the authors find that the optimal conditions for transport of an exciton in photosynthetic complexes, are when the time scales of hopping and trapping converge.
. This is in accordance to38,39, wherein the authors find that the optimal conditions for transport of an exciton in photosynthetic complexes, are when the time scales of hopping and trapping converge.
Highly symmetric graphs with broken links
Here, we show how the transport efficiency changes as we break links in the graphs mentioned previously in this section. For a graph with r broken links, we calculate the average transport efficiency by projecting the initial state, onto the subspace  for each of the possible configurations of the graph with r broken links and average over all of them. The initial state is set as as a statistical mixture of all nodes for the complete graph and the hypercube, while it is a statistical mixture of all leaf nodes in the case of a binary tree. The results are shown in Fig. 4.
for each of the possible configurations of the graph with r broken links and average over all of them. The initial state is set as as a statistical mixture of all nodes for the complete graph and the hypercube, while it is a statistical mixture of all leaf nodes in the case of a binary tree. The results are shown in Fig. 4.

Plots of average efficiency versus number of broken links for graphs.
(a)Binary tree with l levels, (b) complete graph with n nodes, (c) hypercube with dimension d. Clearly, the efficiency obtained by breaking some links is higher than the corresponding efficiency without broken links. This trend continues as long as the number of broken links is not of the order of the total number of links.
Note that this approach is much faster than diagonalizing the graph Hamiltonian and finding the overlap of the initial state with the eigenstates having non-zero overlap with the trap.
For all these structures, we observe that the average transport efficiency always improves by breaking a few links from the graph. This can be attributed to the fact that by breaking a small number of links, the symmetry is reduced and the dimension of the subspace to which the dynamics is restricted increases. Thus, this can be thought of as increasing the number of possible paths from the starting node to the trap, which previously lied outside this space owing to symmetry. However, we expect that when the number of broken links is comparable to the total number of links in the graph, the size of the reduced space would be very low as the trap gets decoupled from the graph in a large number of configurations and hence the efficiency is low. This is visible for the case of a binary of three levels and four broken links as shown in Fig. 4a with the average transport efficiency being lower than in the case of no broken links.
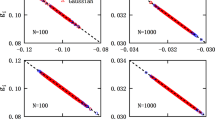
Bounds on fidelity of state transfer
In this section we show that the considerations made thus far for quantum transport can also be applied to the transfer of a qubit state in a network of spins with nearest neighbour interactions. We show that the square root of the efficiencies obtained for transport in various graphs are also upper bounds for the fidelity of the equivalent state transfer problem in the same graph. Thus, all the results obtained for quantum transport can be can also be interpreted in the context of qubit transfer in a network. In particular, we conclude that the fidelity of state transfer can be enhanced by removing links in the network.
Let us assume we have N spins disposed in the nodes of a graph, where each pair of spins interact if and only if they are connected by an edge. We model the interaction via the XY-Hamiltonian with uniform coupling J:

where the sum runs over the pairs (i, j) that represent an edge of the graph and  and
and  are Pauli matrices acting on the ith spin. The Hamiltonian HXY can be written equivalently as
are Pauli matrices acting on the ith spin. The Hamiltonian HXY can be written equivalently as

using the spin ladder operators  and
and  . This Hamiltonian conserves the number of excitations, i.e. it commutes with the operator
. This Hamiltonian conserves the number of excitations, i.e. it commutes with the operator  . If we restrict ourselves to the single excitation subspace of the total Hilbert space and define the basis
. If we restrict ourselves to the single excitation subspace of the total Hilbert space and define the basis

we can write

which is the same Hamiltonian defining a continuous time quantum walk used previously. This way, if our initial state is  , the fidelity of transfer to a node
, the fidelity of transfer to a node  is upper bounded by the overlap of
is upper bounded by the overlap of  with the subspace
with the subspace  , since this is an invariant subspace of the Hamiltonian. This way,
, since this is an invariant subspace of the Hamiltonian. This way,

where  is the projection operator onto
is the projection operator onto  . But as
. But as  (the efficiency of transport in the graph defined by HXY starting from a localized state
(the efficiency of transport in the graph defined by HXY starting from a localized state  ), the fidelity of transfer to state
), the fidelity of transfer to state  is bounded by
is bounded by  . It is important to note that the bound is, in general, not tight. The bound will only be tight when the reduced Hamiltonian (HXY projected onto
. It is important to note that the bound is, in general, not tight. The bound will only be tight when the reduced Hamiltonian (HXY projected onto  ) is the same as the reduced Hamiltonian of a graph where there is perfect state transfer (PST), i.e., a graph where the maximum fidelity of state transfer is one19. Also, in the cases where the reduced Hamiltonian is the same as the reduced Hamiltonian of a graph where there is pretty good state transfer (PGST), i.e., the maximum fidelity,
) is the same as the reduced Hamiltonian of a graph where there is perfect state transfer (PST), i.e., a graph where the maximum fidelity of state transfer is one19. Also, in the cases where the reduced Hamiltonian is the same as the reduced Hamiltonian of a graph where there is pretty good state transfer (PGST), i.e., the maximum fidelity,  , where ε can be arbitrarily close to 0, the bound is arbitrarily tight40. This can be fulfilled, for example, if the reduced Hamiltonian is a line having number of nodes N equal to p − 1, 2p − 1, where p is prime, or 2m − 1 with
, where ε can be arbitrarily close to 0, the bound is arbitrarily tight40. This can be fulfilled, for example, if the reduced Hamiltonian is a line having number of nodes N equal to p − 1, 2p − 1, where p is prime, or 2m − 1 with  . A graph where this is observed is a binary tree with with l levels such that l fulfils these criteria. With this observation, one could think of CTQWs as a way to prepare some multipartite entangled states with high fidelity, which is, in general, a difficult task. A quantum walk on the binary tree starting at the root node (i.e.,
. A graph where this is observed is a binary tree with with l levels such that l fulfils these criteria. With this observation, one could think of CTQWs as a way to prepare some multipartite entangled states with high fidelity, which is, in general, a difficult task. A quantum walk on the binary tree starting at the root node (i.e.,  ), would evolve, after some time, to a state arbitrarily close to a W-state
), would evolve, after some time, to a state arbitrarily close to a W-state

with  defined in Eq. (42). This can be perceived as a way to prepare genuine multipartite entangled states with no time dependent control.
defined in Eq. (42). This can be perceived as a way to prepare genuine multipartite entangled states with no time dependent control.
Another way to create such a highly entangled state is by tuning the couplings and site energies of the complete graph as in the spatial search (see Eq. (15)) such that the dynamics oscillates between a special node, with energy −1 and the equal superposition of all other nodes as depicted in Fig. 1c. Thus, by starting the quantum walk at this special node, after a time  , the quantum walk would be in the highly entangled state
, the quantum walk would be in the highly entangled state  (see Eq. (11)). A physical implementation of a complete graph can be achieved in ions traps where the interaction between the ions can be approximately distance independent41.
(see Eq. (11)). A physical implementation of a complete graph can be achieved in ions traps where the interaction between the ions can be approximately distance independent41.
Discussion
In this work, we explore the notion of invariant subspaces to simplify the analysis of continuous time quantum walk (CTQW) problems, where the quantity of interest is the probability amplitude at a particular node of the graph. This way, we obtain new results concerning the spatial search algorithm, quantum transport and state transfer.
First, we present an intuitive picture of the spatial search algorithm by mapping it to a transport problem on a reduced graph whose nodes represent the basis elements of the invariant subspace. Furthermore, we show that the algorithm runs optimally (in  time) on the complete graph with broken links and on complete bipartite graphs (CBG). These constitute one of the first examples of non-regular graphs where this happens. A particular case of the CBG is the star graph, which is planar, has low connectivity and is robust to imperfections in the form of missing links. Presently, we are considering the robustness of this algorithm to other kinds of defects. During the completion of this article, we came across Refs [42,43]. In the former, it is shown that high connectivity is not a good indicator for optimal spatial search by giving an example of a graph with low connectivity where the algorithm runs optimally and another graph with high connectivity, where the running time is not optimal. In43, a diagrammatic picture of the spatial search algorithm is presented.
time) on the complete graph with broken links and on complete bipartite graphs (CBG). These constitute one of the first examples of non-regular graphs where this happens. A particular case of the CBG is the star graph, which is planar, has low connectivity and is robust to imperfections in the form of missing links. Presently, we are considering the robustness of this algorithm to other kinds of defects. During the completion of this article, we came across Refs [42,43]. In the former, it is shown that high connectivity is not a good indicator for optimal spatial search by giving an example of a graph with low connectivity where the algorithm runs optimally and another graph with high connectivity, where the running time is not optimal. In43, a diagrammatic picture of the spatial search algorithm is presented.
Furthermore, we present a simple method to calculate transport efficiency in graphs without having to diagonalize the Hamiltonian. The efficiency is given by the overlap of the initial state with the invariant subspace. Thus, we calculate analytically the transport efficiency in structures such as the complete graph, binary tree and hypercube, given various initial conditions. Moreover, we explore the change in transport efficiency with broken links in these graphs. For the complete graph, breaking a link from the starting node increases the efficiency from 1/(N − 1) to a constant: 1, if the link broken was connected to the trap and 1/2 otherwise. In the former case, we analytically calculate the transfer time which is independent of N and is a function of the trapping rate.
Finally, we show that the square root of the efficiency of transport on a graph from a starting node to a destination (trap) node gives an upper bound on the fidelity of a single qubit transfer between these two nodes. This bound is tight if and only if the reduced Hamiltonian is that of a spin network wherein perfect state transfer takes place.
In summary, dimensionality reduction is an intuitive way to understand the behaviour of CTQWs in graphs with symmetry. Hence, this might lead to the design of new continuous time algorithms, the analysis of the robustness of CTQW algorithms to imperfections and to novel state transfer and state engineering protocols.
Additional Information
How to cite this article: Novo, L. et al. Systematic Dimensionality Reduction for Quantum Walks:Optimal Spatial Search and Transport on Non-Regular Graphs. Sci. Rep. 5, 13304; doi: 10.1038/srep13304 (2015).
References
Aharonov, Y., Davidovich, L. & Zagury, N. Quantum random walks. Physical Review A 48, 1687 (1993).
Farhi, E. & Gutmann, S. Quantum computation and decision trees. Physical Review A 58, 915 (1998).
Kempe, J. Quantum random walks: an introductory overview. Contemporary Physics 44, 307 (2003).
Aharonov, D., Ambainis, A., Kempe, J. & Vazirani, U. Quantum walks on graphs. In Proceedings of the thirty-third annual ACM symposium on Theory of computing, 50 (ACM, 2001).
Kendon, V. Quantum walks on general graphs. International Journal of Quantum Information 4, 791 (2006).
Reitzner, D., Nagaj, D. & Buzek, V. Quantum walks. Acta Physica Slovaca 61, 603 (2012).
Venegas-Andraca, S. E. Quantum walks: a comprehensive review. Quantum Information Processing 11, 1015–1106 (2012).
Omar, Y., Paunković, N., Sheridan, L. & Bose, S. Quantum walk on a line with two entangled particles. Physical Review A 74, 042304 (2006).
Childs, A. M., Gosset, D. & Webb, Z. Universal computation by multiparticle quantum walk. Science 339, 791 (2013).
Childs, A. M. On the relationship between continuous-and discrete-time quantum walk. Communications in Mathematical Physics 294, 581 (2010).
Childs, A. M. & Goldstone, J. Spatial search by quantum walk. Physical Review A 70, 022314 (2004).
Childs, A. M. et al. Exponential algorithmic speedup by a quantum walk. In Proceedings of the thirty-fifth annual ACM symposium on Theory of computing, 59-68 (ACM, 2003).
Childs, A. M. Universal computation by quantum walk. Physical Review Letters 102, 180501 (2009).
Mohseni, M., Rebentrost, P., Lloyd, S. & Aspuru-Guzik, A. Environment-assisted quantum walks in photosynthetic energy transfer. The Journal of chemical physics 129, 174106 (2008).
Rebentrost, P., Mohseni, M., Kassal, I., Lloyd, S. & Aspuru-Guzik, A. Environment-assisted quantum transport. New Journal of Physics 11, 033003 (2009).
Plenio, M. B. & Huelga, S. F. Dephasing-assisted transport: quantum networks and biomolecules. New Journal of Physics 10, 113019 (2008).
Caruso, F., Chin, A. W., Datta, A., Huelga, S. F. & Plenio, M. B. Highly efficient energy excitation transfer in light-harvesting complexes: The fundamental role of noise-assisted transport. The Journal of Chemical Physics 131, 105106 (2009).
Bose, S. Quantum communication through an unmodulated spin chain. Physical Review Letters 91, 207901 (2003).
Kay, A. Perfect, efficient, state transfer and its application as a constructive tool. International Journal of Quantum Information 8, 641 (2010).
Mohseni, M., Omar, Y., Engel, G. S. & Plenio, M. B. Quantum effects in biology (Cambridge University Press, 2014).
Bose, S., Casaccino, A., Mancini, S. & Severini, S. Communication in xyz all-to all quantum networks with a missing link. International Journal of Quantum Information 7, 713 (2009).
Janmark, J., Meyer, D. A. & Wong, T. G. Global symmetry is unnecessary for fast quantum search. Physical Review Letters 112, 210502 (2014).
Farhi, E. & Gutmann, S. Analog analogue of a digital quantum computation. Physical Review A 57, 2403 (1998).
Lanczos, C. An iteration method for the solution of the eigenvalue problem of linear differential and integral operators. J. Res. Nat’l Bur. Std. 45, 225 (1950).
Foulger, I., Gnutzmann, S. & Tanner, G. Quantum search on graphene lattices. Physical Review Letters 112, 070504 (2014).
Childs, A. M. & Ge, Y. Spatial search by continuous-time quantum walks on crystal lattices. Physical Review A 89, 052337 (2014).
Aaronson, S. & Ambainis, A. Quantum search of spatial regions. In Proceedings of the 44th Annual IEEE Symposium on Foundations of Computer Science, 200 (IEEE Computer Society, Washington, DC, USA, 2003).
Mohseni, M., Shabani, A., Lloyd, S., Omar, Y. & Rabitz, H. Geometrical effects on energy transfer in disordered open quantum systems. The Journal of chemical physics 138, 204309 (2013).
Jafarizadeh, M., Sufiani, R., Salimi, S. & Jafarizadeh, S. Investigation of continuous-time quantum walk by using Krylov subspace-Lanczos algorithm. The European Physical Journal B-Condensed Matter and Complex Systems 59, 199–216 (2007).
Krovi, H. & Brun, T. Quantum walks on quotient graphs. Physical Review A 75, 062332 (2007).
Reitzner, D., Hillery, M., Feldman, E. & Bužek, V. Quantum searches on highly symmetric graphs. Physical Review A 79, 012323 (2009).
Sufiani, R. & Bahari, N. Quantum search in structured database using local adiabatic evolution and spectral methods. Quantum Information Processing 12, 2813–2831 (2013).
Gong, Z.-X., Foss-Feig, M., Michalakis, S. & Gorshkov, A. V. Persistence of locality in systems with power-law interactions. Physical Review Letters 113, 030602 (2014).
Kumar, A. & Sarovar, M. On model reduction for quantum dynamics: symmetries and invariant subspaces. Journal of Physics A: Mathematical and Theoretical 48, 015301 (2015).
Farhi, E., Goldstone, J., Gutmann, S. & Sipser, M. Quantum computation by adiabatic evolution. quant-ph/0001106 (2000).
Kempe, J. Discrete Quantum Walks Hit Exponentially Faster. Probability Theory and Related Fields 133, 215–235 (2005).
Novo, L., Mohseni, M. & Omar, Y. Disorder-assisted quantum transport in suboptimal decoherence regimes. arXiv. 1312, 6989 (2013).
Mohseni, M., Shabani, A., Lloyd, S. & Rabitz, H. Energy-scales convergence for optimal and robust quantum transport in photosynthetic complexes. The Journal of Chemical Physics 140, 035102 (2014).
Shabani, A., Mohseni, M., Rabitz, H. & Lloyd, S. Numerical evidence for robustness of environment-assisted quantum transport. Physical Review E 89, 042706 (2014).
Godsil, C., Kirkland, S., Severini, S. & Smith, J. Number-theoretic nature of communication in quantum spin systems. Physical Review Letters 109, 050502 (2012).
Jurcevic, P. et al. Quasiparticle engineering and entanglement propagation in a quantum many-body system. Nature 511, 202 (2014).
Meyer, D. A. & Wong, T. G. Connectivity is a poor indicator of fast quantum search. Physical Review Letters 114, 110503 (2015).
Wong, T. Diagrammatic approach to quantum search. Quantum Information Processing 14, 1767–1775 (2015).
Acknowledgements
LN, SC and YO thank the support from Fundação para a Ciência e a Tecnologia (Portugal), namely through programmes PTDC/POPH and projects UID/Multi/00491/2013, UID/EEA/50008/2013, IT/QuSim and CRUP-CPU/CQVibes, partially funded by EU FEDER and from the EU FP7 projects LANDAUER (GA 318287) and PAPETS (GA 323901). MM and HN acknowledge support from Quantum Artificial Intelligence Laboratory at Google. Furthermore, LN and SC acknowledge the support from the DP-PMI and FCT (Portugal) through scholarships SFRH/BD/52241/2013 and SFRH/BD/52246/2013 respectively. We would like to thank Mohan Sarovar, Akshat Kumar and Bruno Mera for useful comments, as well as Abolfazal Bayat and Rainer Blatt for useful discussions while visiting the Physics of Information Group in Lisbon.
Author information
Authors and Affiliations
Contributions
LN and SC contributed equally to the calculations. All authors participated in the discussion of the results and preparation of the article.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Electronic supplementary material
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Novo, L., Chakraborty, S., Mohseni, M. et al. Systematic Dimensionality Reduction for Quantum Walks: Optimal Spatial Search and Transport on Non-Regular Graphs. Sci Rep 5, 13304 (2015). https://doi.org/10.1038/srep13304
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep13304
This article is cited by
-
Spatial search on Johnson graphs by continuous-time quantum walk
Quantum Information Processing (2022)
-
Dimerized decomposition of quantum evolution on an arbitrary graph
Quantum Information Processing (2020)
-
Overview: recent development and applications of reduction and lackadaisicalness techniques for spatial search quantum walk in the near term
Quantum Information Processing (2020)
-
Perfect state transfer by means of discrete-time quantum walk on complete bipartite graphs
Quantum Information Processing (2017)
-
Spatial search by continuous-time quantum walk with multiple marked vertices
Quantum Information Processing (2016)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
