
Abstract
Einstein-Podolsky-Rosen steering is a form of quantum nonlocality intermediate between entanglement and Bell nonlocality. Although Schrödinger already mooted the idea in 1935, steering still defies a complete understanding. In analogy to “all-versus-nothing” proofs of Bell nonlocality, here we present a proof of steering without inequalities rendering the detection of correlations leading to a violation of steering inequalities unnecessary. We show that, given any two-qubit entangled state, the existence of certain projective measurement by Alice so that Bob's normalized conditional states can be regarded as two different pure states provides a criterion for Alice-to-Bob steerability. A steering inequality equivalent to the all-versus-nothing proof is also obtained. Our result clearly demonstrates that there exist many quantum states which do not violate any previously known steering inequality but are indeed steerable. Our method offers advantages over the existing methods for experimentally testing steerability and sheds new light on the asymmetric steering problem.
Similar content being viewed by others

Introduction
Quantum nonlocality is an invaluable resource in numerous quantum information protocols. It is part of a hierarchical structure1: quantum states that have Bell nonlocality2 form a subset of Einstein-Podolsky-Rosen steerable states which, in turn, form a subset of entangled states. The concept of steering can historically be traced back to Schrödinger's reply3 to the Einstein-Podolsky-Rosen argument4 and it has since been rigorously formulated by Wiseman, Jones and Doherty1.
Within the steering scenario, Alice prepares a bipartite system, keeps one particle and sends the other one to Bob. She announces that the Bob's particle is entangled with hers and thus that she has the ability to “steer” the state of Bob's particle at a distance. This means that she could prepare Bob's particle in different states by measuring her particle using different settings. However, Bob does not trust Alice; Bob worries that she may send him some unentangled particles and fabricate the results using her knowledge about the local hidden state (LHS) of his particles. Bob's task is to prove that no such hidden states exist.
The study of Bell nonlocality have witnessed phenomenal developments to date with important widespread applications5,6,7. Its existence can be demonstrated through two different approaches: the first concerns the violations of Bell inequalities and the second relies on an all-versus-nothing (AVN) proof without inequalities8,9,10,11. The AVN proof shows a logical contradiction between the local-hidden-variable models and quantum mechanics and thus offers an elegant argument of the nonexistence of local-hidden-variable models. What is possible with Bell nonlocality and local hidden variables should also be possible with steering and local hidden states. In stark contrast to Bell nonlocality, the study of steering is still at its infancy. Recent works like Refs. 1,12 put steering on firmer grounds. Like Bell nonlocality, this topic is generally of broad interest, as it hinges on questions pertaining to the foundations of quantum physics13 and at the same time reveals new possibilities for quantum information14. Einstein-Podolsky-Rosen steering can be detected through the violation of a steering inequality, which rules out the LHS model in the same spirit in which the violation of a Bell inequality rules out the local-hidden-variable model. Recently, several steering inequalities have been proposed and experimentally tested15,16,17,18. Nevertheless, steering is far from being completely understood and the subject deserves further investigation.
The AVN proof for Bell nonlocality8,9,10,11 has been developed to rule out any local-hidden-variable models. Likewise, it is interesting to find out if there an analogous AVN proof which can rule out any LHS models for steering. The purpose of this work is to present an affirmative answer to this question by showing that Einstein-Podolsky-Rosen steering without inequalities exists in a two-qubit system. This proof is an analogy of AVN argument for Bell nonlocality without inequalities and offers advantages over the existing methods for experimentally testing steerability as well as shedding new light on the asymmetric steering problem. In addition, a steering inequality based on the AVN proof is also obtained.
Results
Steering without inequalities for two qubits
The two-setting steering scenario can be described as follows: at the beginning, Alice prepares a two-qubit state ρAB. She keeps one qubit and sends the other to Bob. She then announces that it is entangled with the one she holds (see Fig. 1) and that she could remotely “steer” his state by projective measurements  , with
, with  the measurement direction, a (with a = 0, 1) the Alice's measurement result,
the measurement direction, a (with a = 0, 1) the Alice's measurement result,  the 2 × 2 identity matrix and
the 2 × 2 identity matrix and  the vector of the Pauli matrices. Bob then asks Alice to perform two projective measurements
the vector of the Pauli matrices. Bob then asks Alice to perform two projective measurements  and
and  (with
(with  ) on her qubit and to tell him the measurement results of a. After Alice's measurement has been done, Bob obtains the four conditional states
) on her qubit and to tell him the measurement results of a. After Alice's measurement has been done, Bob obtains the four conditional states  . Alice could cheat Bob if there exists an ensemble
. Alice could cheat Bob if there exists an ensemble  (see the gray box with colored particles in Fig. 1) and a stochastic map
(see the gray box with colored particles in Fig. 1) and a stochastic map  from ξ to a, such that the following equations hold,
from ξ to a, such that the following equations hold,

In order for Bob to be convinced that Alice can steer his state, Bob needs to be sure that no such hidden states are indeed possible. If we demand that Bob's states possess an LHS description, then his density matrices should satisfy Eq. (1). A contradiction among the four equations, meaning that they cannot have a common solution of  and
and  , convinces Bob that an LHS model does not exist and that Alice can steer the state of his qubit.
, convinces Bob that an LHS model does not exist and that Alice can steer the state of his qubit.

The steering scenario illustration.
Alice first prepares a two-qubit state and keeps one qubit. She then sends the other qubit to Bob and announces that it is entangled with the one she possesses (see the pair of red balls and green arrows). Thus she could remotely “steer” Bob's state by projective measurements. However, Bob does not trust Alice and he worries that she may fabricate the results using her knowledge about LHS. In the two-setting steering scenario, Bob asks Alice to perform two specific projective measurements on her qubit (see the red dashed arrow) and to let him know the measurement results (see the blue dashed arrow). After Alice's measurement (see the measurement device), Bob obtains four conditional states (see the dashed circle). Alice could cheat Bob if there exists an ensemble (see the gray box with colored particles) and a stochastic map, such that the set of equations (1) holds. To be convinced that Alice can steer his state, Bob needs to confirm that no such hidden states are possible.
It is worth mentioning that the set of equations (1) plays an analogous role to the one in the standard Greenberger-Horne-Zeilinger (GHZ) argument8. The principal difference between the arguments is that the set of equations in (1) deal with density matrices whereas in the GHZ argument, each equation pertains to the outcomes of measurements and therefore corresponds to real numbers. The constraints imposed by LHS model on density matrices are much stricter than constraints imposed by real numbers. This provides an intuitive explanation as to why AVN proof would work for the Einstein-Podolsky-Rosen steering of two-qubit states.
Suppose that Alice initially prepares a product state ρAB = |ψA〉〈ψA|  |ψB〉〈ψB|. It can be verified that, for any projective measurement
|ψB〉〈ψB|. It can be verified that, for any projective measurement  (with
(with  and
and  ) performed by Alice, Bob always obtains two identical pure normalized conditional states as
) performed by Alice, Bob always obtains two identical pure normalized conditional states as  , (a = 0, 1), which means that Alice cannot steer Bob's state. Moreover, Bob can obtain two identical pure normalized conditional states if and only if ρAB is a direct-product state. Hence, hereafter we assume that
, (a = 0, 1), which means that Alice cannot steer Bob's state. Moreover, Bob can obtain two identical pure normalized conditional states if and only if ρAB is a direct-product state. Hence, hereafter we assume that  and
and  are two different pure states, i.e.,
are two different pure states, i.e.,  .
.
For a general ρAB,  are not pure. If they are pure, then ρAB possesses the following uniform form:
are not pure. If they are pure, then ρAB possesses the following uniform form:

where  are eigenstates of
are eigenstates of  ,
,  is a 2 × 2 complex matrix under the positivity condition of ρAB and
is a 2 × 2 complex matrix under the positivity condition of ρAB and  is the Hermitian conjugation of
is the Hermitian conjugation of  .
.
For ρAB, it is not difficult to find that  if and only if ρAB is separable and the state ρAB admits a LHS (which means that it is not steerable) if and only if
if and only if ρAB is separable and the state ρAB admits a LHS (which means that it is not steerable) if and only if  (see the Methods section). In a two-setting steering protocol of
(see the Methods section). In a two-setting steering protocol of  , if Bob can obtain two different pure normalized conditional states along Alice's projective direction
, if Bob can obtain two different pure normalized conditional states along Alice's projective direction  (or
(or  ), the following three propositions are equivalent: (i)
), the following three propositions are equivalent: (i)  . (ii) ρAB is entangled. (iii) No LHS model exists for Bob's states, so ρAB is steerable (in the sense of Alice steering Bob's state). We thus have our steering argument concluded and that is given any two-qubit entangled state, the existence of certain projective measurement by Alice so that Bob's normalized conditional states are two different pure states provides a criterion for Alice-to-Bob steerability.
. (ii) ρAB is entangled. (iii) No LHS model exists for Bob's states, so ρAB is steerable (in the sense of Alice steering Bob's state). We thus have our steering argument concluded and that is given any two-qubit entangled state, the existence of certain projective measurement by Alice so that Bob's normalized conditional states are two different pure states provides a criterion for Alice-to-Bob steerability.
Although the standard GHZ argument is elegant for providing a full contradiction between local-hidden-variable model and quantum mechanics (with 100% success probability), its validity is only limited to some pure states with high symmetry, such as N-qubit GHZ states and cluster states with N ≥ 319. Hardy attempted to extend the GHZ argument to an arbitrary two-qubit system9. However, Hardy's argument works for only 9% of the runs of a specially constructed experiment. Moreover, Hardy's proof is not valid for two-qubit maximally entangled state. To overcome this, Cabello proposed an AVN proof for two observers, each possessing a two-qubit maximally entangled state10,11. Nowadays, there is no AVN proof of Bell nonlocality for a genuine two-qubit state presented. However, we show that for any two-qubit entangled state ρAB, if there exists a projective direction  such that Bob's normalized conditional states
such that Bob's normalized conditional states  become two different pure states, then Alice can steer Bob's state. Our steering argument is not only valid for two-qubit pure states, but it is also applicable to a wider class of states including mixed states.
become two different pure states, then Alice can steer Bob's state. Our steering argument is not only valid for two-qubit pure states, but it is also applicable to a wider class of states including mixed states.
The AVN proof versus the known steering inequalities
Let us compare our result with the known steering inequalities. First, they play different roles in demonstrating steering: steering inequality follows a similar approach to the Bell inequality for Bell nonlocality, while steering without inequality serves as an analogous counterpart to the GHZ test of Bell nonlocality without Bell inequalities.
Secondly, our argument shows that there are many quantum steerable states that do not violate any known steering inequalities. For an example, consider the state

where |Ψ(θ)〉 = cos θ|00〉 + sin θ|11〉, |Φ(θ)〉 = cos θ|10〉 + sin θ|01〉. It is entangled when V ∈ [0, 1/2) ∪ (1/2, 1] and θ ∈ (0, π/2). It can be easily verified that, for state (2), after Alice performs an  -direction measurement on her qubit, Bob's normalized conditional states are just two different pure states, cos θ|0〉 + sin θ|1〉 and cos θ|0〉 − sin θ|1〉. Thus, based on our AVN proof of steering, Alice can always steer Bob's state using just a two-setting protocol
-direction measurement on her qubit, Bob's normalized conditional states are just two different pure states, cos θ|0〉 + sin θ|1〉 and cos θ|0〉 − sin θ|1〉. Thus, based on our AVN proof of steering, Alice can always steer Bob's state using just a two-setting protocol  . On the other hand, a class of N-setting steering inequality
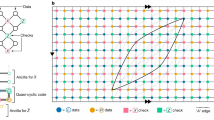
. On the other hand, a class of N-setting steering inequality  has been introduced in Ref. 15 to show the ability of Alice steering Bob's state. By running a numerical check of a 10-setting steering inequality of the above form, we observe that, for some regions of V and θ, the steering inequality cannot detect the steering of state (2)(as shown in Fig. 2 a). The colors denote different violation values, as shown in the legend. The blank region indicates that the steerability of state (2) cannot be detected by resorting to this inequality.
has been introduced in Ref. 15 to show the ability of Alice steering Bob's state. By running a numerical check of a 10-setting steering inequality of the above form, we observe that, for some regions of V and θ, the steering inequality cannot detect the steering of state (2)(as shown in Fig. 2 a). The colors denote different violation values, as shown in the legend. The blank region indicates that the steerability of state (2) cannot be detected by resorting to this inequality.

(a) Detecting steerability of the state (2) using the ten-setting steering inequalities.We explore the steering of state (2) via violation of the ten-setting inequality presented in Ref. 15. The colors denote different values of quantum violation, as scaled in the legend. The blank region indicates that steerability of (2) cannot be detected by this inequality. With the replacement  and
and  in the above inequality, one obtains a similar steering inequality
in the above inequality, one obtains a similar steering inequality  to show Bob's ability of steering Alice's state. The inequality
to show Bob's ability of steering Alice's state. The inequality  yields the same violation region. This indicates that steering inequalities in Ref. 15 cannot reveal asymmetric steering. (b) Detecting steerability using the steering inequality (3). We show the steering of the state ρcol through violation of inequality (3). Quantum prediction of the left-hand-side of the inequality always succeeds 0 unless V = 0 or θ = 0, π/2.
yields the same violation region. This indicates that steering inequalities in Ref. 15 cannot reveal asymmetric steering. (b) Detecting steerability using the steering inequality (3). We show the steering of the state ρcol through violation of inequality (3). Quantum prediction of the left-hand-side of the inequality always succeeds 0 unless V = 0 or θ = 0, π/2.
Finally, unlike quantum entanglement and Bell nonlocality, the definition of steering is asymmetric1,20. Our AVN proof can shed light on this problem. The state (2) is not symmetric under a permutation of Alice and Bob (even with local unitary transformations acting on the state). The known steering inequalities in Ref. 15 do not reveal asymmetric steering (see Fig. 2 a). However, our argument presents a promising way to reveal asymmetric steering. According to our AVN proof, the state (2) exhibits two-setting asymmetric steering. On one hand, Alice can always steer Bob's state using just the two-setting protocol  . On the other hand, after Bob has performed a projective measurement along an arbitrary
. On the other hand, after Bob has performed a projective measurement along an arbitrary  -direction on his qubit, Alice's normalized conditional states can never be cast into two different pure states, allowing for the existence of LHS models. Take the state with parameters V = 3/5 and θ = π/8 as an example (whose corresponding point is outside of the colored region in Fig. 2 a): Numerical results show that, for any two-setting protocol
-direction on his qubit, Alice's normalized conditional states can never be cast into two different pure states, allowing for the existence of LHS models. Take the state with parameters V = 3/5 and θ = π/8 as an example (whose corresponding point is outside of the colored region in Fig. 2 a): Numerical results show that, for any two-setting protocol  , there is always a solution of LHS for Alice's conditional states. In short, this example illustrates a state in which the steering scenario is not interchangeable. This result can be of practical importance, since asymmetric steering has applications in one-way quantum cryptography21 and may have potential applications in other fields of quantum information processing.
, there is always a solution of LHS for Alice's conditional states. In short, this example illustrates a state in which the steering scenario is not interchangeable. This result can be of practical importance, since asymmetric steering has applications in one-way quantum cryptography21 and may have potential applications in other fields of quantum information processing.
A steering inequality
It is known that a Bell inequality can be derived from the GHZ argument22. This is also the case for the steering without inequalities argument. The steering inequality equivalent to the AVN proof reads

subject to the constraint  . Here
. Here  are projectors as
are projectors as  ,
,  ,
,  , with
, with  orthogonal to
orthogonal to  ,
,  ,
,  ,
,  and
and  is the upper bound for the LHS model. Its physical implication can be described as follows: Suppose Alice performs a projective measurement in the
is the upper bound for the LHS model. Its physical implication can be described as follows: Suppose Alice performs a projective measurement in the  -direction and finds that Bob can obtain two different pure normalized conditional states, then
-direction and finds that Bob can obtain two different pure normalized conditional states, then  . They then perform a joint-measurement
. They then perform a joint-measurement  (in which Alice's measurement direction is perpendicular to
(in which Alice's measurement direction is perpendicular to  -direction). According to Lemma 2 (see the Methods section), the LHS model requires
-direction). According to Lemma 2 (see the Methods section), the LHS model requires  , thus the probability
, thus the probability  is bounded by CLHS. However, with quantum mechanics, this bound is always exceeded due to a non-vanishing
is bounded by CLHS. However, with quantum mechanics, this bound is always exceeded due to a non-vanishing  .
.
As an instance, we investigate the steering of state  , with color noise
, with color noise  by using our inequality (3). We find that Bob's conditional states on Alice's projective measurement in the z-direction are two different pure states |0〉〈0| and |1〉〈1| and the upper bound is CLHS = (1 + V | cos 2θ|)/4. The quantum prediction of the left-hand-side of inequality (3) reads
by using our inequality (3). We find that Bob's conditional states on Alice's projective measurement in the z-direction are two different pure states |0〉〈0| and |1〉〈1| and the upper bound is CLHS = (1 + V | cos 2θ|)/4. The quantum prediction of the left-hand-side of inequality (3) reads  for θ ∈ [0, π/4] and
for θ ∈ [0, π/4] and  for θ ∈ [π/4, π/2], which do not vanish unless V = 0 or θ = 0, π/2 (see Fig. 2 b). The violation of the inequality clearly demonstrates that the state ρcol possesses steerability except V = 0 or θ = 0, π/2.
for θ ∈ [π/4, π/2], which do not vanish unless V = 0 or θ = 0, π/2 (see Fig. 2 b). The violation of the inequality clearly demonstrates that the state ρcol possesses steerability except V = 0 or θ = 0, π/2.
Discussion
We have presented an AVN proof of Einstein-Podolsky-Rosen steering for two qubits without inequalities based on a two-setting steering protocol. The argument is valid for any two-qubit entangled state, both pure and mixed. We show that many quantum states that do not violate any known steering inequalities are indeed steerable states. This provides a new perspective for understanding steerability and offers an elegant argument for the nonexistence of LHS models without resorting to steering inequalities. The result also sheds new light on the asymmetric steerability – a phenomenon with no counterpart in quantum entanglement and Bell nonlocality. The result is testable through measurements of Bob's conditional states and provides a simple alternative to the existing experimental method for detecting steerability15,16,17,18. Theoretically, a two-setting steering protocol can be used to show that no LHS models exist for ρAB if the state satisfies the condition given in our AVN argument. Experimentally, the determination of the steerability of a quantum state can be done by performing quantum state tomography23 on Bob's qubit. Moreover, a steering inequality is obtained from our AVN argument and this inequality offers another way to test steerability of states. Like Bell nonlocality whose importance has only been realized with the rapid development of quantum information science, we anticipate further developments in this exciting area.
Methods
We prove two Lemmas in the section. The steerability of ρAB is equivalent to that of the state  . It is always possible for Alice to choose an appropriate unitary matrix
. It is always possible for Alice to choose an appropriate unitary matrix  that rotates the direction
that rotates the direction  to the direction
to the direction  . Therefore, we can initially set
. Therefore, we can initially set  by studying the state
by studying the state  instead of ρAB. After Alice performs a projective measurement in the
instead of ρAB. After Alice performs a projective measurement in the  -direction, Bob's unnormalized conditional states are
-direction, Bob's unnormalized conditional states are


with  ,
,  ,
,  and
and  . Then one has
. Then one has

Lemma 1
 if and only if
if and only if  is separable.
is separable.
Proof
Look at the form of  , obviously
, obviously  implies
implies  is separable. To prove the converse, one needs the definition of separability:
is separable. To prove the converse, one needs the definition of separability:  , where τAi and τBi are, respectively, Alice and Bob's local density matrices and pi > 0 satisfy
, where τAi and τBi are, respectively, Alice and Bob's local density matrices and pi > 0 satisfy  . For convenience, let
. For convenience, let  denote the element of Alice's density matrix τAi. By calculating
denote the element of Alice's density matrix τAi. By calculating  and
and  , one has
, one has  ,
,  and
and  be two pure states that are orthogonal to |ϕ1〉 and |ϕ2〉, respectively. Notice that
be two pure states that are orthogonal to |ϕ1〉 and |ϕ2〉, respectively. Notice that  , thus, for any index i, we have
, thus, for any index i, we have  , which results in
, which results in

Since  , they cannot be simultaneously perpendicular to the state τBi, thus
, they cannot be simultaneously perpendicular to the state τBi, thus  , which yields
, which yields  due to positivity condition of τAi. So
due to positivity condition of τAi. So  . Lemma 1 is henceforth proved.
. Lemma 1 is henceforth proved.
Lemma 2
The state  admits a local-hidden-state (LHS) model (which means that it is not steerable) if and only if
admits a local-hidden-state (LHS) model (which means that it is not steerable) if and only if  .
.
Proof
 implies
implies  is separable, thus
is separable, thus  admits a LHS model. Now we focus on the proof of necessity. If Alice's measurement setting is
admits a LHS model. Now we focus on the proof of necessity. If Alice's measurement setting is  , then one has
, then one has


Substitute Eqs. (4a)(4b)(6a)(6b) into Eq. (1) and due to  and
and  , one immediately has ρξ ∈ {|ϕ1〉〈ϕ1|, |ϕ2〉〈ϕ2|} for any ξ. Based on which, Eqs. (6a) (6b) are valid only if
, one immediately has ρξ ∈ {|ϕ1〉〈ϕ1|, |ϕ2〉〈ϕ2|} for any ξ. Based on which, Eqs. (6a) (6b) are valid only if  , with αx,
, with αx,  . Similarly, if Alice's measurement setting is
. Similarly, if Alice's measurement setting is  , then one has
, then one has  , with αy,
, with αy,  . If there exists a LHS model for Bob's states, then
. If there exists a LHS model for Bob's states, then  , with α = αx + iαy, β = βx + iβy. Substitute
, with α = αx + iαy, β = βx + iβy. Substitute  into Eq. (5), we have
into Eq. (5), we have

with  and
and  . Now we construct the following two projectors:
. Now we construct the following two projectors:  ,
,  , where |χ1〉 is the eigenvector of Tα with eigenvalue
, where |χ1〉 is the eigenvector of Tα with eigenvalue  and |χ2〉 is the eigenvector of Tβ with eigenvalue
and |χ2〉 is the eigenvector of Tβ with eigenvalue  . Because
. Because  is a density matrix, one has
is a density matrix, one has

This leads to  . Lemma 2 is henceforth proved.
. Lemma 2 is henceforth proved.
Three measurement settings were mentioned in the proof of Lemma 2. This does not mean that we need a three-setting protocol to show steering. For a given entangled state  , a two-setting protocol is enough to demonstrate steering. Lemma 2 shows that
, a two-setting protocol is enough to demonstrate steering. Lemma 2 shows that  and
and  cannot be linearly expanded of |ϕ1〉〈ϕ1| and |ϕ2〉〈ϕ2| simultaneously (because that means
cannot be linearly expanded of |ϕ1〉〈ϕ1| and |ϕ2〉〈ϕ2| simultaneously (because that means  and ρAB is separable). For a given
and ρAB is separable). For a given  , if
, if  , then using
, then using  to demonstrate steering, otherwise using
to demonstrate steering, otherwise using  .
.
References
Wiseman, H. M., Jones, S. J. & Doherty, A. C. Steering, entanglement, nonlocality and the Einstein-Podolsky-Rosen paradox. Phys. Rev. Lett. 98, 140402 (2007).
Bell, J. S. On The Einstein Podolsky Rosen Paradox. Physics (Long Island City, N.Y.) 1, 195 (1964).
Schrödinger, E. Discussion of probability relations between separated systems. Proc. Cambridge Philos. Soc. 31, 555–563 (1935).
Einstein, A., Podolsky, B. & Rosen, N. Can Quantum-Mechanical Description of Physical Reality Be Considered Complete? Phys. Rev. 47, 777 (1935).
Ekert, A. K. Quantum cryptography based on Bells theorem. Phys. Rev. Lett. 67, 661 (1991).
Brukner, Č., Żukowski, M., Pan, J.-W. & Zeilinger, A. Bells Inequalities and Quantum Communication Complexity. Phys. Rev. Lett. 92, 127901 (2004).
Pironio, S. et al. Random numbers certified by Bell's theorem. Nature (London) 464, 1021 (2010).
Greenberger, D. M., Horne, M. A. & Zeilinger, A. in Bell's Theorem, Quantum Theory and Conceptions of the Universe (eds Kafatos M.) 69 (Kluwer, Dordrecht, Holland, 1989).
Hardy, L. Nonlocality for two particles without inequalities for almost all entangled states. Phys. Rev. Lett. 71, 1665 (1993).
Cabello, A. Bell's Theorem without Inequalities and without Probabilities for Two Observers. Phys. Rev. Lett. 86, 1911 (2001).
Cabello, A. “All versus Nothing” Inseparability for Two Observers. Phys. Rev. Lett. 87, 010403 (2001).
Jones, S. J., Wiseman, H. M. & Doherty, A. C. Entanglement, Einstein-Podolsky-Rosen correlations, Bell nonlocality and steering. Phys. Rev. A 76, 052116 (2007).
Oppenheim, J. & Wehner, S. The Uncertainty Principle Determines the Nonlocality of Quantum Mechanics. Science 330, 1072 (2010).
Branciard, C., Cavalcanti, E. G., Walborn, S. P., Scarani, V. & Wiseman, H. M. One-sided device-independent quantum key distribution: Security, feasibility and the connection with steering. Phys. Rev. A 85, 010301(R) (2012).
Saunders, D. J., Jones, S. J., Wiseman, H. M. & Pryde, G. J. Experimental EPR-steering using Bell-local states. Nature Phys. 6, 845 (2010).
Smith, D. H. et al. Conclusive quantum steering with superconducting transition edge sensors. Nature Comm. 3, 625 (2012).
Bennet, A. J. et al. Arbitrarily loss-tolerant Einstein-Podolsky-Rosen steering allowing a demonstration over 1 km of optical fiber with no detection loophole. Phys. Rev. X 2, 031003 (2012).
Wittmann, B. et al. Loophole-free quantum steering. New J. Phys. 14, 053030 (2012).
Scarani, V., Acín, A., Schenck, E. & Aspelmeyer, M. Nonlocality of cluster states of qubits. Phys. Rev. A 71, 042325 (2005).
Händchen, V. et al. Observation of one-way EinsteinPodolskyRosen steering. Nature Photonics 6, 596 (2012).
Olsen, M. K. & Bradley, A. S. Bright bichromatic entanglement and quantum dynamics of sum frequency generation. Phys. Rev. A 77, 023813 (2008).
Mermin, N. D. Extreme quantum entanglement in a superposition of macroscopically distinct states. Phys. Rev. Lett. 65, 1838 (1990).
James, D. F. V., Kwiat, P. G., Munro, W. J. & White, A. G. Measurement of qubits. Phys. Rev. A 64, 052312 (2001).
Acknowledgements
J.L.C. is supported by the National Basic Research Program (973 Program) of China under Grant No. 2012CB921900 and the NSF of China (Grant Nos. 10975075 and 11175089). A.C. is supported by the Spanish Project No. FIS2011-29400. This work is also partly supported by the National Research Foundation and the Ministry of Education, Singapore (Grant No. WBS: R-710-000-008-271).
Author information
Authors and Affiliations
Contributions
J.L.C. initiated the idea. J.L.C., X.J.Y., H.Y.S. and C.W. established the proof. J.L.C., C.W., A.C., L.C.K. and C.H.O. wrote the main manuscript text. H.Y.S. and X.J.Y. prepared figures 1 and 2. All authors reviewed the manuscript.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Additional information
Reprints and permission information is available at www.nature.com/reprints.
Rights and permissions
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareALike 3.0 Unported License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3.0/
About this article
Cite this article
Chen, JL., Ye, XJ., Wu, C. et al. All-Versus-Nothing Proof of Einstein-Podolsky-Rosen Steering. Sci Rep 3, 2143 (2013). https://doi.org/10.1038/srep02143
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep02143
This article is cited by
-
Relating intrinsic concurrence to quantum steering and its application in teleportation for three-qubit states
Quantum Information Processing (2024)
-
Neural network representations of quantum many-body states
Science China Physics, Mechanics & Astronomy (2020)
-
Detecting EPR steering via two classes of local measurements
Quantum Information Processing (2020)
-
Characterizing Bell nonlocality and EPR steering
Science China Physics, Mechanics & Astronomy (2019)
-
Role of maximally entangled states in the context of linear steering inequalities
Quantum Information Processing (2019)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
