
Abstract
The current paradigm of self-propelled motion of liquid droplets on surfaces with chemical or topographical wetting gradients is always mono-directional. In contrast, here, we demonstrate bidirectional droplet motion, which we realize using liquid infused surfaces with topographical gradients. The deposited droplet can move either toward the denser or the sparser solid fraction area. We rigorously validate the bidirectional phenomenon using various combinations of droplets and lubricants, and different forms of structural/topographical gradients, by employing both lattice Boltzmann simulations and experiments. We also present a simple and physically intuitive analytical theory that explains the origin of the bidirectional motion. The key factor determining the direction of motion is the wettability difference of the droplet on the solid surface and on the lubricant film.
Similar content being viewed by others


Introduction
Controlling droplet motion on a solid surface is important for a wide range of applications, from droplet microfluidics to water harvesting and self-cleaning surfaces1,2,3,4,5,6. Among the various approaches to induce motion, a good passive strategy is to introduce a wetting gradient on the solid surface, as this does not require energy to be provided continuously to the system. Such spontaneous motion has been extensively investigated for binary fluid systems under a variety of wetting gradients, including due to variations in surface chemistry7,8, topography9,10,11 and elasticity12.
More recently, there has been a growing interest to study droplet self-propulsion on liquid-infused surfaces13,14,15. These are composite substrates constructed by infusing rough, textured or porous materials with wetting lubricants16,17,18, which are known for their ‘slippery’ properties. They have also been shown to exhibit a number of other advantageous surface properties, including anti-biofouling, anti-icing and self-healing19,20,21. Importantly, in all cases reported to date, including existing works on liquid-infused surfaces, droplet motion on surfaces with texture/topographical gradients is always uni-directional towards the denser solid fraction area, where the textures are more closely packed.
In contrast, here we will demonstrate a bidirectional droplet motion. The presence of the lubricant on liquid-infused surfaces can be exploited for a novel self-propulsion mechanism, in which the droplet may have preferential wetting on either the denser or the sparser solid fraction area. We structure our contribution as follows. First, we develop an analytical theory that elaborates how topographical gradient gives rise to the driving force that can propel droplets toward two possible directions. The spontaneous bidirectional motion depends on the combination of the solid, lubricant and liquid droplet, and it can occur as long as the lubricant does not fully wet the solid both in presence of the gas and the liquid droplet surroundings. We then verify our theory using both lattice Boltzmann simulations and experiments. We demonstrate this phenomenon can be observed using various liquid combinations for the droplets and lubricants, as well as for different forms of structural gradients.
Results
The origin of the driving force
When a liquid droplet is placed on a homogenous solid surface, it stays stationary because the surface tension force pulls the base of the droplet equally in the radial direction22. This force balance is broken when the wettability of one side of the droplet is different from the other, resulting in a spontaneous droplet motion towards the more wettable region of the solid23.
On liquid-infused surfaces, the apparent contact angle of a droplet depends on the surface tensions and the intrinsic contact angles of all fluids involved in the system24,25,26. This rich interplay makes it much less trivial to predict the direction of droplet motion when there is a topographical gradient. Figure 1 provides an example of the bidirectional motion. In Fig. 1(a), when a structured substrate with a topographical gradient is infused with an ionic liquid, a water droplet placed on the surface moves toward the sparser solid fraction area. In contrast, when the same substrate is infused with Krytox oil, the water droplet moves toward the denser solid fraction area, as shown in Fig. 1(b). To understand this bidirectional droplet motion, we need to break down the contributing surface tension forces.

a Water droplet on ionic liquid-infused surface moves toward sparser solid area, while for b Krytox-infused surface, the water droplet moves toward denser solid area. For the two cases, only the lubricant is changed. The dashed shapes represent the initial position of the droplets, and the arrows the direction of motion of the droplets.
Consider a liquid droplet placed on top of a liquid-infused surface with topographical gradient, as shown in Fig. 2(a). The substrate is set horizontally such that gravity does not play a role. For convenience, we use the subscripts w, o, a and s to refer to the droplet, infusing lubricant, air and solid phases, respectively. Furthermore, we introduce the spreading parameter18,
with γαβ the interfacial tension between phases α and β. The droplet is encapsulated by the lubricant when S > 018,25,27, see Fig. 2(b). For S < 0, the droplet is not encapsulated, as illustrated in Fig. 2(c).

a The droplet and lubricant meniscus are represented by the turquoise and orange discs, respectively. The greater solid fraction (fs) area is indicated by the darker colour. R and r are the droplet base radius and meniscus width, respectively. Γout and Γin are the surface tension forces per unit length that act on the outer and inner contact lines, with ϕ the angle in the azimuthal direction, and dl and dL the infinitesimal length of the inner and the outer contact lines respectively. b, c Depending on the sign of the spreading parameter S, the lubricant may encapsulate the droplet. d Magnification of the meniscus area (side-view). The dashed line at the droplet–air interface indicates the possibility of lubricant encapsulation, while the grey rectangles represent the surface topography, infused with lubricant (orange). The red arrows indicate the relevant interfacial tensions γ(s, o)α of the composite solid-lubricant surface with fluid phase α. e–h Possible wetting states depending on the lubricant contact angle on the solid surface in the droplet (θow) and air (θoa) environments.
We will now argue that liquid-infused surfaces can be considered as composite surfaces of solid and lubricant, with fractions of fs and (1 − fs), respectively. Therefore, the composite interfacial tension of the liquid-infused surface with phase α is γ(s,o)α ≡ fsγsα + (1 − fs)γoα. Letting the solid fraction fs vary in the x-direction only leads to the interfacial tensions (Fig. 2(d))
The relevant surface tension forces per unit length that pull the droplet in the radial direction are Γin = γ(s,o)o − γ(s,o)w and Γout = γ(s,o)a − γ(s,o)o for the inner (droplet–lubricant–composite substrate) and the outer (lubricant–air–composite substrate) contact lines, respectively. As detailed in Supplementary Note 1, we assume that the droplet shape is in quasi-equilibrium, so that the net contributions from the droplet–air, droplet–lubricant and lubricant–air surface tensions go to zero. Indeed, both in the experiments and simulations, only a slight asymmetry in the droplet shapes is observed. Furthermore, since fs does not vary with y, only the x-component of the forces contributes to the driving force, i.e., \({\Gamma }_{{\rm{in}}}\cos \varphi\) and \({\Gamma }_{{\rm{out}}}\cos \varphi\) (see Fig. 2(a)). The total driving force is thus the sum of these surface tensions integrated over the total perimeters of the inner and outer contact lines,
Assuming the droplet base is circular, we can express dl = Rdφ and dL = (R + r)dφ. In this case, the terms without fs(x) vanish when the driving force is integrated over the contact line since \(\oint \cos \varphi dL=0\) and \(\oint \cos \varphi dl=0\). Moreover, if the meniscus is much smaller than the droplet base radius, we can approximate R + r ≈ R, and thus, dl = dL = Rdφ. The finite meniscus size case is described in Supplementary Note 1.
In this vanishing meniscus approximation, we can substitute the definitions of the composite interfacial tensions in Eqs. (2)–(4) to Eq. (5), and write the driving force as
We have explicitly kept the γso in the above equation for clarity. In particular, we can simplify Eq. (6) by employing the Young’s contact angles of the lubricant in the air and in the droplet phase environment, respectively, defined as \(\cos {\theta }_{{\rm{oa}}}=({\gamma }_{{\rm{sa}}}-{\gamma }_{{\rm{so}}})/{\gamma }_{{\rm{oa}}}\) and \(\cos {\theta }_{{\rm{ow}}}=({\gamma }_{{\rm{sw}}}-{\gamma }_{{\rm{so}}})/{\gamma }_{{\rm{ow}}}\). In this case, Eq. (6) becomes
We can expect spontaneous motion to occur if either the droplet–lubricant–solid line or the air–lubricant–solid contact line is present. This is typically the case when θow or θoa is non-zero18, as illustrated in Fig. 2(e) and (f), respectively. The driving force ceases (F = 0) only if the surface topography is covered by a layer of lubricant everywhere. Thermodynamically, this occurs when the lubricant completely wets the solid surface both in the droplet and air phase environments18, such that θow = θoa = 0, as illustrated in Fig. 2(g) and (h), respectively. In addition, the air–lubricant–solid contact line may also become absent if significant excess lubricant is used.
To determine the direction of droplet motion, we can introduce the droplet–air effective interfacial tension26
and the following definitions of apparent contact angles
such that the driving force in Eq. (6) can be written in the following form
\({\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}\) and \({\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}}\) are defined as the contact angles of the droplet, either encapsulated by lubricant or not, on a smooth solid surface and on the lubricant surface, respectively. When there is no encapsulation, γeff = γwa and hence \({\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}={\theta }_{{\rm{wa}}| {\rm{s}}}\), which is the familiar Young’s contact angle of a droplet on a smooth solid surface22.
Let us now discuss the terms in Eq. (9). The term under the integral depends on the details of the surface patterning, fs(x), and it modulates the strength of the driving force. The direction of the driving force is determined only by the sign of the gradient in fs(x) and by the prefactor
which is in fact independent of the surface texture. This has a clear and intuitive physical interpretation: it corresponds to the preferential wetting of the droplet on the region exhibiting the majority of solid or lubricant surface. Without any loss of generality, let us assume that the gradient in fs(x) is positive, i.e., the solid fraction becomes denser with increasing x. When \(\cos {\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}> \cos {\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}}\), the droplet prefers to wet the solid rather than the lubricant. Therefore, the droplet moves toward the solid majority surface (denser solid area). In contrast, when \(\cos {\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}<\cos {\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}}\), the droplet moves toward the lubricant majority surface (sparser solid area).
Demonstration of bidirectional motion
To validate the prediction of Eq. (10), we perform both simulations and experiments of droplets moving across liquid-infused surfaces with textural gradients. Supplementary Movies 1, 2 and 3 show the typical droplet motion on linear and stepwise gradients from our experiments. The details of the simulation and experimental methods are provided in the Method section and in Supplementary Methods.
Figure 3(a) shows a phase diagram for the normalised driving force (\(\tilde{F}\)), predicted by Eq. (10) (colourmap), and the corresponding droplet motion observed in the numerical simulations and the experiments (symbols). The upper section of the phase map corresponds to an expected driving force directed towards the denser solid regions, while the lower section towards the sparser solid regions. The colour of the symbols represents motion to the denser (blue) or sparser (red) solid fraction area, showing a good agreement between the numerical simulations and the experiments with the theoretical prediction.

a The colourmap describes the normalised driving force \(\tilde{F}\) provided in Eq. (10), with \({\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}\) and \({\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}}\)the droplet apparent contact angle on a smooth solid surface and on a lubricant surface, respectively. The data points were obtained from simulations and experiments, in which the droplets were observed to move to the solid majority (blue) or the lubricant majority (red) surfaces. The symbols ⊕ , ⊲, ♢, × and ○ are from simulations, where we have used linear gradient of rectangular posts in b full 3D and c quasi 3D setups, stepwise gradient of d rectangular posts and e grooves in quasi 3D setups, and f 2D setups. Here, the solid and lubricant are coloured in yellow and orange, respectively. The symbols ⋆ and ⊳ are from experiments (the hollow symbols indicate the lubricant encapsulation case). They correspond to (g) stepwise gradient and (h) linear gradient of grooves. The solid and lubricant are represented in grey and orange, respectively.
Our numerical simulations show that the mechanism leading to bidirectional motion holds and that the relevant control parameter linked to the topography of the solid is the solid fraction fs. Two major advantages of the numerical simulations are that we are able to systematically explore a wide range of variations in surface tensions and surface topographies. Specifically, we consider three different simulation geometries. First, we use full three-dimensional (3D) simulations with linear gradient of rectangular posts (⊕ , Fig. 3(b)). For the linear gradient, the post length is increased for each subsequent post in the x-direction. Second, we carry out quasi 3D simulations, where a cylindrical droplet and only a period of the surface features in the y direction are used. Here, we employ both a linear gradient of rectangular posts (⊲, Fig. 3(c)), as well as stepwise gradients of rectangular posts (♢, Fig. 3(d)) and grooves (× , Fig. 3(e)). In the case of a stepwise gradient, the substrate is divided into lower and higher fs regimes. Third, we use two-dimensional (2D) simulations (○, Fig. 3(f)). Here, the topographical gradient is not simulated explicitly, but instead it is represented by varying the effective lubricant-droplet contact angle θow(x) and the effective lubricant–air contact angle θoa(x)28:
where the subscript α = w, a and \(\cos {\theta }_{{\rm{o}}\alpha }^{{\rm{Y}}}\) is the contact angle on the smooth flat surface. In Fig. 3, few exceptions are present for the 2D simulations, where some of the red data points cross the diagonal line in the phase diagram. This is due to the finite size effect of the lubricant meniscus. As explained in Supplementary Note 1, such a finite size effect becomes relevant for \(\tilde{F}\approx 0\) (close to the diagonal line in the phase diagram).
Our experimental results correspond to two different solid surface geometries: stepwise and linear gradients (see Fig. 3(g, h)); and, crucially, show that the direction of motion of a droplet on a given topography can be switched by choosing the interfacial tensions. In Fig. 3, we report experimental results for water droplets and ethylene glycol droplets in contact with different lubricants. In the phase diagram, the hollow and filled symbols correspond to cases where the droplet is encapsulated and not encapsulated by the lubricant, respectively.
To position the experimental data points in the phase diagram, it is necessary to infer the effective wettability of the surface, given by \(\cos {\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}\) and \(\cos {\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}}\). If the values of θwa∣s, γwa, γoa and γow are known in the literature29, they can simply be calculated from Eq. (8). We are able to calculate these for five different droplet–lubricant combinations, as tabulated in Supplementary Note 2. Alternatively, we can determine \(\cos {\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}\) and \(\cos {\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}}\) using a graphical method as follows. In the vanishing meniscus approximation, the droplet apparent contact angle on the composite solid-lubricant surface can be expressed as24,26
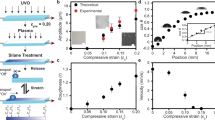
As shown in Fig. 4 for seven separate droplet–lubricant pairs, by measuring θapp for different values of the solid fraction fs, we can determine the normalised driving force \(\tilde{F}\) from the gradient of the curve. Furthermore, \(\cos {\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}\) and \(\cos {\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}}\) can be inferred by extrapolating the curve to fs = 1 and fs = 0. A key advantage of this graphical method is that we can determine \(\tilde{F}\), and hence the direction of droplet motion, without the need to identify the precise wetting states. Droplet self-propulsion can be observed as long as the surface textures are not fully covered by the lubricant. All experimental values of \(\cos {\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}\), \(\cos {\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}}\) and consequently \(\tilde{F}\) used in Fig. 3 are provided in Supplementary Note 2. In all cases, the predicted direction of motion is in agreement with our observation.

Each point is the average of five apparent contact angle θapp measurements of sessile droplets at a given solid fraction fs. The surrounding coloured area represents the standard deviation. Dashed lines are fits of Eq. (13) using the least-square method. The gradient of the fits corresponds to \(\tilde{F}\), while extrapolations of those fits to fs = 1 and fs = 0 give a measure of the values of the cosine of droplet contact angle on pure solid, \(\cos {\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}\), and on pure lubricant, \(\cos {\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}}\), respectively.
It is also useful to estimate the typical driving force experienced by the droplet. Following Eq. (9), the driving force can be written as
For the linear groove, we typically vary fs from 0.1 to 0.9 over a sample of 2 cm, leading to α ~ 40 m−1; while for the stepwise groove, the length scale for the variation in the solid fraction can be taken to be the droplet diameter, ~2 mm, giving α ~400 m−1. Taking typical values for γeff and \(\tilde{F}\) as tabulated in Supplementary Note 2, we find a driving force of the order of 1 − 10 μN for the linear groove and 10 − 100 μN for the stepwise groove.
Discussion
We have reported a spontaneous bidirectional motion of droplet on liquid-infused surfaces with topographical gradients. In contrast to previous studies describing uni-directional droplet motion on surfaces with topographical gradients, here the droplet can move toward the sparser or the denser solid fraction area. We investigated the origin of this bidirectional motion by looking into the relevant surface tension forces acting on the droplet. Our analytical theory predicts, and our simulation and experimental results confirmed, that the direction of the motion is determined by a simple physical quantity, \((\cos {\theta }_{{\rm{wa}}| {\rm{s}}}^{{\rm{eff}}}-\cos {\theta }_{{\rm{wa}}| {\rm{o}}}^{{\rm{eff}}})\). This quantity can be intuitively interpreted as preferential wetting of the droplet on the solid majority surface (denser solid area) or on the lubricant majority surface (sparser solid area). The bidirectional motion is also validated over a wide range of surface tension and contact angle combinations, with and without lubricant encapsulation, and for different types of topographical gradients, both in our simulations and experiments.
There are a number of avenues of future work to exploit the novel phenomenon described here. The most immediate question is to better understand the droplet dynamics. In experiments, the observed typical droplet velocity varies over a wide range, from ~0.07 to ~9.24 mm/s (data provided in Supplementary Note 2). The resulting droplet velocity is due to a complex balance between the driving force due to the texture gradients and the viscous dissipation. Recent studies have shown that there are different contributing mechanisms for viscous dissipation in the droplet and lubricant18,27,30,31,32,33. The dominant contributions depend on the viscosity ratio between the droplet and lubricant31, the wettability of the lubricant and its meniscus shape32, the amount of excess lubricant27, and the surface texture geometry33.
It also remains an open problem, which types of topographical gradients are optimal. To illustrate this point, in Supplementary Note 3 we have compared lattice Boltzmann simulation results for droplet motion under (i) a stepwise groove, (ii) and (iii) linear rectangular posts with square and hexagonal arrangements, and (iv) a linear groove. The stepwise groove provides the highest droplet velocity, but the distance travelled by the droplet is limited. In contrast, the linear groove allows much further droplet displacement but the droplet velocity is slower. In addition, the simulations on the post geometries highlight complex stick-slip droplet motion due to contact line pinning by the surface topography. However, a major advantage of using posts is that we can potentially introduce topographical gradients in two separate directions. Systematic study on different surface textures is an important area for further investigations.
Finally, it is interesting to consider potential applications of the reported bidirectional motion. Since different droplet–lubricant combination may move to different direction, we envisage it can be exploited to sort droplets based on their interfacial properties, and when combined with gravity, simultaneously based on their size and interfacial properties, by playing off the competition between the forces due to wetting gradient and due to gravity. More complex applications include liquid/liquid separation or directing chemical reactions in a droplet microfluidic device.
Methods
Numerical method
Our numerical simulations are carried out employing a ternary free energy lattice Boltzmann method suitable for studying three fluids systems in complex geometries32,34. The free energy model is given by
where Cm is the concentration of fluid phase m. In our simulations, m = 1, 2, 3 represent the droplet, gas and lubricant phases, respectively. The simulation parameters α, κ and hm are used to tune the interfacial thermodynamics of the system. Specifically, α and κ determine the interface width and surface tension between the fluid phases. The hm parameters are related to the intrinsic contact angles of the fluids with the solid. Supplementary Methods provide additional details on how these parameters are chosen.
In the following, we set the local fluid density to be uniform, i.e., ρ = C1 + C2 + C3 = 1, since we expect that the effect of inertia is negligible for the droplet motion. Alternative simulation schemes are available for situations where the density difference between the fluid phases is important35,36. Then, introducing the order parameters ϕ ≡ C1 − C2, and ψ ≡ C3, we can solve the fluid equations of motion corresponding to the continuity, Navier–Stokes, and two Cahn–Hilliard equations
where \(\overrightarrow{v}\) and η are the fluid velocity and viscosity, respectively. Equations (19) and (20) describe the evolution of ϕ and ψ, and, correspondingly, the interfaces between the three fluids. The thermodynamic properties of the system, described in the free energy model in Eq. (16), enter the equations of motion via the chemical potentials, μq = δΨ/δq, (q = ϕ and ψ), and the pressure tensor, P, defined by ∂βPαβ = ϕ∂αμϕ + ψ∂αμψ. The equations of motion in Eqs. (17)–(20) are solved using the lattice Boltzmann method34,37.
As discussed in the “Results” section, we have carried out three different types of simulation geometries. It is worth noting that, in the full and quasi 3D simulations, the driving force for droplet motion arises due to gradient in the surface textures. If there is no topographical gradient, the droplet is stationary. In the 2D simulations, however, since we do not explicitly simulate the surface texture, we introduce wetting gradients and hence the driving force for droplet motion by varying the lubricant-droplet and lubricant–air contact angles via the hm parameters in Eq. (16).
Experimental method
For the experiments, we use photolithography to produce surfaces with 60 μm deep grooves in the x-direction. The width of each groove can be tuned (between 10 and 75 μm) to obtain solid fractions fs ranging from 0.1 to 0.9. This allows us to create topographical gradients along the x-direction by continuously increasing or decreasing the width of the grooves. The typical sample size is 2 cm long and 1 cm wide. After fabrication, the geometry of the surfaces is carefully measured using optical profilometry and SEM (scanning electron microscope) imaging.
To reduce the contact angle hysteresis that would hinder droplet motion, the structured surfaces are treated with SOCAL (Slippery Omniphobic Covalently Attached Liquid), following the protocol from Wang et al.38, modified for SU-8 substrates (see Supplementary Methods for details). We verify the SOCAL coating by measuring the contact angle (104∘ ± 2∘) and contact angle hysteresis (<5∘) of a water droplet deposited on a non-structured (flat) region of the sample.
The surfaces are then dipped in a lubricant and left to drain vertically for 10 min, in order to fill the grooves and create a liquid-infused surface. Droplets are finally deposited on the imbibed surfaces using a thin needle and their motion is tracked using a camera placed on the side. The volume of the liquid droplets used in the experiments is 5 μl, with typical droplet base diameter ≈2 mm. When placed on the substrate, the droplet is approximately sitting on top of 30 stripes. To rule out the effect of gravity on the droplet motion, the surface is slightly tilted (≈0.5∘) against the direction of motion. The procedure is repeated five times for each configuration to ensure reproducibility.
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
Code availability
The ternary lattice Boltzmann code used in the current study are available from the corresponding author on reasonable request.
References
Cho, S. K., Moon, H. & Kim, C.-J. Creating, transporting, cutting, and merging liquid droplets by electrowetting-based actuation for digital micro uidic circuits. J. Microelectromech. Syst. 12, 70–80 (2003).
Li, X.-M., Reinhoudt, D. & Crego-Calama, M. What do we need for a superhydrophobic surface? A review on the recent progress in the preparation of superhydrophobic surfaces. Chem. Soc. Rev. 36, 1350–1368 (2007).
Willmott, G. R., Neto, C. & Hendy, S. C. Uptake of water droplets by non-wetting capillaries. Soft Matter 7, 2357–2363 (2011).
Damak, M. & Varanasi, K. K. Electrostatically driven fog collection using space charge injection. Sci. Adv. 4, eaao5323 (2018).
Labbé, R. & Duprat, C. Capturing aerosol droplets with fibers. Soft Matter 15, 6946–6951 (2019).
Sun, Q. et al. Surface charge printing for programmed droplet transport. Nat. Mater. 18, 936–941 (2019).
Chaudhury, M. K. & Whitesides, G. M. How to make water run uphill. Science 256, 1539–1541 (1992).
Varnik, F. et al. Wetting gradient induced separation of emulsions: a combined experimental and lattice Boltzmann computer simulation study. Phys. Fluids 20, 072104 (2008).
Reyssat, M., Pardo, F. & Quéré, D. Drops onto gradients of texture. Europhys. Lett. 87, 36003 (2009).
Moradi, N., Varnik, F. & Steinbach, I. Roughnessgradient-induced spontaneous motion of droplets on hydrophobic surfaces: a lattice Boltzmann study. Europhys. Lett. 89, 26006 (2010).
Li, J. et al. Oil droplet self-transportation on oleophobic surfaces. Sci. Adv. 2, e1600148 (2016).
Style, R. W. et al. Patterning droplets with durotaxis. Proc. Natl Acad. Sci. U.S.A 110, 12541–12544 (2013).
Zhang, C. et al. Bioinspired pressure-tolerant asymmetric slippery surface for continuous self- transport of gas bubbles in aqueous environment. ACS Nano 12, 2048–2055 (2018).
McCarthy, J., Vella, D. & Castrejón-Pita, A. A. Dynamics of droplets on cones: self-propulsion due to curvature gradients. Soft Matter 15, 9997–10004 (2019).
Launay, G. et al. Self-propelled droplet transport on shaped-liquid surfaces. https://arxiv.org/abs/1908.01305 (2019).
Wong, T.-S. et al. Bioinspired self-repairing slippery surfaces with pressure-stable omniphobicity. Nature 477, 443–447 (2011).
Lafuma, A. & Quéré, D. Slippery pre-suffused surfaces. Europhys. Lett. 96, 56001 (2011).
Smith, J. D. et al. Droplet mobility on lubricantimpregnated surfaces. Soft Matter 9, 1772–1780 (2013).
Juuti, P. et al. Achieving a slippery, liquid-infused porous surface with anti-icing properties by direct deposition of ame synthesized aerosol nanoparticles on a thermally fragile substrate. Appl. Phys. Lett. 110, 161603 (2017).
Weisensee, P. B. et al. Condensate droplet size distribution on lubricant-infused surfaces. Int. J. Heat. Mass Transf. 109, 187–199 (2017).
Villegas, M., Zhang, Y., Abu Jarad, N., Soleymani, L. & Didar, T. F. Liquid-infused surfaces: a review of theory, design, and applications. ACS Nano 13, 8517–8536 (2019).
Young, T. III An essay on the cohesion of uids. Philos. Trans. R. Soc. Lond. 95, 65–87 (1805).
Subramanian, R. S., Moumen, N. & McLaughlin, J. B. Motion of a drop on a solid surface due to a wettability gradient. Langmuir 21, 11844–11849 (2005).
Semprebon, C., McHale, G. & Kusumaatmaja, H. Apparent contact angle and contact angle hysteresis on liquid infused surfaces. Soft Matter 13, 101–110 (2017).
Kreder, M. J. et al. Film dynamics and lubricant depletion by droplets moving on lubricated surfaces. Phys. Rev. X 8, 031053 (2018).
McHale, G., Orme, B. V., Wells, G. G. & Ledesma-Aguilar, R. Apparent contact angles on lubricant-impregnated surfaces/SLIPS: From superhydrophobicity to electrowetting. Langmuir 35, 4197–4204 (2019).
Daniel, D., Timonen, J. V. I., Li, R., Velling, S. J. & Aizenberg, J. Oleoplaning droplets on lubricated surfaces. Nat. Phys. 13, 1020–1025 (2017).
Cassie, A. B. D. & Baxter, S. Wettability of porous surfaces. Trans. Faraday Soc. 40, 546–551 (1944).
Girifalco, L. & Good, R. A theory for the estimation of surface and interfacial energies. I. Derivation and application to interfacial tension. J. Phys. Chem. 61, 904–909 (1957).
Mistura, G. & Pierno, M. Drop mobility on chemically heterogeneous and lubricant-impregnated surfaces. Adv. Phys.: X 2, 591–607 (2017).
Keiser, A., Keiser, L., Clanet, C. & Quéré, D. Drop friction on liquid-infused materials. Soft Matter 13, 6981–6987 (2017).
Sadullah, M. S., Semprebon, C. & Kusumaatmaja, H. Drop dynamics on liquid-infused surfaces: the role of the lubricant ridge. Langmuir 34, 8112–8118 (2018).
Keiser, L., Keiser, A., L’Estimé, M., Bico, J. & Reyssat, É. Motion of viscous droplets in rough confinement: paradoxical lubrication. Phys. Rev. Lett. 122, 074501 (2019).
Semprebon, C., Krüger, T. & Kusumaatmaja, H. Ternary free-energy lattice Boltzmann model with tunable surface tensions and contact angles. Phys. Rev. E 93, 033305 (2016).
Wöhrwag, M., Semprebon, C., MazloomiMoqaddam, A., Karlin, I. & Kusumaatmaja, H. Ternary free-energy entropic lattice Boltzmann model with a high density ratio. Phys. Rev. Lett. 120, 234501 (2018).
Bala, N., Pepona, M., Karlin, I., Kusumaatmaja, H. & Semprebon, C. Wetting boundaries for a ternary high-density-ratio lattice Boltzmann method. Phys. Rev. E 100, 013308 (2019).
Briant, A. J. & Yeomans, J. M. Lattice Boltzmann simulations of contact line motion. II. Binary uids. Phys. Rev. E 69, 031603 (2004).
Wang, L. & McCarthy, T. Covalently attached liquids: instant omniphobic surfaces with unprecedented repellency. Angew. Chem. 128, 252 (2015).
Acknowledgements
M.S.S. is supported by an LPDP (Lembaga Pengelola Dana Pendidikan) scholarship from the Indonesian Government. H.K. acknowledges funding from EPSRC (grant EP/P007139/1) and Procter and Gamble. G.G.W. and G.L. acknowledge funding from EPSRC (grant EP/P026613/1).
Author information
Authors and Affiliations
Contributions
H.K., G.W., R.L.A. designed the research and supervised the project. M.S.S., J.P. and H.K. developed the theory and carried out the simulations. G.L. and G.W. performed the experiments. Y.G. and G.M. contributed in the interpretation of the results. H.K. and M.S.S. drafted the manuscript, with all authors contributing to the writing of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sadullah, M.S., Launay, G., Parle, J. et al. Bidirectional motion of droplets on gradient liquid infused surfaces. Commun Phys 3, 166 (2020). https://doi.org/10.1038/s42005-020-00429-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s42005-020-00429-8
This article is cited by
-
Flexibly designable wettability gradient for passive control of fluid motion via physical surface modification
Scientific Reports (2023)
-
Particle-Based Numerical Modelling of Liquid Marbles: Recent Advances and Future Perspectives
Archives of Computational Methods in Engineering (2022)
-
On the lifetimes of two-dimensional droplets on smooth wetting patterns
Journal of Engineering Mathematics (2022)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
