
Abstract
In this work, we study the influence of orbital viscosity on the evolution of the order-parameter and texture in the B phase of superfluid 3He near a moving boundary. From the redistribution of thermal quasiparticles within the texture, we develop a model which confers a substantial effective mass on the interface, and provides a new mechanism for friction as the boundary moves. We have tested the model against existing data for the motion of an A-B interface whose motion was controlled by a magnetic field. The model allows us to make predictions for the behaviour in experimental situations which involve texture rearrangement arising from motion of the B-phase boundary.
Similar content being viewed by others
Introduction
Many systems1,2,3,4,5,6,7 condense into coherent states characterised by a “rigidity” to distortions in their wave function description8. Among such systems, superfluid 3He at very low temperature can condense in two phases, A and B. The bulk properties of the A and B phases are presently very well understood9. However close to boundaries, the topology of the order parameter changes and one might expect unconventional behaviour10.
In this context, the motivation for the present work arises from the very high dissipation observed when an A-B interface in superfluid 3He is spatially oscillated at very low temperatures (\(T\sim 0.16{T}_{c}\)), as reported previously11. In that work, the dissipation of a moving A-B interface was measured over a frequency range of 0.1 to 50 Hz. These very high dissipations have encouraged the formulation of the model presented here, and it is these measurements which provide the basis of comparison with the model.
To explain these results we have identified a new source of dissipation within the moving superfluid condensate that is generally taken to be frictionless. This mechanism should be relevant to all multiple-phase coherent condensates with non-trivial topologies. We show that there is an effective inertia and damping associated with the change in the topology of the orbital angular momentum. Using the model presented here, we are able to successfully test the results against previously unexplained experimental observations, to make quantitative predictions and further to propose additional experiments.
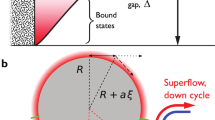
Superfluid 3He can be thought of as comprising three separate components: the mass superfluid, the spin superfluid and the orbital superfluid. The dynamics of the orbital superfluid is so strongly clamped by the normal fluid that it has been largely ignored in previous work. In zero magnetic field, the B phase of 3He is pseudo-isotropic, having no net spin or orbital angular momentum and an isotropic energy gap Δ012. However, when exposed to a magnetic field the B-phase order parameter becomes distorted with the energy gap acquiring a minimum along the orbital anisotropy axis lB. In a strong magnetic field (i.e. comparable to that required to stabilize the A-phase), the B-phase anisotropy becomes dominated by the Zeeman splitting resulting in a large density of thermal excitations occupying states along the lB axis. Any sudden change in the spatial orientation of lB will generate substantial dissipation as the thermal excitations must redistribute.
The redistribution of thermal excitations has two components. First, there is a dissipative component which can be related to the orbital viscosity, as discussed by Fisher and Suramlishvili13, and secondly, a reactive component which can be viewed as an effective mass, which we have discussed in an earlier paper14 in which we reported a very preliminary attempt at introducing orbital dynamic ideas specifically to explain the specific case of the behavior of a moving A-B interface. Since then we have realized that our initial treatment can be extended and is not only appropriate to the moving phase interface, but can be given much more general validity allowing it to be applied to any B-phase boundary, e.g. at a solid boundary to a wire surface or moving plate. This new extension of the applicability of these ideas is the subject of the current paper.
In general, the orbital textures bend near boundaries. At solid walls, for example, say in a cylindrical geometry, with the magnetic field parallel to the cylindrical axis, the energetically favorable spatial distribution of lB is the “flare-out” texture15,16,17. Here, lB lies parallel to the magnetic field in the bulk liquid far from the walls and bends to accommodate the condition that it must lie perpendicular to the side walls. The orbital axis lB also bends at an interface between the A and the B phases, stabilized by a magnetic field gradient (at low temperatures and pressures the critical field for the A-B phase transition is Bc = 340 mT). In the bulk B phase lB lies parallel to the magnetic field direction, but at the interface the energetically favoured orientation is that parallel to the interface18.
In this work we study the effect of the change of the orbital direction at the boundaries of the B-phase in magnetic fields due to the movement of these boundaries. As we are interested in the change of the tilt angle, taking as reference the direction of the magnetic field, this can be considered a nutation motion when described using Euler angles. We apply the results to describe the dynamical behavior of an oscillating A-B interface at very low temperatures and in high magnetic fields and also to provide predictions on what will happen when the B-phase boundaries move. The dissipation will depend on the orientation of the movement of the boundary with respect to the equilibrium texture configuration.
Results
The model
Following Schopohl19 and Ashida and Nagai20, the energy of a quasiparticle excitation with momentum p and spin \(\sigma \hslash \) in a magnetic field is given by:
here \({E}_{\parallel }(p)={({\xi }^{2}+{{\rm{\Delta }}}_{\parallel }^{2}{\hat{p}}_{\parallel }^{2})}^{\frac{1}{2}}\) (with \(\xi =(p-{p}_{F}){v}_{F}\)) is the kinetic energy relative to the Fermi energy. \({{\rm{\Delta }}}_{\parallel }\) and Δ⊥ are the energy gaps parallel and perpendicular to lB, \({\hat{p}}_{\parallel }\) and \({\hat{p}}_{\perp }\) are the parallel and perpendicular components of the quasiparticle momentum unit vector, vF is the Fermi velocity and pF is the Fermi momentum. The quasiparticle Zeeman energy, with Fermi-liquid corrections, is \(\sigma \hslash {\tilde{\omega }}_{L}\) where σ = ±1/2. Since the Zeeman splitting dominates the anisotropy, the two gap components, \({{\rm{\Delta }}}_{\parallel }\) and Δ⊥, can be approximated by the zero field gap Δ020,21,22. The minimum quasiparticle energy depends on the angle between the quasiparticle momentum and the lB axis. At temperatures well below Tc more or less all the excitations occupy the lowest energy states, with momenta centered around the lB axis. Thus any change in the local orientation of lB will alter the quasiparticle energies and the subsequent relaxation of the excitations back to equilibrium will proceed on a time scale τ. This provides the fundamental mechanism by which an effective mass and friction is imparted to moving boundaries.
A change in the orientation of lB by δθ gives rise to a change in the quasiparticle energies of
where θ is the angle between the magnetic field direction and the lB vector.
This produces a viscous torque23,24
where μ is the orbital viscosity.
In the B phase at low temperatures, the orbital viscosity μ was previously shown to be13
to first order in \({\tilde{\omega }}_{L}^{2}\). Here, τ is the quasiparticle relaxation time, N(0) is the normal density of states at the Fermi surface, and Δ we can take as approximately equal to the zero-field gap Δ0.
If we assume that the B-phase orbital texture responds instantaneously to any change in the position of the interface, then we may neglect any orbital dynamics and presume that lB always takes up its equilibrium orientation θ(r − rI) relative to the boundary interface rI. This adiabatic approximation is ultimately justified as long as the characteristic time of the motion of the boundary is much greater than τ. Any fuller treatment in the future should also take into account the dynamics of the lB texture itself. Now let us consider a small change in the position of the boundary interface δrI. This will result in the orientation of the texture in the B phase adjusting by
meaning that
Note that ▽θ is a tensor of the second order.
The corresponding work done on the quasiparticle distribution can be written:
the integral being taken over the whole of the B-phase volume.
The corresponding effect on the boundary dynamics can be found by equating the work done by the viscous torque (7) to that done by the moving boundary. The force exerted per unit surface by the moving boundary, considering only the effect of the viscous torque, will have both a reactive (inertial) and dissipative (frictional) component, \({\bf{F}}={m}_{l}{\ddot{{\bf{r}}}}_{I}+{\gamma }_{l}{\dot{{\bf{r}}}}_{I}\). We can decompose the motion into the Fourier modes, so \({\ddot{{\bf{r}}}}_{I}=i\omega {\dot{{\bf{r}}}}_{I}\) and the work done on moving the interface by δrI can be written as:
Setting this equal to the work done on the quasiparticles, Eq. (7), along with expressions (5) and (6) gives:
Thus the real part of the orbital viscosity provides the friction coefficient γl and the imaginary part provides the effective mass ml. Note that this expression is valid for any angle between the surface normal and the angular momentum vector.
Equilibrium texture parallel to the interface
The expression of Eq. (9) allows us to make some predictions. Let us take the simplest case where the equilibrium texture configuration is parallel to the interface which is in the horizontal direction, and in the bulk the lB texture is vertical, in the direction of the magnetic field B. The situation is shown in Fig. 1. In this configuration lB must turn towards the horizontal as the interface is approached18. This rotation takes place over a distance of order ξB. The corresponding texture has been calculated numerically by finding the configuration which minimizes the bending energy and the magnetic free energy simultaneously24. It is plotted in Fig. 2 where θ is the angle between lB and the vertical axis z.

Sketch of the case discussed in the main text. The interface lies in the xy plane and we take the magnetic field B as pointing in the z direction. In the bulk, the lB texture lies parallel to the magnetic field B in the z direction. On approaching the interface, lB must rotate to become parallel to the interface, following the trajectory illustrated in Fig. 2. The vector δr denotes the translation of the interface in a random direction.

Numerical calculation of the lB texture near the A-B interface. θ is the angle between lB and the z axis. The points are a plot of (π/2)exp(−(z − zI)/ξB) taking zI at the origin. In the inset is plotted lB as a vector of unit length in arbitrary units, showing the change in the orientation. The x and z axes are in units of ξB.
Thus, in this particular situation the texture θ(z) is described well by
Now take as the displacement of the interface a translation in the x and z directions,
so
Then using (9) and (11) we get
Thus, for ϕ = 0, which corresponds to a boundary displacement parallel to the interface, the effective mass and dissipation disappears, while the maximum will occur for a displacement in the normal direction. It must be noted that the presence of any defect in the texture on the boundary or a different equilibrium configuration of the texture will change this prediction, but nevertheless we expect that there should be preferred directions for the effective mass and the dissipation.
The oscillating A-B interface
We can apply the model to an oscillating A-B phase interface. The dynamics of such an interface is particularly interesting at low temperatures. It has been proposed that the interface has an effective mass and there is dissipation due to pair-breaking and Andreev scattering when it moves10. Indeed at higher interface velocities the pair-breaking has analogies with Schwinger pair-creation and the Unruh effect in particle physics25. It was found experimentally26 that the friction values of a rapid freely-advancing interface in low magnetic fields were consistent with theoretical estimates based on the Andreev scattering of thermal quasiparticle excitations27. However, in subsequent measurements in Lancaster in high magnetic fields and much lower temperatures28 the observed friction was found to be orders of magnitude greater than the theoretical predictions10,27,29. The measurements were made on an interface that was stabilized by a field gradient and which could be driven into controlled oscillation using shaped magnetic field profiles, at much lower temperatures where pair-breaking was expected to dominate the dissipation11. Furthermore, the dissipation showed non-linear behavior that appeared to depend on the frequency of the oscillations of the interface. It was pointed out that the motion of an oscillating A-B interface in high magnetic fields and at low temperatures should be dominated by the orbital viscosity and by a significant effective mass arising from the redistribution of thermal quasiparticle excitations confined in the B-phase order parameter texture14. The change of the surrounding texture and energies of thermal quasiparticles should contribute to the effective mass of the interface and also produce dissipation arising from the orbital viscosity13.
The motion of the interface can be described by27
where nAB the surface normal directed toward the B-phase, and \({\rm{\Delta }}{G}_{AB}=\mathrm{1/2}{\chi }_{AB}({B}_{c}^{2}-{B}^{2})\) the Gibbs energy difference per unit volume for the two phases with χAB being the difference in the magnetic susceptibilities of the A and B phases.
To simplify the calculations, we will again assume that the B-phase response to the changing position of the interface is instantaneous is and that the boundary remains flat during its motion. This last approximation is valid as long as the healing length ξB over which lB changes direction is smaller than the size of the boundary and the effect of the side walls in the form of a meniscus can be neglected. We note, that in the A-phase the preferred orientations of the orbital vector lA in the bulk and on the surface are the same, so the orbitropic effect does not manifest in the A-phase when the interface is moving along the direction of the magnetic field.
Under those conditions Eq. (9), after substituting dV = Adz with A the area of the interface, reads
We can estimate the integral in Eq. (16) by assuming that the angle θ changes exponentially from π/2 to zero over the textural healing length ξB, as given by Eq. (11). The integral of Eq. (16) then becomes:
The numerical evaluation of this integral, based on the texture configuration which minimises the bending energy and the magnetic free energy simultaneously, gives 1.2353/ξB instead.
Substituting Eqs (4) and (17) in Eq. (16) gives the following estimates for the friction coefficient
and the effective mass
So that the friction and mass parameters of Eq. (15) become m = ml and γ = γ0 + γl. The contribution γ0 comes from Andreev scattering and pair breaking10,27,29, or any dynamical friction with the walls.
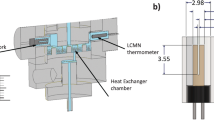
Let us now test the results on real experimental data, those plotted in Fig. 3. The experiment in which these data were taken is described in short in ref.11 and in more detail by Arrayás et al.14. Briefly, the measurements were performed on a sample of superfluid 3He contained in a sapphire tube, closed at one end and at the other end connected through an orifice to the inner cell of a Lancaster-style nuclear cooling stage. The volume inside the tube acts as a quasiparticle black-body radiator. Any dissipation in the superfluid contained in the tube generates an excess of quasiparticle excitations which are lost through the orifice to the bulk superfluid outside. From the temperature (≡ quasiparticle density) measured inside and outside the radiator volume we can deduce the energy flux flowing out of the orifice, which provides a very accurate measure of the dissipation in the radiator volume. (These devices are remarkable sensitive being able to detect energy inputs on the 10−16 W level.) The sapphire tube has internal diameter 4.3 mm and length 44 mm. The experiments were carried out at a pressure of 0 bar. A solenoid stack was used to create a shaped magnetic field profile to stabilize the A-phase in the bottom of the tube in fields above the transition field Bc = 340 mT28,30,31, whilst maintaining the top of the tube in the low field B-phase. Once the A-B interface was established across the tube, a small additional alternating field was applied to oscillate the interface vertically over a range of frequencies.

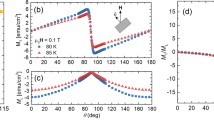
Dissipation of the oscillating A-B interface versus frequency. The points show measurements at a field oscillation amplitude of Bac = 0.643 mT for three different field gradients 2.00, 1.00 and 0.53 T/m, and Bac = 0.214 mT for the gradient 1.00 T/m. The lines are fits to the model (see text). The inset table summarizes the results of the fits. The temperature varies from 150 to 160 μK over a single set of measurements, rising slowly as the dissipation increases with increasing frequency. Measurements are only possible up to around 100 Hz, beyond which the dissipation becomes too high to stabilise the temperature.
To evaluate γl and ml for the experimental data in Fig. 3 we took the following values: \(\hslash {\tilde{\omega }}_{L}=0.67{{\rm{\Delta }}}_{0}\), from20,21,22; Δ0 = 1.76kBTc with Tc = 0.929 mK at 0 bar pressure, from32; N(0) = 1.0 × 1051 J−1m−3, from32,33; and T = 155 μK (noting that this is an average temperature, and the actual temperature during the measurements varied from T = 150 μK to T = 160 μK as the dissipation increased from low to high frequencies). We assume ξB = 0.1 mm, using some estimations for fields close to Bc17,18,34,35.
The only unknown parameters in our model are the quasiparticle relaxation time τ and the frequency independent dissipation term γ0, which is an additive term to γl in (18). The model predictions are shown together with the experimental data in Fig. 3. We have found that two values of τ on the order of tens of milliseconds are needed to fit the experimental data, depending on the magnitude of the driving magnetic field. The value for τ calculated for the uniform texture and for the given experimental conditions is only a few milliseconds36. With the texture bending, the quasiparticles may become trapped within the texture, which would increase their relaxation time. In the case of the dissipation parameter γ0, two different values are needed as well to successfully fit the measured dependence. The values of γ0 roughly scale as the amplitudes of the driving field (their ratio being about 3). For the set of experimental data in the case of the 214μT drive, we have also considered the fitting with no extra constant dissipation. The lack of experimental data at higher frequencies prevents us from drawing further conclusions. We remark that texture bending could be a function of the driving amplitude and remains to be further investigated.
Discussion
The data we fit are shown in Fig. 3 which are those reported in refs11,14. To model the double-plateau profile of the data as a driven damped harmonic oscillator, the effective mass and the dissipative coefficient must be frequency dependent, as shown by Eqs (18) and (19). As can be seen the model reproduces the principal features of the measured data. It follows the double-plateau form reasonably well. Unfortunately, the data taken at 214 μT do not extend to high enough temperature for the upper plateau to be reached at this drive amplitude.
We should emphasise that the double-plateau profile is certainly real and not associated with any saturation effect from heating by the moving boundary. In other similar measurements we certainly see no temperature gradients in the cells which would imply heating at this point.
The data are of great interest, and especially because the dissipation is so much higher than would be naively expected without taking into account the response of the orbital moment which we model here, which can be seen from the way the ideas of how to deal with the data have evolved. In ref.11 we followed the then current wisdom that these effects were the result of Andreev reflection, but a simple linear friction fit on that basis simply did not reproduce the observed data. In ref.14 we had understood that the effect arose from orbital precession of some sort and managed to achieve a more realistic fit, albeit for a very restricted version of the interface. The current model now reproduces the features of the system rather well and is completely general for all configurations of the interface. When the original measurements were made, the high dissipation turned out to be a nuisance as we had no idea what we were actually seeing. Now that we have a clearer understanding of the contributing processes, this would be a good time to revisit the experiment but now with a clearer view of the contribution of the orbital evolution. In future experiments the orbitropic effect can also be studied in other, less complicated situations. For example, in a magnetic field in the vicinity of a thin superconducting wire carrying alternating current. The magnetic field generated by this current will reorient the texture in 3He-B, thus causing dissipation (the magnetic field on the surface of a 0.1 mm thick wire carrying 1A is 4 mT and the field gradient is 80 T/m).
We would also like to comment on the results of a recent paper concerning the motion of the A-B interface37. The paper predicts a very peculiar form of a magnetic wave that can be excited at the interface: as the two superfluid phases have different magnetic susceptibilities, the phase transition between them is accompanied by a change in magnetisation. The author estimates that the effective inertia of such a wave is not large enough for the wave to be excited in a typical experiment. However, the orbitropic effect will endow the wave with a high value of the effective mass: at the resonant frequency of the wave (fres = 220 Hz for typical experimental conditions) our calculation (19) gives ml = 8.5 × 10−7 kg/m2 which is about 100 times greater than that predicted in37. As a result, the dissipation rate of 35 s−1 is small compared to 2πfres and makes the observation of the magnetic phase wave more realistic.
In conclusion, in this work we have considered a new dissipation mechanism based on the redistribution of thermal quasiparticles in the orbital texture. We have investigated its effect at the boundaries of the B-phase, and studied the consequences of the change of the nutation angle of the orbital vector lB. We have estimated the effective mass and dissipation associated with this motion, assuming adiabatic approximation of the influence of the orbital dynamics on the boundary dynamics. The main result is expressed in Eq. (9). Further, we have applied the theory developed to the dynamics of an oscillating A-B interface. The results are in a reasonable agreement with the experimental data and explain the increase in dissipation for frequencies above 2 Hz which could not be explained by existing theories.
Data Availability
All data used in this paper are available at https://doi.org/10.17635/lancaster/researchdata/239, including descriptions of the data sets.
References
Osheroff, D. D., Richardson, R. C. & Lee, D. M. Evidence for a new Phase of solid 3He. Phys. Rev. Lett. 28, 885 (1972).
Anderson, M. H., Ensher, J. R., Matthews, M. R., Wiemna, C. E. & Cornell, E. A. Observation of Bose-Einstein condensation in a dilute atomic vapour. Science 269, 198–201 (1995).
Davis, K. et al. Bose-Einstein condensation in a gas of sodium atoms. Phys. Rev. Lett. 75, 3969–3973 (1995).
Kasprzak, J. et al. Bose-Einstein condensation of exciton polaritons. Nature 443, 409–414 (2006).
Nikuni, T., Oshikawa, M., Oosawa, A. & Tanaka, H. Bose-Einstein condensation of dilute magnons in TlCuCl3. Phys. Rev. Lett. 84, 5868–5871 (2000).
Bunkov, Y. M. & Volovik, G. E. Magnon condensation into a Q ball in 3He-B. Phys. Rev. Lett. 98, 265302 (2007).
Page, D., Prakash, M., Lattimer, J. M. & Steiner, A. W. Rapid cooling in Cassiopeia A triggered by neutron superfluidity in dense matter. Phys. Rev. Lett. 106, 081101 (2011).
London, F. Superfluids, Vol 1 and 2 (Dover, 1950).
Tilley, D. R. & Tilley, J. Superfluidity and superconductivity (IOP, 1990).
Leggett, A. J. & Yip, S. K. Nucleation and growth of 3He-B in the supercooled A-phase. In: Helium 3, W.P. Halperin and L. P. Pitaevskii (Eds.), North Holland, Amsterdam (1990).
Bartkowiak, M. et al. Forced oscillation of the A-B phase boundary in superfluid 3He. Physica B 284, 240–241 (2000).
Vollhardt, D. & Wölfle, P. The Superfluid Phases of Helium 3, Taylor & Francis (1990).
Fisher, S. N. & Suramlishvili, N. Orbital viscosity in superfluid 3He-B in a magnetic field. J. Low Temp. Phys. 138, 771–776 (2005).
Arrayás, M., Fisher, S. N., Haley, R. P., Pickett, G. R. & Skyba, M. Orbital damping of the oscillating superfluid 3He AB interface at low temperatures. J. Low Temp. Phys. 175, 706–717 (2014).
Brinkman, W. F., Smith, H., Osheroff, D. D. & Blount, E. I. Anisotropy in the B phase of 3He. Phys. Rev. Lett. 33, 624–627 (1974).
Smith, H., Brinkman, W. F. & Engelsberg, S. Textures and NMR in superfluid 3He-B. Phys. Rev. B 15, 199–213 (1977).
Hakonen, P. J. et al. NMR and axial magnetic field textures in stationary and rotating superfluid 3He-B. J. Low Temp. Phys. 76, 225–283 (1989).
Thuneberg, E. V. A-B interface of superfluid 3He in a magnetic field. Phys. Rev. B 44, 9685 (1991).
Schopohl, N. Magnetic field dependence of the leggett angle, the susceptibility, and the longitudinal nuclear magnetic resonance of 3He-B. J. Low Temp. Phys. 49, 347–367 (1982).
Ashida, M. & Nagai, K. A.-B. transition of superfluid 3He under magnetic field at low pressures. Prog. Theor. Phys 74, 949 (1985).
Nagai, K. Private communication.
Fisher, S. N. The mechanical properties of superfluids 3He-A and 3He-B in the ballistic regime. PhD thesis, Lancaster (1991).
Cross, M. C. Orbital dynamics of Anderson-Brinkman-Morel phase of superfluid 3He. J. Low Temp. Phys. 26, 165–191 (1977).
Brinkman, W. F. & Cross, M. C. Spin and orbital dynamics of superfluid 3He. In: Progress in Low Temperature Physics, D. F. Brewer (Ed.), Elsevier (1978).
Schopohl, N. & Volovik, G. E. Schwinger pair production in the orbital dynamics of 3He-B. An. of Phys. 215, 372–385 (1992).
Buchanan, D. S., Swift, G. W. & Wheatley, J. C. Velocity of propagation of the 3He A-B interface in hypercooled 3He-A. Phys. Rev. Lett. 57, 341–344 (1986).
Yip, S. & Leggett, A. J. Dynamics of the 3He A-B phase boundary. Phys. Rev. Lett. 57, 345–348 (1986).
Bartkowiak, M. et al. The thermodynamics of the A-B transition in superfluid 3He as a probe of the A-phase gap node geometry. Physica B 280, 108–111 (2000).
Kopnin, N. Movement of the interface between the A and B phases in superfluid 3He: linear theory. Sov. Phys. JETP 65, 1187–1192 (1987).
Bartkowiak, M. et al. Thermodynamics of the A-B phase transition and the geometry of the A-phase gap nodes in superfluid 3He at low temperatures. Phys. Rev. Lett. 83, 3462–3465 (1999).
Hahn, I., Tang, Y. H., Bozler, H. M. & Gould, C. M. Phase-diagram of the A-B transition of superfluid 3He. Physica B 194, 815–816 (1994).
Greywall, D. S. 3He specific heat and thermometry at millikelvin temperatures. Phys. Rev. B 33, 7520–7538 (1986).
Wheatley, J. C. Experimental properties of superfluid 3He. Rev. Mod. Phys. 47, 415–470 (1975).
Alles, H. et al. Evidence for superfluid B phase of 3He in aerogel. Phys. Rev. Lett. 83, 1367–1370 (1999).
Ishikawa, O., Sasaki, Y., Mizusaki, T., Hirai, A. & Tsubota, M. Spin dynamics of superfluid 3He-B in a slab geometry. J. Low Temp. Phys. 75, 35–58 (1989).
Einzel, D. & Wölfle, P. Transport and relaxation properties of superfluid 3He. I. Kinetic equation and Bogoliubov quasiparticle relaxation rate. J. Low Temp. Phys. 32, 19–37 (1978).
Todoshchenko, I. Massless surface waves between two different superfluid phases of 3He. Phys. Rev. B 93, 134509 (2016).
Acknowledgements
This research is supported by the UK EPSRC, grant number EP/P024203/1, and by the FP7 Programme MICROKELVIN, Project no 228464. M. Arrayás is also supported by Spanish Ministerio de Economa y Competitividad, under project ESP2015-69909-C5-4-R. We acknowledge the late S.N. Fisher for his contribution to the early stages of this work.
Author information
Authors and Affiliations
Contributions
M.A., R.P.H. and D.Z. developed the theory. R.P.H. and G.R.P. designed the experiments, performed measurements and made a preliminary analysis of the results. D.Z. performed further analysis and simulations. M.A. and D.Z. drafted the manuscript. All authors discussed the results and implications, and commented on the manuscript at all stages.
Corresponding author
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Arrayás, M., Haley, R.P., Pickett, G.R. et al. Orbitropic Effect in Superfluid 3He B-phase Boundaries. Sci Rep 8, 13965 (2018). https://doi.org/10.1038/s41598-018-31407-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-018-31407-4
Keywords
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
