
Abstract
From stadium covers to solar sails, we rely on deployability for the design of large-scale structures that can quickly compress to a fraction of their size1,2,3,4. Historically, two main strategies have been used to design deployable systems. The first and most frequently used approach involves mechanisms comprising interconnected bar elements, which can synchronously expand and retract5,6,7, occasionally locking in place through bistable elements8,9. The second strategy makes use of inflatable membranes that morph into target shapes by means of a single pressure input10,11,12. Neither strategy, however, can be readily used to provide an enclosed domain that is able to lock in place after deployment: the integration of a protective covering in linkage-based constructions is challenging and pneumatic systems require a constant applied pressure to keep their expanded shape13,14,15. Here we draw inspiration from origami—the Japanese art of paper folding—to design rigid-walled deployable structures that are multistable and inflatable. Guided by geometric analyses and experiments, we create a library of bistable origami shapes that can be deployed through a single fluidic pressure input. We then combine these units to build functional structures at the metre scale, such as arches and emergency shelters, providing a direct route for building large-scale inflatable systems that lock in place after deployment and offer a robust enclosure through their stiff faces.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$29.99 / 30 days
cancel any time
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout




Similar content being viewed by others


Data availability
The datasets generated or analysed during the current study are available from the corresponding author on reasonable request.
Code availability
The code generated during the current study is available from the corresponding author on reasonable request.
References
Pellegrino, S. Deployable Structures in Engineering (Springer-Verlag, 2014).
You, Z. & Pellegrino, S. Foldable bar structures. Int. J. Solids Struct. 34, 1825–1847 (1997).
Liu, Y., Du, H., Liu, L. & Leng, J. Shape memory polymers and their composites in aerospace applications: a review. Smart Mater. Struct. 23, 023001 (2014).
Puig, L., Barton, A. & Rando, N. A review on large deployable structures for astrophysics missions. Acta Astron. 67, 12–26 (2010).
Zhao, J.-S., Chu, F. & Feng, Z.-J. The mechanism theory and application of deployable structures based on SLE. Mech. Mach. Theory, 44, 324–335 (2009).
Mira, L. A., Thrall, A. P. & De Temmerman, N. Deployable scissor arch for transitional shelters. Autom. Constr. 43, 123–131 (2014).
Thrall, A. P., Adriaenssens, S., Paya-Zaforteza, I. & Zoli, T. P. Linkage-based movable bridges: design methodology and three novel forms. Eng. Struct. 37, 214–223 (2012).
Arnouts, L. I. W., Massart, T. J., De Temmerman, N. & Berke, P. Structural optimisation of a bistable deployable scissor module. In Proc. IASS Annual Symposium 2019—Structural Membranes 2019 (eds Lázaro, C. et al.) (2019).
García-Mora, C. J. & Sánchez-Sánchez, J. Geometric method to design bistable and non—bistable deployable structures of straight scissors based on the convergence surface. Mech. Mach. Theory 146, 103720 (2020).
Cadogan, D., Stein, J. & Grahne, M. Inflatable composite habitat structures for lunar and Mars exploration. Acta Astron. 44, 399–406 (1999).
Block, J., Straubel, M. & Wiedemann, M. Ultralight deployable booms for solar sails and other large gossamer structures in space. Acta Astron. 68, 984–992 (2011).
Sifert, E., Reyssat, E., Bico, J. & Roman, B. Programming stiff inflatable shells from planar patterned fabrics. Soft Matter 16, 7898–7903 (2020).
Siéfert, E., Reyssat, E., Bico, J. & Roman, B. Bio-inspired pneumatic shape-morphing elastomers. Nat. Mater. 18, 16692–16696 (2019).
Usevitch, N. S. et al. An untethered isoperimetric soft robot. Sci. Robot. 5, eaaz0492 (2020).
Skouras, M. et al. Designing inflatable structures. ACM Trans. Graph. 33, 63 (2014).
Rus, D. & Tolley, M. T. Design, fabrication and control of origami robots. Nat. Rev. Mater. 3, 101–112 (2018).
Onal, C. D., Wood, R. J. & Rus, D. An origami-inspired approach to worm robots. IEEE ASME Trans. Mechatron. 18, 430–438 (2013).
Onal, C. D., Tolley, M. T., Wood, R. J. & Rus, D. Origami-inspired printed robots. IEEE ASME Trans. Mechatron. 20, 2214–2221 (2015).
Li, S. et al. A vacuum-driven origami “magic-ball” soft gripper. In 2019 International Conference on Robotics and Automation (ICRA) 7401–7408 (IEEE, 2019).
Miskin, M. Z. et al. Graphene-based bimorphs for micron-sized, autonomous origami machines. Proc. Natl Acad. Sci. USA 115, 466–470 (2018).
Silverberg, J. L. et al. Using origami design principles to fold reprogrammable mechanical metamaterials. Science 345, 647–650 (2014).
Dudte, L. H., Vouga, E., Tachi, T. & Mahadevan, L. Programming curvature using origami tessellations. Nat. Mater. 15, 583–588 (2016).
Filipov, E. T., Tachi, T. & Paulino, G. H. Origami tubes assembled into stiff, yet reconfigurable structures and metamaterials. Proc. Natl Acad. Sci. USA 112, 12321–12326 (2015).
Overvelde, J. T. B., Weaver, J. C., Hoberman, C. & Bertoldi, K. Rational design of reconfigurable prismatic architected materials. Nature 541, 347–352 (2017).
Iniguez-Rabago, A., Li, Y. & Overvelde, J. T. B. Exploring multistability in prismatic metamaterials through local actuation. Nat. Commun. 10, 5577 (2019).
Seymour, K. et al. Origami-based deployable ballistic barrier. In Proc. 7th International Meeting on Origami in Science Mathematics and Education 763–778 (2018).
Del Grosso, A. & Basso, P. Adaptive building skin structures. Smart Mater. Struct. 19, 124011 (2010).
Tachi, T. in Origami 5 (eds Wang-Iverson, P. et al.) Ch. 20 (CRC Press, 2011).
Zirbel, S. A. et al. Accommodating thickness in origami-based deployable arrays. J. Mech. Des. 135, 111005 (2013).
You, Z. & Cole, N. Self-locking bi-stable deployable booms. In 47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference AIAA 2006-1685 (ARC, 2006); https://arc.aiaa.org/doi/abs/10.2514/6.2006-1685.
Lang., R. J. A computational algorithm for origami design. In Proc. 12th Annual ACM Symposium on Computational Geometry 98–105 (1996); https://ci.nii.ac.jp/naid/80009084712/en/.
Demaine, E. D. & Mitchell, J. S. B. Reaching folded states of a rectangular piece of paper. In Proc. 13th Canadian Conference on Computational Geometry (CCCG 2001) 73–75 (2001).
Demaine, E. D. & Tachi, T. Origamizer: a practical algorithm for folding any polyhedron. In Proc. 33rd International Symposium on Computational Geometry (SoCG 2017) 34:1–34:15 (2017).
Martinez, R. V., Fish, C. R., Chen, X. & Whitesides, G. M. Elastomeric origami: programmable paper-elastomer composites as pneumatic actuators. Adv. Funct. Mater. 22, 1376–1384 (2012).
Li, S., Vogt, D. M., Rus, D. & Wood, R. J. Fluid-driven origami-inspired artificial muscles. Proc. Natl Acad. Sci. USA 114, 13132–13137 (2017).
Kim, W. et al. Bioinspired dual-morphing stretchable origami. Sci. Robot. 4, eaay3493 (2019).
Kamrava, S., Mousanezhad, D., Ebrahimi, H., Ghosh, R. & Vaziri, A. Origami-based cellular metamaterial with auxetic, bistable, and self-locking properties. Sci. Rep. 7, 46046 (2017).
Hanna, B., Lund, J., Lang, R., Magleby, S. & Howell, L. Waterbomb base: a symmetric single-vertex bistable origami mechanism. Smart Mater. Struct. 23, 094009 (2014).
Cai, J., Deng, X., Ya, Z., Jian, F. & Tu, Y. Bistable behavior of the cylindrical origami structure with Kresling pattern. J. Mech. Des. 137, 061406 (2015).
Silverberg, J. L. et al. Origami structures with a critical transition to bistability arising from hidden degrees of freedom. Nat. Mater. 14, 389–393 (2015).
Waitukaitis, S., Menaut, R., Gin-ge Chen, B. & van Hecke, M. Origami multistability: from single vertices to metasheets. Phys. Rev. Lett. 114, 055503 (2015).
Yasuda, H. & Yang, J. Reentrant origami-based metamaterials with negative Poisson’s ratio and bistability. Phys. Rev. Lett. 114, 185502 (2015).
Reid, A., Lechenault, F., Rica, S. & Adda-Bedia, M. Geometry and design of origami bellows with tunable response. Phys. Rev. E 95, 013002 (2017).
Faber, J. A., Arrieta, A. F. & Studart, A. R. Bioinspired spring origami. Science 359, 1386–1391 (2018).
Dolciani, M. P., Donnelly, A. J. & Jurgensen, R. C. Modern Geometry, Structure and Method (Houghton Mifflin, 1963).
Connelly, R. The rigidity of polyhedral surfaces. Math. Mag. 52, 275–283 (1979).
Connelly, R., Sabitov, I. & Walz, A. The bellows conjecture. Contrib. Algebr. Geom. 38, 1–10 (1997).
Mackenzie, D. Polyhedra can bend but not breathe. Science 279, 1637–1637 (1998).
Chen, Y., Feng, H., Ma, J., Peng, R. & You, Z. Symmetric waterbomb origami. Proc. R. Soc. A 472, 20150846 (2016).
Paulino, G. H. & Liu. K. Nonlinear mechanics of non-rigid origami: an efficient computational approach. Proc. R. Soc. A 473, 20170348 (2017).
Acknowledgements
We thank E. Demaine, J. Ku, T. Tachi and Yunfang Yang for insightful discussions; S. Lindner-Liaw, M. Bhattacharya and M. Starkey for assistance in the fabrication of the centimetre-scale and large-scale structures; and A. E. Forte for his valuable comments and suggestions on the manuscript. This research was supported by NSF through the Harvard University Materials Research Science and Engineering Center grant number DMR-1420570 and DMREF grant number DMR-1922321, as well as the Fund for Scientific Research-Flanders (FWO).
Author information
Authors and Affiliations
Contributions
D.M., B.G., C.H. and K.B. proposed and developed the research idea. D.M. conducted the numerical calculations. D.M., B.G. and C.J.G.-M. designed and fabricated the centimetre-scale and metre-scale structures. D.M. performed the experiments. D.M., B.G. and K.B. wrote the paper. K.B. supervised the research.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Peer review information Nature thanks Larry Howell, Glaucio Paulino and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Peer reviewer reports are available.
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Supplementary Information
This file contains Supplementary Information, including Supplementary Figures 1-30 and additional references.
Supplementary Video 1
Fabrication of centimetre-scale structures. To realize centimetre-scale structures, we use two different methods based on cardboard and 3D-printed faces. In the first method, we assemble laser-cut cardboard facets with double-sided adhesive tape to form the hinges. In the second approach, we connect 3D-printed faces with flexible laser-cut sheets to form the hinges and coat the structures with a thin layer of silicone rubber to create an airtight cavity.
Supplementary Video 2
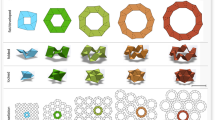
Inflatable and bistable origami shapes. In an attempt to design inflatable origami structures with flat and expanded stable configurations, we create a library of shapes realized by assembling two different triangles.
Supplementary Video 3
Multistable inflatable origami structures at the metre-scale. By combining our library of bistable origami shapes, we build metre-scale structures that (i) transform from a compact shape to an expanded one; (ii) deploy and retract through a single pressure input; (iii) harness multistability to lock in place after deployment; and (iv) provide a robust enclosure through their stiff faces.
Supplementary Video 4
Fabrication of the metre-scale shelter. The metre-scale shelter is fabricated out of 8 ft × 4 ft, 4-mm-thick, corrugated plastic sheets. We use a digital cutting system to cut the different parts of the shelter and pattern the hinges by scoring the sheets to reduce the thickness locally. To create an inflatable cavity, we connect the cut parts with adhesive tape.
Rights and permissions
About this article

Cite this article
Melancon, D., Gorissen, B., García-Mora, C.J. et al. Multistable inflatable origami structures at the metre scale. Nature 592, 545–550 (2021). https://doi.org/10.1038/s41586-021-03407-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/s41586-021-03407-4
This article is cited by
-
Large-scale modular and uniformly thick origami-inspired adaptable and load-carrying structures
Nature Communications (2024)
-
Electrothermally controlled origami fabricated by 4D printing of continuous fiber-reinforced composites
Nature Communications (2024)
-
Integrated mechanical computing for autonomous soft machines
Nature Communications (2024)
-
Self-locking Kirigami surfaces via controlled stretching
Communications Engineering (2024)
-
Zero modes activation to reconcile floppiness, rigidity, and multistability into an all-in-one class of reprogrammable metamaterials
Nature Communications (2024)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
