
Abstract
Defining and measuring the error of a measurement is one of the most fundamental activities in experimental science. However, quantum theory shows a peculiar difficulty in extending the classical notion of root-mean-square (rms) error to quantum measurements. A straightforward generalization based on the noise-operator was used to reformulate Heisenberg’s uncertainty relation on the accuracy of simultaneous measurements to be universally valid and made the conventional formulation testable to observe its violation. Recently, its reliability was examined based on an anomaly that the error vanishes for some inaccurate measurements, in which the meter does not commute with the measured observable. Here, we propose an improved definition for a quantum generalization of the classical rms error, which is state-dependent, operationally definable, and perfectly characterizes accurate measurements. Moreover, it is shown that the new notion maintains the previously obtained universally valid uncertainty relations and their experimental confirmations without changing their forms and interpretations, in contrast to a prevailing view that a state-dependent formulation for measurement uncertainty relation is not tenable.
Similar content being viewed by others

Introduction
The notion of the mean error of a measurement of a classical physical quantity was first introduced by Laplace1 (p. 324) as the mean of the absolute value of the error. Subsequently, the root-mean-square (rms) error was introduced by Gauss2 (p. 39) as a mathematically more tractable definition to derive the principle of the least square, and has been broadly accepted as the standard definition for the mean error of a measurement. In those approaches the error of a measurement of a quantity Θ is defined as N = Ω − Θ, where Ω is the quantity actually observed, here we call the meter quantity. Then Gauss’s rms error is defined as 〈N2〉1/2, where \(\langle \cdots \rangle\) stands for the mean value, while Laplace’s mean error as 〈|N|〉. From the above definition, Gauss’s rms error εG is determined by the joint probability distribution
of Θ and Ω as
so that εG(μ) = 〈N2〉1/2, and it perfectly characterizes accurate measurements: εG(μ) = 0 if and only if Ω = Θ holds with probability 1, i.e., \({\sum} \{ \mu (\theta ,\omega )|\theta = \omega \} = 1\).
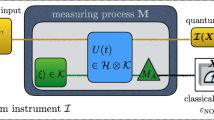
A straightforward generalization of Gauss’s definition to quantum measurements has been introduced as follows.3,4,5 Let A be an observable of a system S, described by a Hilbert space \({\cal H}\), to be measured by a measuring process M. Let M be an observable representing the meter of the observer in the environment E described by a Hilbert space \({\cal K}\). The Hilbert spaces \({\cal H}\) and \({\cal K}\) are supposed to be finite dimensional throughout the present paper for simplicity of the presentation, although the arguments supporting the main results are extended to the infinite dimensional case with well-known mathematical methods. The time evolution of the total system S + E during the measuring interaction with the total Hamiltonian H determines the Heisenberg operators A(0), M(τ) with 0 < τ, where
To obtain the outcome x of this measurement the observer measures the observable M(τ) (i.e., measures the meter observable M just after the interaction), instead of measuring A(0) (i.e., measuring A just before the interaction). The error of this measurement is naturally identified with the observable, called the noise operator, defined by
(refs. 6,7). Let |ψ〉 and |ξ〉 be the initial states of S and E, respectively. The noise-operator based quantum root-mean-square (q-rms) error of this measurement is defined as
This notion was used to reformulate Heisenberg’s uncertainty relation for the accuracy of simultaneous measurements to be universally valid8,9,10,11,12,13,14,15,16,17 and made the conventional formulation testable to observe its violation.18,19,20,21,22,23,24
Recently, Busch, Lahti, and Werner (BLW)25 raised a reliability problem for quantum generalizations of the classical rms error, comparing the noise-operator based q-rms error with the Wasserstein 2-distance, another error measure based on the distance between probability measures, and pointed out several discrepancies between those two error measures in favor of the latter.
In order to resolve the conflict, here we introduce the following requirements for any sensible error measure generalizing the classical root-mean-square error: (I) the operational definability, (II) the correspondence principle, (III) the soundness, and (IV) the completeness. The operational definability ensures that the error measure is definable by the operational description of the measuring process. The correspondence principle ensures that the error measure is consistent with the classical rms error in the case when the latter is also applicable. The soundness ensures that the error measure vanishes for any accurate measurements, while the completeness ensures that the error measure does not vanish for any inaccurate measurements. As shown later, the noise-operator based q-rms error εNO satisfies all the requirements (I)–(III) except (IV), whereas any error measures based on the distance of probability measures, such as the Wasserstein 2-distance, satisfy (I) and (III) but do not satisfy (II) nor (IV). We propose an improved definition for a quantum generalization of the classical rms error, which is still based on the noise operator but satisfies all requirements (I)–(IV). Moreover, it is shown that the new error measure maintains the previously obtained universally valid uncertainty relations8,9,10,11,12,13,14,15,16,17 and their experimental confirmations18,19,20,21,22,23,24 without changing their forms and interpretations, in contrast to a prevailing view that a state-dependent formulation for measurement uncertainty relation is not tenable.25,26,27
Results
Operational definability
The probability distribution of the output x of the measurement is given by
where PM(τ)(x) is the spectral projection of M(τ) for \(x \in {\Bbb R}\), i.e., PM(τ)(x) is the projection with range {|Ψ〉 ∈\({\cal H}\)⊗\({\cal K}\)| M(τ)|Ψ〉 = x|Ψ〉}. It is fairly well-known that every measuring process has its probability operator-valued measure (POVM) that operationally describes the statistics of the measurement outcome.28,29,30,31 The POVM Π of the measuring process M is a family \({\mathrm{{\Pi}}} = \{ {\mathrm{{\Pi}}}(x)\} _{x \in {\Bbb R}}\) of positive operators on \({\cal H}\) defined by
and satisfies the generalized Born formula
We consider the requirements for any quantum generalization ε of the classical root-mean-square error εG to quantify the mean error ε (A, M, |ψ〉) of the measurement of an observable A in a state |ψ〉 described by a measuring process M; we shall also write ε (A, M, ρ) if the state is represented by a density operator ρ. The first requirement is formulated using the notion of POVM as follows.
(I) Operational definability. The error measure ε should be definable by the POVM Π of the measuring process M, the observable A to be measured, and the initial state |ψ〉 of the measured system S.
The operational definability determines the mathematical domain of the error measure and requires that the mean error (i.e, the value of the error measure in the given state) should be determined by the operational description of the statistics of measurement outcomes.
The n-th moment operator \(\hat {\Pi}^{(n)}\) of the POVM Π is defined by
We write \({\hat{\mathrm {\Pi}}} = {\hat{\mathrm {\Pi}}}^{(1)}\). Then the relation
holds (ref. 11, Theorem 4.5).
Thus, εNO can be defined by the observable A, the POVM Π, and the state |ψ〉, so that it satisfies the operational definability. In what follows, we shall write εNO(A, Π, |ψ〉) = εNO(A, M, |ψ〉) if Π is the POVM of M.
Correspondence principle
The second requirement is based on a common practice in generalizing a classical notion to quantum mechanics. Even in quantum mechanics, there are cases where the original classical notions are directly applicable, and in those cases the generalized notions should be consistent with the original ones.
In the problem of generalizing the classical root-mean-square error to quantum mechanics, this principle is applied to the case where A(0) and M(τ) commute as two operators. In this case, the observables A(0) and \(M(\tau )\) are jointly measurable and their joint probability distribution μ(x, y) is given by
Then we can apply the classical definition of the root-mean-square error to the joint probability distribution μ to obtain the classical root-mean-square error εG(μ) of this measurement; in this case, the measuring process is classically described as a black-box with the input–output joint probability distribution μ(x, y). Thus, the quantum generalization ε should satisfy
Thus, we should require that Eq. (14) holds if A(0) and M(τ) commute. However, we should proceed further to avoid possible inconsistencies, since there is a case where a pair of observables commute only on a subspace and they have the joint probability distribution only for states in that subspace as discussed by von Neumann32 (p. 230). To include such a general situation, we define the notions of commutativity and joint probability distribution in a sate-dependent manner. We say that observables X and Y commute in a state |Ψ〉 if
for any x, y. A probability distribution μ(x, y) on \({\Bbb R}^2\), i.e., μ(x, y) ≥ 0 and \(\mathop {\sum}\nolimits_{x,y} \mu (x,y) = 1\), is called a joint probability distribution (JPD) of observables X, Y in |Ψ〉 if
for any polynomial f(X, Y) of observables X, Y. Then, there exists a JPD of observables X, Y in |ψ〉 if and only if X and Y commute in |ψ〉 as shown in Theorem 1 in Methods. In this case, the JPD μ is uniquely determined by
To prevent the inconsistency between the original classical notion and its quantum generalization we pose the following requirement.
(II) Correspondence principle. In the case where A(0) and M(τ) commute in the initial state |ψ, ξ〉, then the relation
should hold for the JPD μ of A(0) and M(τ) in |ψ, ξ〉.
Suppose that A(0) and M(τ) commute in |ψ, ξ〉. Let μ be their JPD in |ψ, ξ〉. From Eqs. (2), (7) and (16) we have
Thus, the noise-operator based q-rms error εNO satisfies the correspondence principle.
Soundness
To discuss the soundness we need to clarify what measuring process M is considered to accurately measure an observable A in a given state |ψ〉. This fundamental problem has, to the best of our knowledge, not been discussed in the literature except for our previous investigations,33,34,35,36 in which we introduced the following definition. We say that the measuring process M accurately measures an observable A in a state |ψ〉 if A(0) and M(τ) commute in |ψ, ξ〉 and their JPD μ satisfies μ(A(0) = M(τ)) = 1, where \(\mu (A(0) = M(\tau )) = \mathop {\sum}\nolimits_{x,y:x = y} \mu (x,y)\). We will provide a justification of this definition including its operational accessibility in Methods: state-dependent definition for accurate measurements of quantum observables.
Under the above definition we pose the soundness requirement.
(III) Soundness. The error measure ε should vanish for any accurate measurements.
Now, we can see that any error measure ε satisfying the correspondence principle, (II), also satisfies the soundness, (III), since in this case we have the JPD μ of A(0) and M(τ) satisfying ε (A, M, |ψ〉) = εG(μ) = 0.
Since the noise-operator based q-rms error εNO satisfies the correspondence principle, (II), it also satisfies the Soundness, (III).
Note that if A is accurately measured in |ψ〉, then A and Π are identically distributed in |ψ〉.
Completeness
Now, we introduce the following requirement.
(IV) Completeness. The measurement should be accurate if the error measure ε vanishes.
Busch, Heinonen, and Lahti37 (p. 263) pointed out that there is a measuring process M such that εNO(A, M, |ψ〉) = 0 but M does not accurately measure A in |ψ〉. For a simple example, let
with Π(y) = PM(y). Then we have εNO(A, Π, |ψ〉) = 0, but the measurement is not accurate, since A and Π are not identically distributed as 〈ψ|PA(2)|ψ〉 = 1/2 but 〈ψ|Π(2)|ψ〉 = 0.
Thus, the noise-operator based q-rms error εNO does not satisfy the completeness requirement. As shown above, the noise-operator based q-rms error εNO satisfies all the requirements (I)–(III) but does not satisfy (IV).
Locally uniform quantum root-mean-square error
We call any error measure ε satisfying (I) and (II) a quantum root-mean-square (q-rms) error. A q-rms error ε is said to be sound if it satisfies (III). It is said to be complete if it satisfies (IV). A sound and complete error measure correctly indicates the cases where the measurement is accurate and where not (Busch25, p. 1263). A primary purpose of this paper is to find a sound and complete q-rms error, and to establish universally valid uncertainty relations based on it.
We shall show that there is a simple method to strengthen the noise-operator based q-rms error to obtain a sound and complete q-rms error. In addition to (I)–(IV), this error measure is shown to have the following two properties.
(V) Dominating property. The error measure ε dominates the noise-operator based q-rms error εNO, i.e., εNO (A, Π, |ψ〉) ≤ ε (A, Π, |ψ〉) for all A, Π, |ψ〉.
(VI) Conservation property for dichotomic measurements. The error measure ε coincides with the noise-operator based q-rms error εNO for dichotomic measurements, i.e., εNO (A, Π, |ψ〉) = ε(A, Π, |ψ〉) if \(A^2 = {\hat{\mathrm {\Pi}}}^{(2)} = I\).
For any \(t \in {\Bbb R}\), define
We call \(\{ \varepsilon _t(A,{\Pi},|\Psi \rangle )\} _{t \in {\Bbb R}}\) the q-rms error profile for A and Π in |ψ〉. If A(0) and M(τ) commute in the state |ψ, ξ〉, then we have
for all \(t \in {\Bbb R}\). Thus, the q-rms error profile is considered to provide additional information about the error of measurement M in the case where A(0) and M(τ) do not commute in the state |ψ, ξ〉.
To obtain a numerical error measure from \(\{ \varepsilon _t(A,{\Pi},|\psi \rangle )\} _{t \in {\Bbb R}}\), we define the locally uniform q-rms error by
Then \(\bar \varepsilon\) is a sound and complete q-rms error, satisfying both the dominating property, (V), and the conservation property for dichotomic measurements, (VI), as shown in Theorem 3 in Methods: sound and complete quantum root-mean-square errors, where we introduce other two sorts of q-rms errors to clarify the physical motivation behind the above definition.
For the example given in Eq. (20), we have
despite of the relation εNO(A, Π, |ψ〉) = 0, the relation \(\bar \varepsilon (A,{\mathrm{{\Pi}}},|\psi \rangle ) = 2\) correctly indicate that the measurement of A described by Eq. (20) is not an accurate measurement.
Discussion
Wasserstein 2-distance
In what follows, we shall show that the Wasserstein 2-distance satisfies the operational definability, (I), and the soundness, (III), but does not satisfy the correspondence principle, (II), nor the completeness, (IV).
Let \(\mu _{|\psi \rangle }^A\,{\mathrm{and}}\,\mu _{|\psi \rangle }^{\Pi}\) be the probability distributions of A and Π in state |ψ〉, i.e.,
BLW25 advocated the Wasserstein 2-distance \(W_2\left( {\mu _{|\psi \rangle }^A,\mu _{|\psi \rangle }^{\mathrm{{\Pi}}}} \right)\) between \(\mu _{|\psi \rangle }^A\) and \(\mu _{|\psi \rangle }^{\Pi}\) as an alternative quantum generalization of the classical rms error in comparison with the noise-operator based q-rms error εNO(A, Π, |ψ〉). The Wasserstein 2-distance is defined as
where the infimum is taken over all the probability distributions γ(x, y) on \(\Bbb R^{2}\) such that \(\gamma ({x},{\Bbb {R}}) = \mu _{|{\psi} {\rangle}}^{A}(x)\) and \(\gamma ({\Bbb {R}},{y}) = \mu _{|{\psi} {\rangle} }^{\mathrm{{\Pi}}}(y)\), where we write \(\gamma ({x},{\Bbb R}) = \mathop {\sum}\nolimits_{{y}{\in}{\Bbb R}}\gamma ({x},{y})\) etc. Thus, \(W_{2}\left( {\mu _{|\psi \rangle }^{A},\mu _{|\psi \rangle }^{\mathrm{{\Pi}}}} \right)\) satisfies the operational definability, (I). It should be pointed out that the Wasserstein 2-distance \(W_{2}\left( {\mu _{|\psi \rangle }^{A},\mu _{|\psi \rangle }^{\mathrm{{\Pi}}}} \right)\) does not satisfy the correspondence principle, (II). To see this, suppose that A(0) and M(τ) commute in |ψ, ξ〉. In this case, we have
where Cov = 〈(A(0) − a)(M(τ) − m)〉, Bias = a − m, a = 〈A(0)〉, and m = 〈M(τ)〉. The JPD μ(x, y) always satisfies the condition that \(\mu (x,{\Bbb R}) = \mu _{|\psi \rangle }^A(x)\) and \(\mu ({\Bbb R},y) = \mu _{|\psi \rangle }^{\mathrm{{\Pi}}}(y)\). Thus, we have
For the case where \(\mu _{|\psi \rangle }^A = \mu _{|\psi \rangle }^{\mathrm{{\Pi}}}\), we have \(W_2(\mu _{|\psi \rangle }^A,\mu _{|\psi \rangle }^{\mathrm{{\Pi}}}) = 0\), but εG(μ) = 0 only if μ(A(0) = M(τ)) = 1. To consider a typical case where εG(μ) > 0, suppose that A(0) and M(τ) are independent. Then we have σ(A(0)) = σ(M(τ)), Cov = 0, and Bias = 0, and hence \(\varepsilon _G(\mu ) = \sqrt {2\sigma } (A)\). Thus, εG (μ) > 0 whenever σ (A) > 0. For instance, let
Then, we have the joint probability distribution μ for A(0) and M(τ) in |ψ, ξ〉 for arbitrary |ξ〉 such that
We have \(\mu _{|\psi \rangle }^A( + 1) = \mu _{|\psi \rangle }^{\mathrm{{\Pi}}}( + 1) = 1/3\), \(\mu _{|\psi \rangle }^A( - 1) = \mu _\psi ^{\mathrm{{\Pi}}}( - 1) = 2/3\), and A(0) and M(τ) are independent. Thus we have \(W_2(\mu _{|\psi \rangle }^A,\mu _{|\psi \rangle }^{\mathrm{{\Pi}}}) = 0\), but \(\sigma (A) = 2\sqrt 2 /3\) and εG(μ) = εNO(A, Π, |ψ〉) = 4/3. Thus, the Wasserstein 2-distance does not satisfy the correspondence principle, (II).
Note that the above example also shows that the Wasserstein 2-distance \(W_2(\mu _{|\psi \rangle }^A,\mu _{|\psi \rangle }^{\mathrm{{\Pi}}})\) does not satisfy the completeness, (IV), whereas it satisfies the soundness, (III), since εG(μ) = 0 holds in Eq. (29) for any accurate measurement.
The logical relationships among requirements (I)–(IV) are summarized as follows. Under the major premise (I), we have shown that (i) (III) follows from (II), (ii) (II) does not follow from (III), since the Wasserstein 2-distance satisfies (III) but does not satisfies (II), and that (iii) (II) and (IV) are independent, since εNO satisfies (II) but does not satisfy (IV) and since there exists an error measure ε satisfying (IV) but not satisfying (II), e.g. \(\varepsilon (A,{\Pi},|\psi \rangle ) = \sup_{|\phi \rangle }\varepsilon _{\mathrm{NO}}(A,{\Pi},|\phi \rangle )\), where |ϕ〉 varies over all the states. Note that there exists an error measure ε satisfying (I), (III), and (IV), but does not satisfy (II), e.g., \(\varepsilon (A,{\mathrm{{\Pi}}},|\psi \rangle ) = \sup_{|\phi \rangle }\varepsilon _{\mathrm{NO}}(A,{\mathrm{{\Pi}}},|\phi \rangle )\), where |ϕ〉 varies over the cyclic subspace \({\cal C}(A,|\psi \rangle )\) generated by A and |ψ〉.38
Universally valid uncertainty relations
In what follows, we shall show that all the universally valid measurement uncertainty relations obtained so far8,10,11,13,14,15,16 for the noise-operator based q-rms error εNO are maintained by the locally uniform q-rms error \(\bar \varepsilon\) with the same forms by property (V) and that their experimental confirmations reported so far18,19,20,21,22,23,24 for dichotomic measurements are also reinterpreted to confirm the relations for the new error measure \(\bar \varepsilon\) by property (VI). Moreover, the state-independent formulation based on this notion maintains Heisenberg’s original form for the measurement uncertainty relation, whereas the state-dependent formulation violates it. The new error measure \({\bar {\varepsilon}}\) thus clears a prevailing view that the state-dependent formulation of measurement uncertainty relations is not tenable.25,26,27
Let A, B be two observables of a quantum system S described by a Hilbert space \({\cal H}\). Any simultaneous measurement of A and B in a state |ψ〉 defines a joint POVM Π(x, y) on \({\Bbb R}^2\) for the Hilbert space \({\cal H}\), for which the marginal POVM \({\mathrm{{\Pi}}}_A(x) = {\mathrm{{\Pi}}}(x,{\Bbb R})\) describes the A-measurement and the marginal POVM \({\mathrm{{\Pi}}}_B(y) = {\mathrm{{\Pi}}}({\Bbb R},y)\) describes the B-measurement.12 Then the mean errors of the simultaneous measurement of A and B described by the joint POVM Π(x, y) in the state |ψ〉 are defined as ε(A, ΠA, |ψ〉) and ε(B, ΠB, |ψ〉), respectively, for a given q-rms error ε. In what follows we abbreviate ε(A) to ε(A, ΠA, |ψ〉) and ε(B) to ε(B, ΠB, |ψ〉) unless confusion may occur.
The above general formulation includes the error-disturbance relation for the A-measurement error of a measuring process M and the thereby caused disturbance on B, since the B-disturbance is generally defined by the error of the accurate B-measurement following the A-measurement.8,11,39 This definition of the B-disturbance is described in the Heisenberg picture as follows. Given a measuring process M, we can make an accurate simultaneous measurement of commuting observables M(τ) and B(τ). Then an approximate simultaneous measurement of A(0) and B(0) is obtained if the measurement of A(0) is replaced by the accurate measurement of M(τ) and the measurement of B(0) is replaced by the accurate measurement of B(τ). This simultaneous measurement is described by the joint POVM Π defined by
In this case, for a given q-rms error measure ε, we define the mean error ε(A, M, |ψ〉) of the A measurement carried out by M in |ψ〉 as ε(A, M, |ψ〉) = ε(A, ΠA, |ψ〉) and the mean disturbance η(B, M, |ψ〉) of B caused by M in |ψ〉 as η(B, M, |ψ〉) = ε(B, ΠB, |ψ〉). In what follows we abbreviate ε(A) to \(\varepsilon (A,{\mathbf{M}},|\psi \rangle )\) and η(B) to η(B, M, |ψ〉) unless confusion may occur.
As above, any general relation for ε(A) and ε(B) implies a general relation for ε(A) and η(B), while any counter example for a general relation for ε(A) and η(B) is also a counter example for the corresponding relation for ε(A) and ε(B).
In this respect, it should be noted that the recent claim by Korzekwa, Jennings, and Rudolph (KJR)27 of the impossibility of state-dependent error-disturbance relations is unfounded. In fact, KJR admitted that their basic assumption called the operational requirement (RO) should be applied to the notion of disturbance, but cannot be applied to the notion of error (KJR27, p. 052108-6); it can be easily seen that if (RO) were to be applied to the error, it would contradict the correspondence principle. However, such a discrimination between the disturbance and the error contradicts the above standard definition of the disturbance as the error of a successive measurement.
Heisenberg’s original formulation of the uncertainty principle states that canonically conjugate observables Q, P can be measured simultaneously only with a characteristic constraint (Heisenberg40, p. 172)
where the unambiguous lower bound \(\hbar /2\) is due to a subsequent elaboration by Kennard41 (see also ref. 42). Heisenberg justified this relation under the repeatability hypothesis or its approximate version, an obsolete assumption on the state change in measurement; see ref. 42 for a detailed discussion.
A counter example of Heisenberg’s relation (38) was given in ref. 43 in the error-disturbance scenario with ε = εNO, using a position measuring model originally constructed in ref. 44 to invalidate the standard quantum limit for gravitational-wave detectors with free-mass probe.45,46 In ref. 47 continuously many linear position measuring processes including the above have been constructed that violate Heisenberg’s relation (38) in the error-disturbance scenario for an arbitrary choice of the q-rms error ε. Thus, the violation of Heisenberg’s relation (38) is not due to a particular choice of the q-rms error ε.
In contrast to the violation of Eq. (38) in the state-dependent formulation, Appleby48 showed the relation
holds for ε = εNO, except for the case where \(\sup_{|\psi \rangle }\varepsilon_{\mathrm{NO}} (Q,{\mathrm{{\Pi}}}_Q,|\psi \rangle ) = 0\) or \(\sup_{|\psi \rangle }\varepsilon_{\mathrm{NO}} (P,{\mathrm{{\Pi}}}_P,|\psi \rangle ) = 0\), where the supremum is taken over all the possible states |ψ〉. An apparent drawback of the above relation is that the state-independent error measures \(\sup_{|\psi \rangle }\varepsilon_{\mathrm{NO}} (Q,{\mathrm{{\Pi}}}_Q,|\psi \rangle )\) and \(\sup_{|\psi \rangle }\varepsilon_{\mathrm{NO}} (P,{\mathrm{{\Pi}}}_P,|\psi \rangle )\) are defined by the q-rms error εNO that is not complete. However, this drawback turns out to be immediately cleared if one uses the locally uniform q-rms error \(\bar \varepsilon\) instead, since the relation
holds obviously for any observable X. Thus, Eq. (39) holds for \(\varepsilon = \bar \varepsilon\), one of the sound and complete q-rms errors. It should be noted that in the state-independent formulation as above the error measures \(\sup_{|\psi \rangle }\varepsilon (Q,{\mathrm{{\Pi}}}_Q,|\psi \rangle )\) and \(\sup_{|\psi \rangle }\varepsilon (P,{\mathrm{{\Pi}}}_P,|\psi \rangle )\) often diverges.47,48 Even in the original γ-ray thought experiment, the error measure \(\sup_{|\psi \rangle }\varepsilon (Q,{\mathrm{{\Pi}}}_Q,|\psi \rangle )\) diverges as the wave packet goes beyond the scope of the microscope. Thus, Heisenberg’s original form holds in the state-independent formulation but not due to the tradeoff between the resolution power and the Compton recoil. The notion of the resolution power of a microscope is well-defined only in the case where the object is well-localized in the scope of the microscope, and it cannot be captured by the state-independent formulation. The above remarks are also applied to the recent revival of the state-independent formulation by Busch, Lahti, and Werner;49,50 in fact, the Busch-Lahti-Werner formulation in ref. 49 is equivalent to Appleby’s formulation48 for any linear measurements.47 For detailed discussions, we refer the reader to ref. 47.
A generalization of Heisenberg’s relation (38) to arbitrary pair of observables A and B is obtained by using the noise-operator based rms error ε = εNO as the relation
where \(C_{A,B} = \frac{1}{2}|\langle \psi |[A,B]|\psi \rangle |\), holding for any joint POVMs with unbiased or independent noise operators3,4,6,7,10,51,52 (see also refs. 53,54). By the dominating property, (V), the above relation also holds for the locally uniform rms error \(\varepsilon = \bar \varepsilon\).
Using the noise-operator based q-rms error ε = εNO, the first universally valid relation
was given in 2003 (refs. 8,10), which is universally valid for any observables A,B, any system state |ψ〉, and any joint POVM Π, where the standard deviations σ(A), σ(B) are taken in the state |ψ〉. By the dominating property, (V), the above relation also holds for the locally uniform q-rms error \(\varepsilon = \bar \varepsilon\). Thus, we have a state-dependent universally valid uncertainty relation for simultaneous measurements described by a sound and complete q-rms error.
Using the noise-operator based q-rms error ε = εNO, Branciard15,16 considerably strengthened the above universally valid relation (42) as well as the relations proposed by Hall13 and by Weston, Hall, Palsson, and Wiseman14 in several ways. All those Branciard relations also hold for the locally uniform q-rms error \(\varepsilon = \bar \varepsilon\) by the dominating property, (V); see Branciard16 [Section IV] for the alternative forms of the above mentioned relations to which the dominating property can directly apply.
Those universally valid relations for the noise-operator based q-rms error have already been experimentally confirmed in the error-disturbance scenario for dichotomic measurements (i.e., A(0)2 = B(0)2 = M(τ)2 = B(τ)2 = I) with observing the violation of Eq. (41).18,19,20,21,22,23,24 Interestingly, the above experiments were intended to confirm relations for the noise-operator based q-rms error ε = εNO, but they also can be reinterpreted as confirmations for the corresponding relations and the violation of Eq. (41) with the locally uniform q-rms error \(\varepsilon = \bar \varepsilon\), one of sound and complete q-rms errors, since in those experiments we have \(\varepsilon _{\mathrm{NO}} = \bar \varepsilon\) by the conservation property for dichotomic measurements, (VI). Thus, we already have a well-developed theory of state-dependent measurement uncertainty relations based on a sound and complete q-rms error, in contrast to a prevailing claim that the state-dependent formulation of measurement uncertainty relations is not tenable.25,26,27
Methods
State-dependent commutativity and joint probability distributions
The state-dependent notion of commutativity was originally discussed by von Neumann32 (p. 230) as follows. Suppose that |Ψ〉 is a superposition of common eigenstates of X and Y, namely, there exists an orthonormal family {|x, y〉} of states such that X|x, y〉 = x|x, y〉, Y|x, y〉 = y|x, y〉, and that \(|{\mathrm{\Psi }}\rangle = \mathop {\sum}\nolimits_{x,y} |x,y\rangle \langle x,y|\Psi \rangle\). In this case, a measurement of the observable
with a one-to-one assignment of real values \((x,y) \mapsto z_{x,y}\) gives a joint measurement of X and Y in the state |Ψ〉 and their joint probability distribution μ(x, y) = Pr{X = x, Y = y} of X and Y is given by
In this case, X and Y commute on the subspace \({\cal M}\) spanned by {|x, y〉} but do not necessarily commute on \({\cal M}^ \bot\).
Then we have the following theorem.
Theorem 1. For any pair of observables X, Y and state |Ψ〉, the following conditions are all equivalent.
-
(i)
The state |Ψ〉 is a superposition of common eigenstates of X and Y.
-
(ii)
The observables X and Y commute in the state |Ψ〉, i.e., Eq. (15) holds for any x,y.
-
(iii)
There exists a JPD μ of X and Y in |Ψ〉, i.e., there exists a probability distribution μ(x, y) on \({\Bbb R}^2\) satisfying Eq. (16) for any polynomial f(X, Y) of observables X, Y.
-
(iv)
\(\mathop {\sum}\nolimits_{x,y} \langle {\mathrm{\Psi }}|P^X(x) \wedge P^Y(y)|\Psi \rangle = 1\), where ∧ stands for the infimum of two projections.
In this case, the JPD μ is uniquely determined by
Proof. The following proof is obtained by adapting the more general arguments previously given in refs. 34,35,36,55,56 to the case discussed here.
(i) ⇒ (iv): Suppose that |Ψ〉 is a superposition of common eigenstates of X and Y, namely, there exists an orthonormal family of states {|x, y〉} such that X|x, y〉 = x|x, y〉, Y|x, y〉 = y|x, y〉, and that \(|\Psi \rangle = \mathop {\sum}\nolimits_{x,y} |x,y\rangle \langle x,y|{\mathrm{\Psi }}\rangle\). Then we have
and hence (iv) holds.
(iv) ⇒ (ii): Let u,v∈\({\Bbb {R}}\). It is easy to see that
It follows from condition (iv) that
By symmetry we obtain
Thus, (ii) holds.
(ii) ⇒ (iii): Let
Then μ(x, y) ≥ 0 for all \(x,y \in {\Bbb R}\), since
by assumption, and \(\mathop {\sum}\nolimits_{x,y} \mu (x,y) = 1\). Let \(f(X,Y) = X^{n_1}Y^{m_1} \cdots X^{n_N}Y^{m_N}\) with 0 ≤ n1, m1,…, nN, mN. Then by assumption we have
Thus, we have
By linearity, the relation
holds for every polynomial f(X, Y).
(iii) ⇒ (i): Suppose that there exists a JPD μ(x, y) of X and Y in |Ψ〉. Let f(X), g(Y) be polynomials of X and Y. We have
and hence
Taking f(X), g(Y) as f(X) = PX(x) and g(Y) = PY(y), we have
so that X and Y commute in |Ψ〉. It follows that PX(x)PY(y)|Ψ〉 is a common eigenvector of X and Y if PX(x)PY(y)|Ψ〉 ≠ 0. It follows from \(|{\mathrm{\Psi }}\rangle = \mathop {\sum}\nolimits_{x,y} P^X(x)P^Y(y)|{\mathrm{\Psi }}\rangle\) that |Ψ〉 is a superposition of common eigenstate of X and Y.
Suppose that (i)–(iv) hold and let μ be a JPD of X, Y in |Ψ〉. Then
It follows that
From Eq. (16) we have
Since f(x, y) was arbitrary, we obtain
This completes the proof. QED
It should be noted that if
for all \(x,y \in {\Bbb R}\), then Eq. (45) defines a probability distribution μ(x, y) on \({\Bbb R}^2\) satisfying the marginal probability conditions:
However, Eq. (46) does not ensure that μ(x, y) satisfies Eq. (16), so that μ(x,y) is not necessarily a JPD of X and Y in |Ψ〉. In fact, let X = σx, Y = σy, and |Ψ〉 = |σx = + 1〉, where σx, σy are Pauli operators on \({\Bbb C}^2\). Let f(X, Y) = YXY. Then we have
Thus, Eq. (16) does not hold.
State-dependent definition for accurate measurements of quantum observables
To characterize accurate measurements of a quantum observable in a given state, here, we take two approaches, one based on classical correlation and the other based on quantum correlation, which will be eventually shown to be equivalent.
As discussed before, if A(0) and M(τ) commute in |ψ, ξ〉, there exists the JPD μ(x, y) of A(0) and M(τ) in |ψ, ξ〉, which describes the classical input-output correlation. Then according to the consistency with the classical description, the observable A is considered to be accurately measured if A(0) and M(τ) are perfectly correlated in their JPD μ, i.e., μ(A(0) = M(τ)) = 1. Thus, we reach the following condition for the measuring process M to accurately measure A in the state |ψ〉:
(S) A(0) and M(τ) commute in |ψ, ξ〉 and their JPD μ satisfies μ(A(0) = M(τ)) = 1.
In the second approach, we consider the weak joint distribution (WJD) ν(x, y) of A(0) and M(τ) in |ψ, ξ〉 defined by
From Theorem 1, if A(0) and M(τ) commute in |ψ, ξ〉, the WJD ν(x, y) coincides with the JPD μ(x, y) of A(0) and M(τ) in |ψ, ξ〉. The WJD always exists, and is operationally accessible by weak measurement and post-selection,57 but possibly takes negative or complex values. Then it is natural to consider the following condition:
(W) The WJD of A(0) and M(τ) in |ψ, ξ〉 satisfies ν(x, y) = 0 if x ≠ y.
Since the WJD is operationally accessible, condition (W) is also operationally accessible. Obviously, (W) is logically weaker than or equivalent to (S). If condition (S) holds, the measurement should be considered an accurate measurement for the consistency with the classical description. On the other hand, if the measurement is accurate, any operational test for the possible error should be passed. Observing the WJD is one of available tests for the accurate measurement, and it is natural to consider that the test is passed if ν (x, y) = 0 for all x, y with x ≠ y and that the test is failed, or the error is witnessed, if \(\nu (x,y)\not = 0\) for some x, y with x ≠ y; this type of test has been discussed in detail by Mir et al.58 and Garretson et al.59 in the context of witnessing momentum transfer in a which-way measurement. Thus, condition (W) should be satisfied by any accurate measurement, since a failure of (W), or a non-zero value of ν (x, y) for a pair (x, y) with x ≠ y, witnesses an error of the measurement.
Therefore, condition (S) is a sufficient condition for the measurement to be accurate, and condition (W) a necessary condition. The following theorem shows that both conditions are actually equivalent so that both of them are necessary and sufficient conditions for the measurement to be accurate.
Theorem 2. For any measuring process M, an observable A, and a state |ψ〉, condition (S) and condition (W) are equivalent.
Proof: The assertion was generally proved in refs. 33,34 after a lengthy argument. Here, we give a direct proof. Since (S) implies (W), it suffices to show the implication (W) ⇒ (S). Suppose that the WJD ν(x, y) of A(0) and M(τ) in |ψ, ξ〉 satisfies ν(x, y) = 0 if x ≠ y. Then
Consequently,
and
Thus,
It follows that A(0) and M(τ) commute in |ψ, ξ〉 and the condition in (S) holds. Thus the implication (W) ⇒ (S) follows. QED
Sound and complete quantum root-mean-square errors
In addition to the locally uniform q-rms error, here, we introduce the following two sorts of q-rms errors. For any invertible density function f, we define the f-distributed q-rms error εf by
For any invariant mean m on \({\Bbb R}\),60 define the m-distributed q-rms error εm by
Then we have the following theorem.
Theorem 3. The following statements hold.
-
(i)
The error measures \({\bar {\varepsilon}}\), εf, and εm are sound and complete q-rms errors.
-
(ii)
The error measure \({\bar {\varepsilon}}\) has the dominating property, (V).
-
(iii)
The error measures \({\bar {\varepsilon}}\), εf, and εm have the conservation property for dichotomic measurements, (VI).
-
(iv)
The relations
$$\varepsilon _{m} \le {\bar {\varepsilon}} ,\quad \sup_{f}{\varepsilon} _{f} = {\bar {\varepsilon}},$$hold for any invariant mean m, where f varies over all the invertible density functions.
-
(v)
The error measure εm satisfies the relation
if \(A = \mathop {\sum}\nolimits_n a_nP^A(a_n)\).
Proof. It is obvious from definition that \(\bar \varepsilon\) satisfies the operational definability, (I). From Eq. (22), \(\bar \varepsilon\) satisfies the correspondence principle, (II), and hence satisfies the soundness, (III). To prove the completeness, (IV), suppose \(\bar \varepsilon (A,{\mathrm{{\Pi}}},|\psi \rangle ) = 0\). Then we have
Since t was arbitrary, we have
for any {aj} and {tj}. By Fourier expansion, the set of operators \(\mathop {\sum}\nolimits_j a_je^{ - it_jA}\) includes all functions of A, so that we have
for all x ∈ \({\Bbb R}\). Thus, PA(x)|ψ〉|ξ〉 is a common eigenstate of M(τ) and A(0) for a common eigenvalue x, if PA(x)|ψ〉 ≠ 0, and \(|\psi \rangle |\xi \rangle = \mathop {\sum}\nolimits_x P^A(x)|\psi \rangle |\xi \rangle\) is a superposition of those common eigenstates of \(M(\tau )\) and A(0) with common eigenvalues. It follows from Theorem 3 in ref. 33 that condition (W) holds. Thus, \(\bar \varepsilon\) satisfies the completeness requirement (IV). Therefore, we conclude that \(\bar \varepsilon\) is a sound and complete q-rms error. The proofs for εf and εm are similar, and assertion (i) follows.
Assertion (ii) follows immediately from the definition.
To prove assertion (iii), suppose \(A^2 = \hat {\Pi}^{(2)} = I\). Let |ψt〉 = e-itA|ψ〉. We have the commutation relation
and hence
Thus, we have
Thus, assertion (iii) follows.
Assertion (iv) follows easily from the properties of integral and invariant mean.
Assertion (v) follows from Theorem 5.2 in ref. 60.
This completes the proof. QED
Consider a quantum system with single degree of freedom described by a pair of canonically conjugate observables Q, P prepared in a state \(|\phi \rangle\) such that |〈p|ϕ〉|2 = f(p). By the relation
the above definition of εf is equivalent to making the canonical approximate A-measurement with the Q-meter prepared in the state |ϕ〉 such that |〈p|ϕ〉|2 = f(p) in the P-basis before evaluating the noise-operator based q-rms error.61,62 The definition of εm is also equivalent to making the canonical approximate A-measurement with the Q-meter prepared in the m-Dirac state before evaluating the noise-operator based q-rms error.61 It is well-known that there is no canonical choice of f or m in general to achieve the ideal measurement of an arbitrary A.60,61 By Theorem 3 (iv), our definition for \(\bar \varepsilon\) is equivalent to
where f varies over all the invertible wave functions. Thus, although there is no canonical choice of f in general, the definition of \(\bar \varepsilon\) can be interpreted as choosing the most error-sensitive f among all the invertible wave functions f.
Data availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
References
Laplace, P. S. m. d. Théorie Analytique des Probabilités (Ve. Courcier, Paris, 1812).
Gauss, C. F. Theoria combinationis observationum erroribus minimis obnoxiae, pars prior (societati regiae exhibita, febr. 15, 1821). Commentationes Societatis Regiae Scientiarum Gottingensis Recentiores V (Classis Mathematicae), 33–62 (1819–1822). English translation: Theory of the Combination of Observations Least Subject to Errors: Part One, Part Two, Supplement (SIAM, Philadelphia, PA, 1995).
Ishikawa, S. Uncertainty relations in simultaneous measurements for arbitrary observables. Rep. Math. Phys. 29, 257–273 (1991).
Ozawa, M. In Quantum Aspects of Optical Communications, Lecture Notes in Physics 378 (eds Bendjaballah, C., Hirota, O. & Reynaud, S.), 3–17 (Springer, Berlin, 1991).
Braginsky, V. B. & Khalili, F. Y. Quantum Measurement (Cambridge UP, Cambridge, 1992).
Arthurs, E. & Kelly, J. L. Jr. On the simultaneous measurement of a pair of conjugate observables. Bell Syst. Tech. J. 44, 725–729 (1965).
Arthurs, E. & Goodman, M. S. Quantum correlations: a generalized Heisenberg uncertainty relation. Phys. Rev. Lett. 60, 2447–2449 (1988).
Ozawa, M. Universally valid reformulation of the Heisenberg uncertainty principle on noise and disturbance in measurement. Phys. Rev. A 67, 042105 (2003).
Ozawa, M. Physical content of Heisenberg’s uncertainty relation: limitation and reformulation. Phys. Lett. A 318, 21–29 (2003).
Ozawa, M. Uncertainty principle for quantum instruments and computing. Int. J. Quant. Inf. 1, 569–588 (2003).
Ozawa, M. Uncertainty relations for noise and disturbance in generalized quantum measurements. Ann. Phys. 311, 350–416 (2004).
Ozawa, M. Uncertainty relations for joint measurements of noncommuting observables. Phys. Lett. A 320, 367–374 (2004).
Hall, M. J. W. Prior information: how to circumvent the standard joint-measurement uncertainty relation. Phys. Rev. A 69, 052113 (2004).
Weston, M. M., Hall, M. J. W., Palsson, M. S., Wiseman, H. M. & Pryde, G. J. Experimental test of universal complementarity relations. Phys. Rev. Lett. 110, 220402 (2013).
Branciard, C. Error-tradeoff and error-disturbance relations for incompatible quantum measurements. Proc. Natl Acad. Sci. USA 110, 6742–6747 (2013).
Branciard, C. Deriving tight error-trade-off relations for approximate joint measurements of incompatible quantum observables. Phys. Rev. A 89, 022124 (2014).
Ozawa, M. Error-disturbance relations in mixed states. Preprint at https://arxiv.org/abs/1404.3388 (2014).
Erhart, J. et al. Experimental demonstration of a universally valid error-disturbance uncertainty relation in spin measurements. Nat. Phys. 8, 185–189 (2012).
Rozema, L. A. et al. Violation of Heisenberg’s measurement-disturbance relationship by weak measurements. Phys. Rev. Lett. 109, 100404 (2012).
Baek, S.-Y., Kaneda, F., Ozawa, M. & Edamatsu, K. Experimental violation and reformulation of the Heisenberg error-disturbance uncertainty relation. Sci. Rep. 3, 2221 (2013).
Ringbauer, M. et al. Experimental joint quantum measurements with minimum uncertainty. Phys. Rev. Lett. 112, 020401 (2014).
Sulyok, G. et al. Violation of Heisenberg’s error-disturbance uncertainty relation in neutron spin measurements. Phys. Rev. A 88, 022110 (2013).
Kaneda, F., Baek, S.-Y., Ozawa, M. & Edamatsu, K. Experimental test of error-disturbance uncertainty relations by weak measurement. Phys. Rev. Lett. 112, 020402 (2014).
Demirel, B., Sponar, S., Sulyok, G., Ozawa, M. & Hasegawa, Y. Experimental test of residual error-disturbance uncertainty relations for mixed spin-1/2 states. Phys. Rev. Lett. 117, 140402 (2016).
Busch, P., Lahti, P. & Werner, R. F. Colloquium: quantum root-mean-square error and measurement uncertainty relations. Rev. Mod. Phys. 86, 1261–1281 (2014).
Dressel, J. & Nori, F. Certainty in heisenberg’s uncertainty principle: revisiting definitions for estimation errors and disturbance. Phys. Rev. A 89, 022106 (2014).
Korzekwa, K., Jennings, D. & Rudolph, T. Operational constraints on state-dependent formulations of quantum error-disturbance trade-off relations. Phys. Rev. A 89, 052108 (2014).
Helstrom, C. W. Quantum Detection and Estimation Theory (Academic, New York, 1976).
Holevo, A. S. Probabilistic and Statistical Aspects of Quantum Theory (North-Holland, Amsterdam, 1982).
Davies, E. B. Quantum Theory of Open Systems (Academic, London, 1976).
Ozawa, M. Quantum measuring processes of continuous observables. J. Math. Phys. 25, 79–87 (1984).
von Neumann, J. Mathematical Foundations of Quantum Mechanics (Princeton UP, Princeton, NJ, 1955). [Originally published: Mathematische Grundlagen der Quantenmechanik] (Springer, Berlin, 1932).
Ozawa, M. Perfect correlations between noncommuting observables. Phys. Lett. A 335, 11–19 (2005).
Ozawa, M. Quantum perfect correlations. Ann. Phys. 321, 744–769 (2006).
Ozawa, M. Quantum reality and measurement: a quantum logical approach. Found. Phys. 41, 592–607 (2011).
Ozawa, M. Quantum set theory extending the standard probabilistic interpretation of quantum theory. New Gener. Comput. 34, 125–152 (2016).
Busch, P., Heinonen, T. & Lahti, P. Noise and disturbance in quantum measurement. Phys. Lett. A 320, 261–270 (2004).
Ozawa, M. In Quantum Information and Computation IV, Proc. SPIE 6244 (eds Donkor, E. J., Pirich, A. R. & Brandt, H. E.), 62440Q (SPIE, Bellingham, WA, 2006).
Busch, P., Heinonen, T. & Lahti, P. Heisenberg’s uncertainty principle. Phys. Rep. 452, 155–176 (2007).
Heisenberg, W. Über den anschaulichen Inhalt der quantentheoretischen Kinematik und Mechanik. Z. Phys. 43, 172–198 (1927).
Kennard, E. H. Zur Quantenmechanik einfacher Bewegungstypen. Z. Phys. 44, 326–352 (1927).
Ozawa, M. Heisenberg’s original derivation of the uncertainty principle and its universally valid reformulations. Curr. Sci. 109, 2006–2016 (2015).
Ozawa, M. Position measuring interactions and the Heisenberg uncertainty principle. Phys. Lett. A 299, 1–7 (2002).
Ozawa, M. Measurement breaking the standard quantum limit for free-mass position. Phys. Rev. Lett. 60, 385–388 (1988).
Braginsky, V. B., Vorontsov, Y. I. & Thorne, K. S. Quantum nondemolition measurements. Science 209, 547–557 (1980).
Caves, C. M., Thorne, K. S., Drever, R. W. P., Sandberg, V. D. & Zimmermann, M. On the measurement of a weak classical force coupled to a quantum mechanical oscillator, I, Issues of principle. Rev. Mod. Phys. 52, 341–392 (1980).
Ozawa, M. Disproving Heisenberg’s error-disturbance relation. Preprint at https://arxiv.org/abs/1308.3540 (2013).
Appleby, D. M. The error principle. Int. J. Theor. Phys. 37, 2557–2572 (1998).
Busch, P., Lahti, P. & Werner, R. F. Proof of Heisenberg’s error-disturbance relation. Phys. Rev. Lett. 111, 160405 (2013).
Busch, P., Lahti, P. & Werner, R. F. Measurement uncertainty relations. J. Math. Phys. 55, 042111 (2014).
Yamamoto, Y. & Haus, H. A. Preparation, measurement and information capacity of optical quantum states. Rev. Mod. Phys. 58, 1001–1020 (1986).
Raymer, M. G. Uncertainty principle for joint measurement of noncommuting variables. Am. J. Phys. 62, 986–993 (1994).
Appleby, D. M. The concept of experimental accuracy and simultaneous measurements of position and momentum. Int. J. Theor. Phys. 37, 1491–1510 (1998).
Appleby, D. M. Maximal accuracy and minimal disturbance in the arthurs-kelly simultaneous measurement process. J. Phys. A 31, 6419–6436 (1998).
Gudder, S. Joint distributions of observables. Indiana Univ. Math. J. 18, 325–335 (1969).
Ylinen, K. In Symposium on the Foundations of Modern Physics, (eds Lahti, P. & Mittelstaedt, P) 691–694 (World Scientific, Singerpore, 1985).
Lund, A. P. & Wiseman, H. M. Measuring measurement-disturbance relationships with weak values. New J. Phys. 12, 093011 (2010).
Mir, R. et al. A double-slit ‘which-way’ experiment on the complementarity-uncertainty debate. New J. Phys. 9, 287 (2007).
Garretson, J. L., Wiseman, H. M., Pope, D. T. & Pegg, D. T. The uncertainty relation in ‘which-way’ experiments: how to observe directly the momentum transfer using weak values. J. Opt. B: Quantum Semiclass. Opt. 6, S506–S517 (2004).
Srinivas, M. D. Collapse postulate for observables with continuous spectra. Commun. Math. Phys. 71, 131–158 (1980).
Ozawa, M. In Probability Theory and Mathematical Statistics, Lecture Notes in Mathematics 1299 (eds Watanabe, S. & Prohorov, Y. V.), 412–421 (Springer, Berlin, 1988).
Ozawa, M. Canonical approximate quantum measurements. J. Math. Phys. 34, 5596–5624 (1993).
Acknowledgements
The author acknowledges the support of the JSPS KAKENHI, No. 26247016 and No. 17K19970, and of the IRI-NU collaboration.
Author information
Authors and Affiliations
Contributions
M.O. researched, collated, and wrote this paper.
Corresponding author
Ethics declarations
Competing interests
The author declares no competing interests.
Additional information
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ozawa, M. Soundness and completeness of quantum root-mean-square errors. npj Quantum Inf 5, 1 (2019). https://doi.org/10.1038/s41534-018-0113-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41534-018-0113-z
This article is cited by
-
Error-mitigated fermionic classical shadows on noisy quantum devices
npj Quantum Information (2024)
-
Experimental graybox quantum system identification and control
npj Quantum Information (2024)
-
Quantum error mitigation in the regime of high noise using deep neural network: Trotterized dynamics
Quantum Information Processing (2024)
-
Ozawa’s Intersubjectivity Theorem as Objection to QBism Individual Agent Perspective
International Journal of Theoretical Physics (2024)
-
Parallelized variational quantum classifier with shallow QRAM circuit
Quantum Information Processing (2024)
