
Abstract
Graphene has shown considerable potential for sensing magnetic fields based on the Hall Effect, due to its high carrier mobility, low sheet carrier density, and low-temperature dependence. However, the cost of graphene in comparison to conventional materials has meant that its uptake in electronic manufacturing has been slow. To lower technological barriers and bring more widespread adoption of graphene Hall sensors, we are using a one-step laser scribing process that does not rely on multiple steps, toxic chemicals, and subsequent treatments. Laser-scribed graphene Hall sensors offer a linear response to magnetic fields with a normalized sensitivity of ~1.12 V/AT. They also exhibit a low constant noise voltage floor of ~ 50 nV/\(\sqrt {{\mathrm{Hz}}}\) for a bias current of 100 µA at room temperature, which is comparable with state-of-the-art low-noise Hall sensors. The sensors combine a high bendability, come with high robustness and operating temperatures up to 400 °C. They enable device ideas in various areas, for instance, soft robotics. As an example, we combined a laser-scribed graphene sensor with a deformable elastomer and flexible magnet to realize low-cost, compliant, and customizable tactile sensors.
Similar content being viewed by others

Introduction
The paradigm for technological advancements for emerging electronics is moving toward user-friendly solutions that includes ease of use, wearing sensation, portability, and human sensibility. The application potential of wearable and soft devices, electronic and e-skins has been, thus, of great interest during the past decades1,2. Magnetic sensing capabilities, integrated into flexible substrates, can provide unique properties, enabling to sense displacement, orientation, proximity, etc.3,4,5,6,7. Currently, silicon CMOS-based Hall sensors are the most commonly utlised magnetic-field solid-state sensors, mainly due to low-cost production and compatibility with standard microelectronic processes (see Supplementary Table 1)8. Flexible Hall-effect sensors have been realized in different ways, including by stacked thin films, such as bismuth9, permalloy5, and graphene10, deposited on a flexible substrate, such as polyimide (PI), polyethylenterephthalat, and polyetheretherketone (PEEK) (see Supplementary Table 2). In particular, graphene has risen as a promising channel material for constructing high-performance magnetic sensors, due to outstanding material merits, such as ultra-high carrier mobility, mechanical flexibility, atomically thin active body, and linear energy dispersion near the Fermi level11,12. Graphene Hall sensors have been reported with high performance in several vital aspects, such as sensitivity, linearity, resolution, and noise (see Supplementary Table 1)13. However, technologies for graphene processing are still at an early stage, which limits their practical applications in advanced electronics, mainly due to complex synthesis that requires high temperature, various chemical and high energy processing14. To overcome the primary challenge facing the commercialization of graphene, it is necessary to develop robust, cost-efficient, and facile fabrication methods. In 2014, 3D porous graphene was obtained through direct laser irradiation of PI15. Since then, laser-scribed graphene (LSG) has been extensively investigated from different theoretical and applied standpoints, including the laser graphitization16,17,18, effects of different types of lasers19,20,21, environments22,23, and lasing parameters24,25,26. LSG has been applied to a number of applications, such as sensing27,28,29,30,31,32, catalysis33,34,35, and energy storage devices36,37,38. Here, we utilized mask-free and chemical-free laser processing technology to fabricate highly flexible Hall-Effect sensors based on graphene. The sensitivity of the sensor has shown no degradation after the bending cycle and high-temperature tests, revealing the functionality of the sensor in harsh environments. To demonstrate the potential application of the LSG Hall sensor, it was combined with a deformable elastomer, and a flexible magnet to realize compliant soft tactile sensor.
Result and discussion
Material chracterization
Figure 1a shows the scanning electron microscopy (SEM) image of an LSG cross-section under low magnification, where the porous and carbonized flakes of a 62 ± 0.5-µm thickness is distinguished on the surface of the PI. The higher magnification image (inset of Fig. 1a) reveals that the LSG consists of a highly porous multilayer graphene structure. As scribing of PI with a laser beam occurs under ambient conditions and with local temperatures of >2500 °C, the presence of oxygen, and moisture during the scribing process burns off some amount of carbon, resulting in the porous morphology. The Raman spectra of the LSG, obtained using a laser wavelength of 473 nm, showed three typical characteristic peaks: D, G, and 2D at 1360, 1580, and 2720 cm−1, respectively (Fig. 1b)15. The D peak occurred due to defects and broken sp2 carbon–carbon bonds, G is related to graphite derived structures, and the sharp 2D peak is the dominant in monolayer graphene. The presence of a strong 2D peak can arise from the graphene structures induced by laser processing35. This result corresponds well with the XPS spectra analysis. The distinct C-C component and considerably reduced C–O, C=O, and COO components, shown in Fig. 1c, reveal the domination of sp2 carbons and broken chemical bonding structures.

a Cross‐sectional SEM images of porous graphene structures on PI after laser irradiation (scale bar: 30 µm). The inset with a higher magnification shows randomly arranged and interconnected graphene flakes (scale bar: 5 µm). b Raman spectrum of LSG. c High‐resolution XPS spectrum of the C1s region of LSG.
Magneto-electro-mechanical response
The measured Hall voltage values were obtained by averaging over 1 min and plotted as a function of the magnetic field in Fig. 2. The Hall voltage shows a linear dependence on the applied magnetic field, as expected, with a current normalized sensitivity of ~1.12 V/AT, extracted from the slope of the plotted line. Using the standard protocols of the Van der Pauw measurements from the National Institute of Standards and Technology39, a carrier mobility, µ = 736 cm2 V−1 s−1, and a sheet carrier density, n = 5.6 × 1014 cm−2, were found at room temperature. The obtained values are comparable with flexible bismuth9, graphene10,40, and metal-based41 Hall sensor elements on PI, PEEK, and Kapton Foil substrates. Meanwhile, the offset in the Hall voltage arises from misalignment of contacts and/or inhomogeneous current flow in the active sensor area. This is a common issue found in Hall-effect sensors, which can be minimized by various circuit techniques, such as auto-zeroing42, chopper stabilization43, and correlated double sampling44.

a Four-terminal Hall-measurement configuration of the Hall sensor. b Hall voltage over external magnetic field at a current of 100 µA.
The output of the sensor before, during, and after exposure to different strains is shown in Fig. 3a. The sensitivity remained stable after being bent to a minimum radius of 5 mm, which corresponds to a tensile strain of ~1.6%. The reduction in Hall sensitivity induced by an increased bending curvature can be attributed to the reduced active area perpendicular to the magnetic field. A decrease in bending radius (<5 mm) leads to the magnetic-field component parallel to the current direction, Bx, to increase, and the component orthogonal to the current direction, By, to decrease, resulting in the reduction of the Hall voltage. The current normalized sensitivity measurements revealed no degradation after 1, 10, 100, and 1000 cycles of bending (radius of 5 mm), demonstrating the flexibility and robustness of the LSG Hall sensor devices (Fig. 3b). This observation is in line with results acquired from the SEM images (Supplementary Fig. 1), which revealed that there is no perceptible change or damage in the morphology of the LSG after 1000 bending cycles.

a Current normalized sensitivity of the LSG Hall sensors before, during, and after one time bending to a certain radius. Scale bar of the inset image: 5 mm. b Bending cycle measurements of the current normalized sensitivity of the LSG Hall sensor.
Exposure to high temperatures
The effect of temperature on the LSG Hall sensor was first evaluated by thermal gravimetric analysis, which involves the detection of the mass change caused by a temperature increase. As seen in Fig. 4a, the LSG is able to withstand temperatures of at least 400 °C. There is a substantial drop in mass after ~500 °C, mainly due to evaporation, sublimation, and increasing pressure in reacting environments45. The effect of temperature on the current normalized sensitivity is shown in Fig. 4b. The sensitivity remains stable up to 400 °C, making the LSG Hall-effect sensors an attractive solution for high-temperature applications.

a TGM analysis of a sample of LSG on PI in nitrogen atmosphere. b Sensitivity as a function of temperature.
Noise measurements
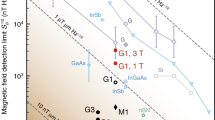
The voltage noise spectral density, Vn, and magnetic resolution, Bmin, which are determined by both signal and noise levels, are important parameters, for instance, to evaluate the detection limit. The obtained voltage noise spectral density, Vn, shown in Fig. 5a, reveals that the noise is dominated by 1/f or Flicker noise up to a corner frequency, fc = 17.6 Hz. The emergence of 1/f noise in graphene Hall-effect devices has been investigated in a number of experimental studies13,46,47,48, and it is broadly accepted that it originates from “exchange noise” due to, for example, carrier capture and release at traps, leading to fluctuations in the carrier density. Below the corner frequency, the noise increases linearly with increasing bias current (inset of Fig. 5a), which is induced by the higher number of fluctuations in electron carrier density. Above the corner frequency, the thermal noise voltage floor is as low as 50 nV/\(\sqrt {{\mathrm{Hz}}}\), which is in the range of previously reported values of ultra-low-noise graphene Hall sensors10,13. The magnetic resolution, Bmin, can be calculated using the voltage noise spectral density, Vn, and the sensitivity of the sensor by10,46

a Voltage noise density, Vn, and b magnetic resolution, Bmin, as a function of frequency.
The magnetic resolution, Bmin, of the LSG Hall sensor as a function of frequency is shown in Fig. 5b, where the minimum detectable magnetic field is as low as 0.446 mT/\(\sqrt {{\mathrm{Hz}}}\).
Soft tactile sensor
An initial attempt to utilize a linear Hall sensor to implement an artificial hand for a robot has been made by Kyberdt et al.49, where the external normal force applied to the surface of the elastomer induced the displacement of the embedded magnet. The applied force was then estimated by the changes of the magnetic-field vector and elastomer’s mechanical properties. Previously reported studies had used a rigid permanent magnet to produce a magnetic field49,50,51. Embedding the rigid piece of the magnet into the soft structure of the tactile sensor led to quick saturation of the Hall-effect sensor52, limiting the measurable force range. The permanent magnet also required a specified distance with respect to the Hall sensor, limiting the minimum thickness of the structure52. We have replaced the rigid permanent magnet by a magnetic skin that has relatively similar mechanical properties as the elastomeric body and which allows customization of the magnetic as well as mechanical properties53.
The developed LSG Hall sensor was integrated into a flexible and soft tactile sensor. The tactile sensor was realized by packaging a flexible magnet, a soft elastomer, and the LSG Hall sensor into a single architecture of 10 × 10-mm shape, as shown in Fig. 6. Applying a normal force to the top of the platform changes the distance between the flexible magnet and the LSG Hall sensor through the deformation of the elastomer, causing a magnetic-field variation at the sensor location. Three layers of the platform were fabricated separately and then stacked together using the sticky surface of the Ecoflex elastomer54,55. The LSG Hall sensor (described in “Material chracterization,” thickness of PI: 0.12 mm) was embedded in the bottom layer of the structure. The middle section is composed of silicone elastomer (2-mm thick Ecoflex, Smooth‐on), which was prepared by casting into a mold and planarized using a casting blade. The top layer of the structure is an ultra‐flexible magnet (thickness: 0.17 mm) composed of the same silicon‐based elastomer matrix (Ecoflex, Smooth‐on) and permanent magnetic particles (NdFeB, MQP‐16‐7FP). The detailed fabrication process of the composite magnet is described in Supplementary Fig. 2. In brief, the composite was prepared by mixing the Ecoflex (50 wt%) and the NdFeB powder (50 wt%) and molding. After curing, the magnetic composite was magnetized using a 1.8-T magnetic field in the out‐of‐plane direction. The impact of the NdFeB particles concentration on the modulus of elasticity and the remanent magnetization is shown in Supplementary Fig. 3. The magnetic-field distribution in the near magnet region (Fig. 7a) was characterized using the 3-axes magnetic-field mapper shown in Supplementary Fig. 4. It consists of a 3-axes robotic arm, with stepper motors actuating each axis, and a 3-axes Magneto Impedance sensor (BM1422AGV, Rohm). Only the z component, Bz, of the magnetic field was measured (averaged over 30 measurement samples), at a distance of 10 mm above the magnetacross the xy-plane, scanning with a step size of 500 µm. The geomagnetic field, measured at 20.78 µT before the sampling process, was removed from the measured magnetic-field data. Figure 8b shows the magnetic-field distribution for a sampling area of 25 × 25 mm, totaling 50 sample points in both the x and y directions. The strength of the z component of the magnetic field, Bz, reaches 300 µT at the center of symmetry (x = 12.5 mm, y = 12.5 mm, z = 10 mm) and diminishes with increasing distance from the center of the magnet in the xy-plane. The tactile sensor was then examined by applying a normal force up to 8 N with a square-shaped load (1 × 1 cm) in an electromechanical tester. The force was applied to the center of the square-shaped sensor. The LSG Hall sensor was operated by applying a current of 100 µA, and the Hall voltage was measured using a multimeter (Agilent, U1272A). The response of the sensor in Fig. 8 shows a linear increase of the Hall voltage with the applied force. An average sensitivity of 0.034 mV/N and a standard deviation of σ ± 0.002 N have been deduced from the obtained results. It should be noted that the sensitivity can be tailored and further optimized by the mass ratio of the NdFeB powder, the stiffness of the elastomer as well as the device dimensions, in particular the thickness of the elastomer.

a Assembly of a flexible LSG tactile sensor. b Optical photograph of the tactile sensor demonstrating its flexibility.

a Composite magnet sample with a thickness of 170 µm. b 3D surface plot of the z component of the magnetic field on the xy-plane at z = 10 mm above the magnet.

The error bars indicate the standard deviation.
A flexible, versatile, and robust graphene Hall sensor was realized with a facile, one-step fabrication process. The laser scribing technology showed promising results for a widespread adoption of flexible graphene Hall sensors, especially in harsh conditions. This method enables simple tuning of the geometry, dimensions, and shapes of the sensors. Having a linear response to magnetic fields with a normalized sensitivity of 1.12 V/AT, the LSG Hall sensors showed no degradation after being bent to a minimum radius of 5 mm, corresponding to 1.6% of tensile strain, and after 1000 bending cycles. The effects of high temperature on the performance of the Hall sensor were also investigated. The sensor could survive a temperature of up to 400 °C. Flicker noise dominates the noise signal up to a corner frequency of 17.6 Hz followed by a low constant noise voltage floor of 50 nV/\(\sqrt {{\mathrm{Hz}}}\), corresponding to a magnetic resolution of 0.446 mT/\(\sqrt {{\mathrm{Hz}}}\). The LSG Hall sensor was integrated into a magnetic-field-based soft and flexible tactile sensor. The tactile sensor offers a linear response to the applied force with a sensitivity of 0.034 mV/N, which could be easily tailored, exploiting the flexibility of the fabrication process.
Methods
Fabrication of LSG Hall-effect sensors
The sensor was realized by direct writing on a PI film of 125 µm (DuPont, Kapton #IM301449) using pulses from a CO2 laser (Universal Laser Systems PLS6.75 10.6 μm, laser peak power 75 W) as shown in Fig. 9a. The 3D porous conductive carbon structure with a high content of graphene flakes was obtained by a highly localized, rapid heating processes through laser irradiation. The laser beam parameters have a profound effect on controlling the chemical and physical properties of LSG. They have been tuned for good bonding of the carbon atoms to the substrate using the following values: 3.5-W power, 3-cm/s speed, 1000 pulses per inch, and 5-mm working distance. One hundred nanometers of gold were sputter-deposited on top of the contacts (Q300T, Quorum) to be able to connect to the data acquisition system by wire-bonding. Figure 9b illustrates a flexible large-area array of Hall-effect sensors. The versatility of the laser scribing technology also allows tailoring the geometries and sizes of the sensors, as shown in Fig. 9c. A single cross-shaped LSG Hall sensor, shown in the inset of Fig. 1b (horizontal and vertical lengths of a = 8 mm and b = 3 mm, respectively; electrode strip width of w = 0.87 mm), was used in a four-terminal Hall-measurement configuration in all experiments reported herein.

a Schematic of the fabrication process of graphene Hall-effect sensors using a CO2 laser. b Array of printed flexible LSG Hall-effect sensors. The inset shows a single cross-shaped LSG Hall sensor (scale bar: 2 mm). c Examples of various device architectures and geometries.
Characterization techniques
The surface morphology and the thickness of the carbon network patterns were investigated by SEM (Nova Nano630 Systems), confocal Raman microscopes (Alpha300AR+, WITec), and X‐ray photoelectron spectroscopy elemental analysis (XPS, ESCA 3400, Amicus Kratos Analytical).
The four-terminal LSG Hall-measurement configuration shown in Fig. 2a was established using the Physical Properties Measurement System (Ever Cool II, Quantum design Inc.,). The Hall voltages, VH, were measured by applying a magnetic field ranging from −7 to 7 T in the perpendicular direction, with a constant current flow, IC, of 100 µA. The sensor sensitivity is defined as the slope of the Hall response normalized to the value of the supply current by
Extensive bending tests were performed by exposing the LSG Hall sensor to varying strain values and characterized using Manual Transport Measurement Setup depicted in Supplementary Fig. 5. The sample was first attached to the surface of flexible molds with various cross-section diameters, such that the bending radius followed the dimensions of the molds. The PI bending was performed one time for bending radii of 2, 5, and 7.5 mm, with the LSG Hall sensor being on the external site of the curvature. The resultant tensile strain was then estimated by the ratio of the sensor thickness (161 µm, as seen in Supplementary Fig. 6) to the bending diameter. In addition, the application of 1000 bending cycles was achieved using an electromechanical pull tester (5900-Series, Instron), where each bending cycle involved bending the sensor to a radius of 5 mm and releasing it. The noise measurements were conducted in ambient conditions, and a frequency range from 3 Hz to 1 kHz at zero magnetic fields through the circuitry shown in Supplementary Fig. 7. The B1 and B2 contacts of the LSG Hall sensor were connected to a Spectrum Analyzer (E4448A PSA), while a constant bias current IC between the contacts A1 and A2 was applied by a Keithley 4200.
Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Chen, D. & Qibing, Pei Electronic muscles and skins: a review of soft sensors and actuators. Chem. Rev. 117, 11239–11268 (2017).
Nassar, J. M. et al. Compliant lightweight non-invasive standalone “Marine Skin” tagging system. npj Flex. Electron. 2, 1–9 (2018).
Lenz, J. A. E. S. Magnetic sensors and their applications. IEEE Sens. J. 6, 631–649 (2006).
Ge, J. et al. A bimodal soft electronic skin for tactile and touchless interaction in real time. Nat. Commun. 10, 1–10 (2019).
Granell, P. N. et al. Highly compliant planar Hall effect sensor with sub 200 nT sensitivity. npj Flex. Electron. 3, 1–6 (2019).
Bermúdez, G. S. C., Fuchs, H., Bischoff, L., Fassbender, J. & Makarov, D. Electronic-skin compasses for geomagnetic field-driven artificial magnetoreception and interactive electronics. Nat. Electron. 1, 589–595 (2018).
Alfadhel, A. & Kosel, J. Magnetic nanocomposite cilia tactile sensor. Adv. Mater. 27, 7888–7892 (2015).
Popovic, R. S. Hall effect devices. (CRC Press, 2003).
Melzer, M. et al. Wearable magnetic field sensors for flexible electronics. Adv. Mater. 27, 1274–1280 (2015).
Schaefer, B. T.et al. Gate-tunable graphene hall sensors with high magnetic field sensitivity. https://arxiv.org/abs/1912.12678 (2019).
Song, G., Ranjbar, M. & Kiehl, R. A. Operation of graphene magnetic field sensors near the charge neutrality point. Commun. Phys. 2, 1–8 (2019).
Collomb, D., Li, P. & Bending, S. J. Nanoscale graphene Hall sensors for high-resolution ambient magnetic imaging. Sci. Rep. 9, 1–10 (2019).
Xu, H. et al. Flicker noise and magnetic resolution of graphene hall sensors at low frequency. Appl. Phys. Lett. 103, 112405 (2013).
Sahoo, S. & Nayak, G. C. in Surface engineering of graphene. 1–29 (Springer, 2019).
Lin, J. et al. Laser-induced porous graphene films from commercial polymers. Nat. Commun. 5, 1–8 (2014).
Vashisth, A. et al. ReaxFF simulations of laser-induced graphene (LIG) formation for multifunctional polymer nanocomposites. ACS Appl. Nano Mater. 3, 1881–1890 (2020).
Ye, R., James, D. K. & Tour, J. M. Laser-induced graphene. Acc. Chem. Res. 51, 1609–1620 (2018).
Sha, Y. et al. Laser induced graphitization of PAN-based carbon fibers. RSC Adv. 8, 11543–11550 (2018).
Carvalho, A. F. et al. Laser‐induced graphene strain sensors produced by ultraviolet irradiation of polyimide. Adv. Funct. Mater. 28, 1805271 (2018).
Zhang, Z. et al. Visible light laser-induced graphene from phenolic resin: a new approach for directly writing graphene-based electrochemical devices on various substrates. Carbon 127, 287–296 (2018).
Li, G., Law, W.-C. & Chan, K. C. Floating, highly efficient, and scalable graphene membranes for seawater desalination using solar energy. Green. Chem. 20, 3689–3695 (2018).
Li, Y. et al. Laser‐induced graphene in controlled atmospheres: from superhydrophilic to superhydrophobic surfaces. Adv. Mater. 29, 1700496 (2017).
Cai, J., Lv, C. & Watanabe, A. Laser direct writing of high-performance flexible all-solid-state carbon micro-supercapacitors for an on-chip self-powered photodetection system. Nano Energy 30, 790–800 (2016).
Nasser, J., Groo, L., Zhang, L. & Sodano, H. Laser induced graphene fibers for multifunctional aramid fiber reinforced composite. Carbon 158, 146–156 (2020).
Lamberti, A. et al. New insights on laser-induced graphene electrodes for flexible supercapacitors: tunable morphology and physical properties. Nanotechnology 28, 174002 (2017).
Duy, L. X. et al. Laser-induced graphene fibers. Carbon 126, 472–479 (2018).
Tao, L.-Q. et al. An intelligent artificial throat with sound-sensing ability based on laser induced graphene. Nat. Commun. 8, 1–8 (2017).
Kaidarova, A. et al. Laser‐printed, flexible graphene pressure sensors. Glob. Challenges 4, 2000001 (2020).
Kaidarova, A. et al. Wearable multifunctional printed graphene sensors. npj Flexible. Electronics 3, 1–10 (2019).
Kaidarova, A. et al. Flexible and biofouling independent salinity sensor. Adv. Mater. Interfaces 5, 1801110 (2018).
Kaidaorva, A. et al. Flexible, four-electrode conductivity cell for biologging applications. Results Mat. 1, 100009 (2019).
Stanford, M. G., Yang, K., Chyan, Y., Kittrell, C. & Tour, J. M. Laser-induced graphene for flexible and embeddable gas sensors. ACS Nano 13, 3474–3482 (2019).
Zhang, J., Ren, M., Li, Y. & Tour, J. M. In situ synthesis of efficient water oxidation catalysts in laser-induced graphene. ACS Energ. Lett. 3, 677–683 (2018).
Ren, M., Zhang, J. & Tour, J. M. Laser-induced graphene hybrid catalysts for rechargeable Zn-air batteries. ACS Appl. Energ. Mater. 2, 1460–1468 (2019).
Ye, R., James, D. K. & Tour, J. M. Laser‐induced graphene: from discovery to translation. Adv. Mater. 31, 1803621 (2019).
Lamberti, A., Clerici, F., Fontana, M. & Scaltrito, L. A highly stretchable supercapacitor using laser‐induced graphene electrodes onto elastomeric substrate. Adv. Energ. Mater. 6, 1600050 (2016).
Li, L. et al. High‐performance pseudocapacitive microsupercapacitors from laser‐induced graphene. Adv. Mater. 28, 838–845 (2016).
Song, W. et al. Flexible, stretchable, and transparent planar microsupercapacitors based on 3D porous laser‐induced graphene. Small 14, 1702249 (2018).
Kushmerick, J. G. et al. Hall effect measurements. https://www.nist.gov/pml/nanoscale-device-characterization-division/popular-links/hall-effect.
Wang, Z. et al. Encapsulated graphene‐based Hall sensors on foil with increased sensitivity. Phys. Status Solidi (b) 253, 2316–2320 (2016).
Mystkowski, A., Kierdelewicz, A., Jastrzebski, R. P., Dragašius, E. & Eidukynas, D. Flux measurement and conditioning system for heteropolar active magnetic bearing using Kapton-foil Hall sensors. Mech. Syst. Signal Process. 115, 394–404 (2019).
Min, Y.-J., Kwon, C.-K., Kim, H.-K., Kim, C. & Kim, S.-W. A CMOS magnetic Hall sensor using a switched biasing amplifier. IEEE Sens. J. 12, 1195–1196 (2011).
Heidari, H., Bonizzoni, E., Gatti, U. & Maloberti, F. A CMOS current-mode magnetic Hall sensor with integrated front-end. IEEE Trans. Circ. Syst. 62, 1270–1278 (2015).
Lee, J. Y., Oh, Y., Oh, S. & Chae, H. Low power CMOS-based Hall sensor with simple structure using double-sampling delta-sigma ADC. Sensors 20, 5285 (2020).
Prime, R. B., Bair, H. E., Vyazovkin, S., Gallagher, P. K. & Riga, A. Thermogravimetric analysis (TGA). in Thermal analysis of polymers: fundamentals and applications, John Wiley & Sons, Inc., 241–317 (2009).
Porciatti, A. et al. in 2017 International Conference on Noise and Fluctuations (ICNF). 1–4 (IEEE, 2017).
Chen, Z., Lin, Y.-M., Rooks, M. J. & Avouris, P. Graphene nano-ribbon electronics. Physica E: Low Dimen. Syst. Nanostruct. 40, 228–232 (2007).
Shao, Q. et al. Flicker noise in bilayer graphene transistors. IEEE Electron Device Lett. 30, 288–290 (2009).
Kyberd, P. J. & Chappell, P. H. A force sensor for automatic manipulation based on the Hall effect. Meas. Sci. Technol. 4, 281 (1993).
Wang, H. et al. Design methodology for magnetic field-based soft tri-axis tactile sensors. Sensors 16, 1356 (2016).
Jamone, L., Natale, L., Metta, G. & Sandini, G. Highly sensitive soft tactile sensors for an anthropomorphic robotic hand. IEEE Sens. J. 15, 4226–4233 (2015).
Mirzanejad, H., Tabrizi, M. M., Fathian, A., Sharifnejad, A. & Agheli, M. in 2017 5th RSI International Conference on Robotics and Mechatronics (ICRoM). 150–155 (IEEE, 2017).
Almansouri, A. S. et al. An imperceptible magnetic skin. Adv. Mater. Technol. 4, 1900493 (2019).
Hong, S. Y. et al. Stretchable active matrix temperature sensor array of polyaniline nanofibers for electronic skin. Adv. Mater. 28, 930–935 (2016).
Yoon, J., Lee, J. & Hur, J. Stretchable supercapacitors based on carbon nanotubes-deposited rubber polymer nanofibers electrodes with high tolerance against strain. Nanomaterials 8, 541 (2018).
Acknowledgements
This research is a contribution to the CAASE project funded by King Abdullah University of Science and Technology (KAUST) under the KAUST Sensor Initiative.
Author information
Authors and Affiliations
Contributions
The research aims and methods were proposed by A.K., C.M.D., and J.K.; the fabrication process was carried out by A.K. and A.A; the structural characterization experiments were carried out by A.K. and N.R.G.; the Hall-effect measurement experiments were handled by A.K. and W.L.; the magnetic-field measurements in near magnet region were carried about by A.K. and L.S.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kaidarova, B.A., Liu, W., Swanepoel, L. et al. Flexible Hall sensor made of laser-scribed graphene. npj Flex Electron 5, 2 (2021). https://doi.org/10.1038/s41528-021-00100-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41528-021-00100-4
This article is cited by
-
Microfabrication of functional polyimide films and microstructures for flexible MEMS applications
Microsystems & Nanoengineering (2023)
-
Flexible organic electrochemical transistors for chemical and biological sensing
Nano Research (2022)
