
Abstract
Convolutional neural networks are an important category of deep learning, currently facing the limitations of electrical frequency and memory access time in massive data processing. Optical computing has been demonstrated to enable significant improvements in terms of processing speeds and energy efficiency. However, most present optical computing schemes are hardly scalable since the number of optical elements typically increases quadratically with the computational matrix size. Here, a compact on-chip optical convolutional processing unit is fabricated on a low-loss silicon nitride platform to demonstrate its capability for large-scale integration. Three 2 × 2 correlated real-valued kernels are made of two multimode interference cells and four phase shifters to perform parallel convolution operations. Although the convolution kernels are interrelated, ten-class classification of handwritten digits from the MNIST database is experimentally demonstrated. The linear scalability of the proposed design with respect to computational size translates into a solid potential for large-scale integration.
Similar content being viewed by others

Introduction
Inspired by the working mechanisms in biological visual nervous systems, convolutional neural networks (CNNs) have become a powerful category of artificial neural networks1. CNNs are commonly used in image recognition to greatly reduce the network complexity and conduct high-precision predictions, with wide applications in object classification, computer vision, real-time translation, and other areas2,3,4,5. As an increasing number of complex scenarios continue to emerge, including auto-driving and artificial intelligence services on the cloud6,7, it is strongly desired to increase the processing speed of the underlying neuromorphic hardware while reducing its computing energy consumption. However, in present schemes, mainly based upon the von Neumann computing paradigm, there is an inherent trade-off between the data exchange speed and the energy consumption; this is mainly because in these schemes, the memory and process unit are separated8,9,10,11.
Optical neural networks (ONNs) are regarded as promising candidates for the next generation of neuromorphic hardware processors. Photonics devices have low interconnect loss and can overcome the bandwidth bottleneck of their electrical counterparts to achieve ultrahigh computing bandwidth up to 10 THz12,13,14,15,16,17. Additionally, the light transmission in the ONN simultaneously implements data processing, which effectively avoids data tidal transmission in the von Neumann computing paradigm. In recent years, ONNs have attracted much interest in the realization of high-speed, large-scale and high-parallel optical neuromorphic hardware, with demonstrations including the use of light diffraction18,19,20,21,22,23,24, light interference25,26,27,28,29,30, light scattering31,32 and time-wavelength multiplexing16,33,34,35,36,37,38,39. The reported ONNs have been comparable to the state-of-the-art digital processors in terms of efficiency but have revealed a huge leap in computing density40,41. From the calculation results, ONN has the potential to improve at least two orders of magnitude in terms of energy consumption and computing density42. However, most of the reported works point to a quadratic increase in the component count, chip size and power consumption as the computational matrix size is scaled up43, which largely limits the integration potential of the resulting optical computing scheme while significantly increasing the complexity of the manipulation. The linearly scalable compact integrated diffractive optical network (IDNN) demonstrated in ref. 24. still requires 2N units to implement the input dimension of N.
In this paper, we propose a compact on-chip incoherent optical convolution processing unit (OCPU) integrated on a low-loss silicon nitride (SiN) platform to extract various feature maps in a fully parallel fashion. Leveraging on the combination of wavelength division multiplexing (WDM) technology and multimode interference coupling, the OCPU, includes two 4 × 4 multimode interference (MMI) cells and four phase shifters (PSs) as the minimum element count, can simultaneously support three 2 × 2 correlated real-valued kernels. Hence, three groups of convolution computing operations are performed in the OCPU in a parallel manner. The proposed unit is also dynamically reconfigurable only by tuning four PSs. Although the kernels are interrelated, the OCPU can work as a specific convolutional layer. The front-end SiN-based OCPU and an electrical fully connected layer jointly form a CNN, which is utilized to perform a ten-class classification operation from the Modified National Institute of Standards and Technology (MNIST)44 handwritten digits with an accuracy of 92.17%. Moreover, the components in the proposed OCPU grow linearly (N units for input dimension of N) with the size of the calculated matrix, providing solid potential for on-chip realization of OCPUs with increased computation capabilities, higher processing speed and lower power consumption toward the next generation of artificial intelligence platforms.
Results
Principle
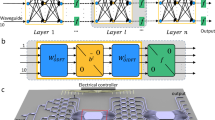
The structure diagram of the designed OCPU is shown in Fig. 1a, which contains two 4 × 4 MMI cells and four PSs. The input data are encoded into four incoherent light waves and then sent into the OCPU to perform multiply accumulated (MAC) operations. The OCPU, as parallel multiple kernels, can simultaneously implement several groups of convolution operations. Each output port is regarded as an independent kernel, and the number of elements for each kernel is equal to that of the input ports, which indicates that the computing capability increases with the number of input ports. In addition, the kernel is dynamically reconfigurable by changing the current of the PSs via the thermo-optic effect.

a Structure diagram of OCPU. b The OCPU simultaneously performs three different groups of convolutional operations using incoherent light. The unit includes three functional parts: (1) input image slices to 27 sub-images; (2) flatten 27 sub-images into one-dimensional (1D) vectors; and (3) implement the convolutional operation with the OCPU.
As shown in Fig. 1a, the input vector \(I\) is simultaneously modulated on the amplitude of four incoherent light waves with the same initial amplitudes via electro-optical modulation. The complex-valued transfer matrices \(M\) and \(\varPhi\) for an MMI cell and PS array, respectively, are written as:
where the element \({m}_{{uv}}\left(u=1 \sim 4,v=1 \sim 4\right)\) in \(M\) means the response of the MMI linking the output port \(u\) and the input port \(v\), and each row of \(\varPhi\) is the additional phase of a PS. After transmission in the OCPU and square-law detection at the photodetectors (PDs), the full transfer matrix of OCPU can be expressed as:
where the symbol \(\odot\) is the Hadamard product45 (e.g., multiplication of the elements in the corresponding positions between matrix \(M\) and matrix \(\varPhi\)) and the symbol \(\times\) represents the multiplication of two matrices.
When a 4 × 1 vector \(I\) is input to the OCPU, vector-matrix multiplication (VMM) is conducted in the OCPU, and the operation result is inferred as \(O=R\times I\), where each output of the OCPU is the weighted summation of input vector \(I\), which can be regarded as a convolutional result. Therefore, each row of \(R\) can be used as a convolution kernel without negative values. Negative values are also achieved by setting any one vector as a ground line and subtracting it from the remaining three vectors. Taking the last vector as a ground line, for example, three kernels \({A}_{d} \sim {C}_{d}\) with negative values are rewritten as:
From Eqs. (1) and (3), the dynamically reconfigurable kernel matrix is implemented by tuning the PSs using the thermo-optic effect. This is based on the change that is induced on the refractive index of the waveguides with the driving current employed in the microheaters of the PSs, allowing light waves to acquire a desired extra phase. In Eq. (2), \({r}_{{uv}}\) changes with the phase of the optical waveform; therefore, \({A}_{d}\), \({B}_{d}\), and \({C}_{d}\) are subsequently changed with the phase to reconstruct three new kernels (more details can be seen in Supplementary Note 1).
The convolution process for feature map extraction is shown in Fig. 1b, which includes a serial data one-dimensional (1D) flattening operation, the optical kernel core representation and the convolution operation with the OCPU. First, the procedure of how to compress a two-dimensional (2D) image matrix into a 1D vector is shown in Fig. 1b. Taking a “7” digital image with 28 × 28 pixels as an example, the 28 × 28 matrix is totally divided into 27 sub-matrix slices along the longitudinal axis, with 2 × 28 elements for each sub-image. Then, the 27 sub-images are flattened by column into sub-vectors and form a 1 × 1512 vector \(X=[\begin{array}{ccccccc}{x}_{1} & {x}_{29} & {x}_{2} & {x}_{30} & \cdots & {x}_{756} & {x}_{784}\end{array}]\) by means of connecting the sub-vectors head-to-tail.
The sequential data \(X\) simultaneously modulate the amplitude of incoherent light waves with wavelengths of \({\lambda }_{1} \sim {\lambda }_{4}\) via the Mach–Zehnder modulator (MZM) and generate four replicas of encoded data \(X\). Then, the optical waveforms are routed into four parallel channels with one wavelength in each and undergo a time delay of \(\varDelta \tau\) between adjacent channels, equal to the reciprocal of the baud rate of the modulation signal \({f}_{b}\) (i.e., \(\varDelta \tau=\frac{1}{{f}_{b}}\)). Four temporal waveforms are reallocated and recombined at the output port of the OCPU. The orthogonality between each channel is guaranteed by the incoherent beam, such that different input waveforms propagate individually in the OCPU. Subsequently, the PD implements square-law detection and sums the power of the four incoherent wavelengths (the relationship between the bandwidth of the PD and the wavelength interval of incoherent wavelengths is further discussed in Supplementary Note 6). The computing result at each time slot of each output port is the convolution between the adjacent four elements in vector \(X\) and the 2 × 2 kernel matrix \({A}_{d}\), \({B}_{d}\), or \({C}_{d}\).
Some insignificant values are contained in the output of OCPU, which need to be eliminated to achieve feature extraction following the principle of convolution operation. The rule to retain the effective elements in the convolution results is that the even-numbered values except the first one are significant for each sub-vector. Hence, for the first sub-vector, the 27 effective values in the first row of the feature matrix are \(\left[\begin{array}{cc}\begin{array}{cc}{y}_{4} & {y}_{6}\end{array} & \begin{array}{cc}\cdots & {y}_{56}\end{array}\end{array}\right]\). Finally, 27 rows of effective values are rearranged in a column format to form the 27 × 27 feature matrix with a kernel sliding window of 1 (more details can be seen in Supplementary Note 2).
The OCPU is able to simultaneously perform a multi-kernel parallel convolution operation. From Fig. 1b, each output port works as a 1 × 4 weight vector or a 2 × 2 kernel, and 4 MAC operations are performed at each time slot. Therefore, the computing speed is equal to \(4{f}_{b}\) MAC operations per second for each output port. The total computing speed of the OCPU with three parallel kernels is thereby \(3\times 4{f}_{b}=12{f}_{b}\) MAC operations per second. In general, for an OCPU with \(n\) input/output ports, the total computing speed reaches \(n\left(n-1\right){f}_{b}\) MAC operations per second. In summary, the computing speed of MAC operations for one port is linearly proportional to the number of elements in a kernel, and the overall computing capability of OCPU increases quadratically with the parallel scale. It is worth noting that there is a certain correlation of the formed \(n-1\) kernels in the OCPU. The reconfiguration of one kernel inevitably results in linkage to other kernels (this is discussed in more detail in Supplementary Note 11).
The OCPU chip
The SiN-based OCPU, as the parallel convolution kernel, is fabricated at a CMOS compatible platform using the low-pressure chemical vapor deposition and Damascus process to realize the low-loss and high-confinement SiN waveguides46. The micrographs of the chip are shown in Fig. 2a–c, where Fig. 2a is the microscope image of the whole OCPU, Fig. 2b shows the microscope image of the 4 × 4 MMI cell, which features a footprint of 275 µm × 15 µm and an insertion loss of ~1 dB, and Fig. 2c shows the phase shift region based on the thermo-optic effect. The transition waveguides between the multimode regions and the straight waveguide are tapers with a linearly varying width from 2 to 1 µm to reduce the scattering loss from the sharp edges. The PSs between the two MMI cells are covered with aluminum microheaters 400 µm in length, 1.5 µm in width and 0.4 µm in height. Spot size converters at input/output facets are coupled with standard single mode fibers with an edge coupling loss of ~1.5 dB per port. Figure 2d shows the packaged OCPU.

a Microscope image of the OCPU chip with two 4 × 4 MMI cells and four PSs. b Microscope image of the MMI. c Microscope image of the phase shift region. d The packaged chip.
Experiment
Here, we experimentally demonstrate the optical convolution operation to extract the feature maps of handwritten digits with the proposed layout shown in Fig. 3. Four wavelength-dependent light waves are generated from the laser array with wavelengths of 1549.32, 1550.12, 1550.92, and 1551.72 nm and then multiplexed in an arrayed waveguide grating (AWG) to simultaneously achieve electro-optical conversion in a Mach–Zehnder modulator (MZM). Here, the data rate from the waveform generator is set to 16.60 Gbaud/s (each data point is sampled 3 times with a sampling rate of 49.8 GSa/s), corresponding to a fixed delay of \(1\div16.60G\approx 60.24\) ps. Afterward, the temporal waveforms underwent wavelength-division demultiplexing and time delay with three optical tunable delay lines (OTDLs) to reach a one-bit time delay between adjacent channels. Four semiconductor optical amplifiers (SOAs) are used to compensate for the loss along each channel. After summing the replicas from the output port of the OCPU, the powers of the incoherent beam are converted into electrical signals by PDs and recorded by an oscilloscope (OSC).

LD laser diode, AWG arrayed waveguide grating, PC polarization controller, OTDL optical tunable delay line, SOA semiconductor optical amplifier, PD photodetector, OSC oscilloscope.
The computing performance of the OCPU is first verified by extracting the feature map of handwritten digits with 28 × 28 pixels and 8-bit resolution from the MNIST handwritten digits database. Figure 4 shows the convolution process of digit “7” with the kernel of \(\left[\begin{array}{cc}1 & 0\\ 0 & 1\end{array}\right]\). The image is first flattened into a 1 × 1512 (i.e., \(1512=(2\times 28)\times 27\)) vector, where (2 × 28) represents the number of elements for each sub-matrix and 27 is the number of submatrices. Then, the 1 × 1512 vector is encoded into a serial electrical waveform from the waveform generator and fed into the MZM to modulate the intensity of the light wave at a data rate of 16.60 Gbaud/s. Therefore, the convolution time with a non-negative kernel is \(1512\div16.60\,\approx \,91.08\) ns for one image, that is, \(1\div91.08{{{{{{\rm{ns}}}}}}}\,\approx \,10.98\) million images per second (multiple acquisitions are needed to reduce noise when kernels contain negative values). Figure 4a is the input image of digit “7” from the MNIST database, and Fig. 4b shows the ideal waveform of the flattened digit “7” (orange line) and the experimental one (blue line) from the waveform generator. Figure 4d shows the ideal and experimental convolution results, and the feature image in Fig. 4f is recovered from significant values in Fig. 4d. Figure 4c, e shows magnified images of Fig. 4b, d at 23.43–26.95 ns, respectively.

a The input image of digit “7” from the MNIST database. b Sequential ideal (orange line) and experimental (blue line) electronic waveforms. d Ideal and experimental convolution output waveform with the kernel of \(\left[\begin{array}{cc}1 & 0\\ 0 & 1\end{array}\right]\). c, e are magnifications of (b) and (d) at 23.43–26.95 ns, respectively. f The recovered feature image.
The kernel of the OCPU is dynamically reconfigured by tuning the driving current of the PSs. In the experiment, kernels without negative values are acquired in a single output port for a single acquisition, and kernels involving both non-negative and negative values are achieved by subtracting the reference port from other ports and averaging 13 acquisitions to reduce noise. Figure 5 shows the original images (Fig. 5a) of five randomly selected MNIST digit images (“9”, “6”, “0”, “5” and “4”) as well as feature maps obtained with the digital computer (Fig. 5b) and the OCPU (Fig. 5c). Comparing the simulation results in the computer with the experimental results of the OCPU, the feature images extracted with the proposed OCPU fit well with the simulated results, with an average root mean square error (RMSE) of only 0.0617 among the 25 feature images shown in Fig. 5. The bit precision of MAC operations with the OCPU is also calibrated, and the standard deviation is −0.0298, resulting in a bit precision of 5-bit (more details about RMSE and bit precision can be seen in Supplementary Note 4).

a The input handwritten digit images of “9”, “6”, “0”, “5”, and “4”. b Feature maps with the digital computer. c Feature maps with the OCPU chip. The numbers marked on each picture are the root mean square error (RMSE) between feature maps obtained with the computer and the OCPU.
Here, the sliding speed of the convolution window is equal to the encoded band rate of 16.60 Gbaud/s. Each output symbol is the result of 4 (the length of each kernel) MAC, and the computing speed is \(4\times 16.60G=66.40\) giga-MAC operations per second for each kernel. For 3 real-value correlated kernels parallel accelerated computation in the OCPU, the total computing speed is up to \(66.40\times 3=199.20\) giga-MAC operations per second. In the case of using four non-negative-value correlated kernels, the computing speed amounts to \(66.40\times 4=265.60\) giga-MAC operations per second. In this work, the 28 × 28 pixel image is convolved with a 2 × 2 kernel to achieve a 27 × 27 pixel feature map, so the effective computing speed is \(729\div1512\times 265.60=128.06\) giga-MAC operations per second, where the convolution results of each image are comprised of 1512 sample points and 729 significant values.
In Fig. 6a, we use the OCPU incorporating an electronic fully connected layer and a ReLU nonlinear activation function47 in a digital computer to form a CNN for the ten-class classification of “0 ~ 9” handwritten digit images. Two kernels are utilized in the optical convolution layer, generating two 1 × 729 feature maps. After being activated using the ReLU nonlinear function, two 1 × 729 feature maps are reshaped into a 1 × 1458 vector and then fed to the fully connected layer to implement the recognition task. Here, for the ten-class classification, the weight matrix of the fully connected layer with a size of 1458 × 10 is trained offline to converge on the minimum cross entropy loss using the backpropagation algorithm48 (stochastic gradient descent algorithm49,50). Therefore, ten output neurons are the result of matrix multiplication between the 1 × 1458 vector and weight matrix 1458 × 10, where the largest value of the 1 × 10 output represents the predicted category.

a The network structure of the CNN, which contains an optical convolution layer and an electrically fully connected layer. b The confusion matrix of recognizing 10,000 digits in the MNIST test database, where the abscissa indicates the true labels and the ordinate indicates the recognition results. c The variation in simulation accuracy, experimental accuracy, and experimental cross entropy loss during 350 epochs of training.
We experimentally demonstrate ten-class classification of 70,000 images from the MNIST dataset with 60,000 for training and 10,000 for testing. The confusion matrix for 10,000 test images (Fig. 6b) and the variation in classification accuracy (Fig. 6c) show an accuracy of 92.17% for the experiment versus 94.51% for the theory after 350 epochs. The deviation from the theoretical accuracy of 2.34% is mainly caused by the limited bit precision (the relationship between the bit precision and the recognition accuracy can be seen in Supplementary Note 9), which is caused by numerous factors, including the electrical and optical noise and instability of some optical devices (polarization state jitter, temperature drift). In addition, to work in the linear amplification region, low optical power is input to the low gain and high noise figure SOA, which makes it difficult to avoid introducing noise and leads to a low signal noise ratio at the PD. Moreover, digital domain processes such as analog-to-digital conversion and subtraction further raise the noise and degrade the signal-to-noise ratio. The average operation used in the experiment reduces the noise to a certain extent but at the cost of prolonging the calculation time. Balanced detection is an alternative scheme to dispel noise and improve bit precision without electrical average processing (an analysis of the further improvement in accuracy can be seen in Supplementary Note 10).
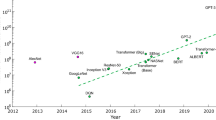
Table 1 presents a performance comparison of the representative computing framework, including the optical solutions (such as the Mach‒Zehnder interferometer (MZI)25, microring resonator (MRR)33,51, integrated diffractive optical network (IDNN)24, phase changed material (PCM)16 and others35,52,53,54) and analog electrical solution55. The programmable units in refs. 16,24,25,33,51,53,54. show quadratic relationship with the computational matrix size scaling, whereas the optical scheme has a linear relationship24 with a slope of 2. The programmable units in the OCPU grow linearly with the kernel size, and half of the components are purely needed to perform the equivalent computational scale in comparison to the linear relationship optical scheme24. Owing to the large reduction in the basic unit, the energy efficiency is calculated as 4.84 pJ/MAC, and the computational density is calculated as 12.74 TMACs/s/mm2 (more details can be seen in Supplementary Note 8). The OCPU offers a solution of high computational density at the slight cost of recognition accuracy. The strength of linear scalability will be greatly demonstrated with the figure of merit of computational density to a larger scale. Drawing the 4 × 4 chip design thought, the Si-based 9 × 9 chip size is estimated to be 0.0166 mm2, and the energy efficiency is expected to be 0.95 pJ/MAC. Consequently, the computed density is calculated to be 1.19 PMACs/s/mm2, which is a two-order-of-magnitude improvement over other optical solutions. (More designed details about the Si-based 9 × 9 OCPU can be seen in Supplementary Notes 7, 8 and 12).
Although the OCPU-based architecture offers some advantages in computational density and so on, the correlation between kernels will limit the performance of the OCPU-based convolutional layer to some extent. Even so, the OCPU can still serve as a specific convolutional layer and significantly improve the recognition accuracy (more details can be seen in Supplementary Note 12). In scenarios such as edge computing, it may be sufficient to achieve reasonable performance given the strict restrictions on footprint or energy. In the future, exploring special application scenarios where this correlation does not affect performance will be an important research direction.
Discussion
In summary, we have designed and demonstrated a SiN-based compact OCPU to extract various feature images. The demonstrated OCPU, includes two 4 × 4 multimode interference cells and four PSs and simultaneously performs a convolutional operation with three correlated, user-defined 2 × 2 real-valued kernels. Dynamic reconfiguration to extract the desired feature images is easily realized by tuning the PSs. The front-end SiN-based OCPU as well as an electrical fully connected layer form a CNN that enables efficient ten-class classification of MNIST handwritten digits. Owing to the phase regulatory mechanism, the proposed scheme offers numerous important advantages over previous designs, such as a compact size, easier manipulation and higher robustness. In addition, benefitting from the linear relationship between the number of elements and the dimension of the matrix, the proposed OCPU has solid potential for on-chip large-scale integration by simply increasing the number of ports as well as by utilizing a wavelength multiplexing strategy in each port toward the next generation of high-performance, ultrahigh-speed artificial intelligence platforms.
Methods
Configuration
Optical convolution computing with the proposed OCPU was implemented using commercially available optoelectronic components. The laser array is an IDPHOTONICS CoBrite-DX laser source with four tunable polarization-maintaining output ports to generate four wavelengths of 1549.32, 1550.12, 1550.92, and 1551.72 nm. Two AWGs are standard AWGs for communication from SHIJIA PHOTONS with a wavelength interval of 100 GHz (AAWG-F20-100) to couple four wavelengths into one beam and then wavelength-division demultiplexing into four beams after modulation in the MZM. The polarization controller (PC) is a Thorlabs FPC032 to adjust the polarization of the light beam. The MZM is an iXblue intensity modulator with a bandwidth of 40 GHz. The waveform generator is Tektronix AWG70001A with a maximum sample rate of 50 GSa/s to generate the input waveform. Three OTDLs are Advanced Fiber Resources VDL-1550-500 with a maximum delay of 500 ps to realize a 1-bit time delay between adjacent channels. The SOAs that are utilized to compensate for the loss of each channel are Thorlabs SOA10103S with a linear amplification area of ~22 dB. The PDs are Finisar XPDV2150R with a bandwidth of 50 GHz to convert optical waveforms into electrical waveforms. The temporal waveforms are sampled with a real-time oscilloscope (Tektronix DPO73304D).
Data availability
The data that support the findings of this study are available from the corresponding authors upon request. Source data are provided with this paper.
References
Jain, A. K., Jianchang, M. & Mohiuddin, K. M. Artificial neural networks: a tutorial. Computer 29, 31–44 (1996).
Shabairou, N., Cohen, E., Wagner, O., Malka, D. & Zalevsky, Z. Color image identification and reconstruction using artificial neural networks on multimode fiber images: towards an all-optical design. Opt. Lett. 43, 5603–5606 (2018).
Voulodimos, A., Doulamis, N., Doulamis, A. & Protopapadakis, E. Deep learning for computer vision: a brief review. Comput Intell. Neurosci. 2018, 7068349 (2018).
Krizhevsky, A., Sutskever, I. & Hinton, G. E. Imagenet classification with deep convolutional neural networks. Commun. ACM 60, 84–90 (2017).
Gu, J., Neubig, G., Cho, K. & Li, V. O. K. in Conference of the European Chapter of the Association for Computational Linguistics. 1053–1062 (Association for Computational Linguistics, 2017).
Wan, J., Yang, J., Wang, Z. & Hua, Q. Artificial intelligence for cloud-assisted smart factory. IEEE Access 6, 55419–55430 (2018).
Cui, Y. et al. Deep learning for image and point cloud fusion in autonomous driving: a review. IEEE Trans. Intell. Transp. Syst. 23, 722–739 (2022).
Naylor, M. & Runciman, C. in Implementation and Application of Functional Languages The reduceron: Widening the von neumann bottleneck for graph reduction using an fpga (eds Chitil, O., Horváth, Z. & Zsók, V.) 129–146 (Springer, 2008).
Miller, D. A. B. Attojoule optoelectronics for low-energy information processing and communications. J. Lightwave Technol. 35, 346–396 (2017).
Theis, T. N. & Wong, H. S. P. The end of moore’s law: a new beginning for information technology. Comput. Sci. Eng. 19, 41–50 (2017).
Markram, H. et al. Reconstruction and simulation of neocortical microcircuitry. Cell 163, 456–492 (2015).
Nazirzadeh, M., Shamsabardeh, M. & Ben Yoo, S. J. in Conference on Lasers and Electro-Optics. ATh3Q.2 (Optica Publishing Group, 2018).
Fei, Y. et al. Design of the low-loss waveguide coil for interferometric integrated optic gyroscopes. J. Semicond. 38, 044009 (2017).
Slavík, R., Park, Y., Kulishov, M., Morandotti, R. & Azaña, J. Ultrafast all-optical differentiators. Opt. Express 14, 10699–10707 (2006).
Huang, J., Li, C., Lu, R., Li, L. & Cao, Z. Beyond the 100 gbaud directly modulated laser for short reach applications. J. Semicond. 42, 041306 (2021).
Feldmann, J. et al. Parallel convolutional processing using an integrated photonic tensor core. Nature 589, 52–58 (2021).
Wang, M. et al. High-frequency characterization of high-speed modulators and photodetectors in a link with low-speed photonic sampling. J. Semicond. 42, 042303 (2021).
Lin, X. et al. All-optical machine learning using diffractive deep neural networks. Science 361, 1004–1008 (2018).
Zuo, Y. et al. All-optical neural network with nonlinear activation functions. Optica 6, 1132–1137 (2019).
Zhou, T. et al. In situ optical backpropagation training of diffractive optical neural networks. Photonics Res. 8, 940–953 (2020).
Kagalwala, K. H., Di Giuseppe, G., Abouraddy, A. F. & Saleh, B. E. A. Single-photon three-qubit quantum logic using spatial light modulators. Nat. Commun. 8, 739 (2017).
Luo, Y. et al. Design of task-specific optical systems using broadband diffractive neural networks. Light Sci. Appl. 8, 112 (2019).
Qian, C. et al. Performing optical logic operations by a diffractive neural network. Light Sci. Appl 9, 59 (2020).
Zhu, H. H. et al. Space-efficient optical computing with an integrated chip diffractive neural network. Nat. Commun. 13, 1044 (2022).
Shen, Y. et al. Deep learning with coherent nanophotonic circuits. Nat. Photonics 11, 441–446 (2017).
Zhang, H. et al. An optical neural chip for implementing complex-valued neural network. Nat. Commun. 12, 457 (2021).
Xu, S. et al. Optical coherent dot-product chip for sophisticated deep learning regression. Light Sci. Appl. 10, 221 (2021).
Pai, S. et al. Parallel programming of an arbitrary feedforward photonic network. IEEE J. Sel. Top. Quantum Electron. 26, 6100813 (2020).
Hughes, T. W., Minkov, M., Shi, Y. & Fan, S. H. Training of photonic neural networks through in situ backpropagation and gradient measurement. Optica 5, 864–871 (2018).
Tang, R., Tanomura, R., Tanemura, T. & Nakano, Y. Ten-port unitary optical processor on a silicon photonic chip. ACS Photonics 8, 2074–2080 (2021).
Qu, Y. R. et al. Inverse design of an integrated-nanophotonics optical neural network. Sci. Bull. 65, 1177–1183 (2020).
Khoram, E. et al. Nanophotonic media for artificial neural inference. Photonics Res. 7, 823–827 (2019).
Tait, A. N. et al. Neuromorphic photonic networks using silicon photonic weight banks. Sci. Rep. 7, 7430 (2017).
Feldmann, J., Youngblood, N., Wright, C. D., Bhaskaran, H. & Pernice, W. H. P. All-optical spiking neurosynaptic networks with self-learning capabilities. Nature 569, 208–214 (2019).
Xu, X. et al. 11 tops photonic convolutional accelerator for optical neural networks. Nature 589, 44–51 (2021).
Meng, X. Y., Shi, N. N., Shi, D. F., Li, W. & Li, M. Photonics-enabled spiking timing-dependent convolutional neural network for real-time image classification. Opt. Express 30, 16217–16228 (2022).
Lin, Z., Sun, S., Azana, J., Li, W. & Li, M. High-speed serial deep learning through temporal optical neurons. Opt. Express 29, 19392–19402 (2021).
Huang, L. & Yao, J. Optical processor for a binarized neural network. Opt. Lett. 47, 3892–3895 (2022).
Meng, X. et al. On-demand reconfigurable incoherent optical matrix operator for real-time video image display. J. Lightwave Technol. 41, 1637–1648 (2023).
Xiao, X. et al. Large-scale and energy-efficient tensorized optical neural networks on III–V-on-silicon moscap platform. APL Photonics 6, 126107 (2021).
Zhou, H. et al. Photonic matrix multiplication lights up photonic accelerator and beyond. Light Sci. Appl. 11, 30 (2022).
Nahmias, M. A. et al. Photonic multiply-accumulate operations for neural networks. IEEE J. Sel. Top. Quantum Electron. 26, 7701518 (2020).
Clements, W. R., Humphreys, P. C., Metcalf, B. J., Kolthammer, W. S. & Walmsley, I. A. Optimal design for universal multiport interferometers. Optica 3, 1460–1465 (2016).
Lecun, Y., Bottou, L., Bengio, Y. & Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 86, 2278–2324 (1998).
Horn, R. A. in Proc. Symposia in Applied Mathematics 87–169 (American Mathematical Society, 1990).
Marpaung, D. et al. Integrated microwave photonics. Laser Photonics Rev. 7, 506–538 (2013).
Nair, V. & Hinton, G. E. in International Conference on Machine Learning 1–8 (International Machine Learning Society, 2010).
Rumelhart, D. E., Hinton, G. E. & Williams, R. J. Learning Internal Representations by Error Propagation (California Univ San Diego La Jolla Inst for Cognitive Science, 1985).
Kushner, H. & Yin, G. G. Stochastic Approximation and Recursive Algorithms and Applications, Vol. 35 (Springer Science & Business Media, 2003).
Robbins, H. & Monro, S. A stochastic approximation method. Ann. Math. Stat. 22, 400–407 (1951).
Filipovich, M. J. et al. Silicon photonic architecture for training deep neural networks with direct feedback alignment. Optica 9, 1323–1332 (2022).
Sludds, A. et al. Delocalized photonic deep learning on the internet’s edge. Science 378, 270–276 (2022).
Xu, S., Wang, J., Wang, R., Chen, J. & Zou, W. High-accuracy optical convolution unit architecture for convolutional neural networks by cascaded acousto-optical modulator arrays. Opt. Express 27, 19778–19787 (2019).
Wu, C. et al. Programmable phase-change metasurfaces on waveguides for multimode photonic convolutional neural network. Nat. Commun. 12, 96 (2021).
Mahmoodi, M. R. & Strukov, D. in Proceedings of the 55th Annual Design Automation Conference. 1–6 (Association for Computing Machinery, 2018).
Acknowledgements
This work was supported by the Youth Innovation Promotion Association of Chinese Academy of Sciences under grant no. 2022111 (N.S.) and the National Natural Science Foundation of China under grant nos. 62235011 (N.S.), 62075212 (N.S.) and 61925505 (M.L.).
Author information
Authors and Affiliations
Contributions
M.L. and N.S. conceptualized this study. N.S. and X.M. came up with the methods. G.Z. designed the chip layout. X.M. and G.Z. carried out experiments. X.M. and G.L. visualized the data. M.L. and N.S. supervised the work. X.M., G.Z., and N.S. wrote the original manuscript. J.A., J.C., J.Y., Y.S., W.L., N.Z., and M.L. revised and edited the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Thomas Van Vaerenbergh, Bowei Dong and the other, anonymous, reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Source data
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Meng, X., Zhang, G., Shi, N. et al. Compact optical convolution processing unit based on multimode interference. Nat Commun 14, 3000 (2023). https://doi.org/10.1038/s41467-023-38786-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-023-38786-x
This article is cited by
-
Correlated optical convolutional neural network with “quantum speedup”
Light: Science & Applications (2024)
-
Analog spatiotemporal feature extraction for cognitive radio-frequency sensing with integrated photonics
Light: Science & Applications (2024)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
