
Abstract
Mechanical sources of nonlinear damping play a central role in modern physics, from solid-state physics to thermodynamics. The microscopic theory of mechanical dissipation suggests that nonlinear damping of a resonant mode can be strongly enhanced when it is coupled to a vibration mode that is close to twice its resonance frequency. To date, no experimental evidence of this enhancement has been realized. In this letter, we experimentally show that nanoresonators driven into parametric-direct internal resonance provide supporting evidence for the microscopic theory of nonlinear dissipation. By regulating the drive level, we tune the parametric resonance of a graphene nanodrum over a range of 40–70 MHz to reach successive two-to-one internal resonances, leading to a nearly two-fold increase of the nonlinear damping. Our study opens up a route towards utilizing modal interactions and parametric resonance to realize resonators with engineered nonlinear dissipation over wide frequency range.
Similar content being viewed by others


Introduction
In nature, from macro- to nanoscale, dynamical systems evolve towards thermal equilibrium while exchanging energy with their surroundings. Dissipative mechanisms that mediate this equilibration convert energy from the dynamical system of interest to heat in an environmental bath. This process can be intricate, nonlinear, and in most cases hidden behind the veil of linear viscous damping, which is merely an approximation valid for small amplitude oscillations.
In the last decade, nonlinear dissipation has attracted much attention with applications that span nanomechanics1, materials science2, biomechanics3, thermodynamics4, spintronics,5 and quantum information6. It has been shown that the nonlinear dissipation process follows the empirical force model \({F}_{d}=-{\tau }_{{\rm{nl1}}}{x}^{2}\dot{x}\) where τnl1 is the nonlinear damping coefficient, x is the displacement, and \(\dot{x}\) velocity. To date, the physical mechanism from which this empirical damping force originates has remained ambiguous, with a diverse range of phenomena being held responsible including viscoelasticity7, phonon–phonon interactions8,9, Akheizer relaxation10, and mode coupling11. The fact that nonlinear damping can stem from multiple origins simultaneously makes isolating one route from the others a daunting task, especially since the nonlinear damping coefficient τnl1 is perceived to be a fixed parameter that unlike stiffness12,13,14, quality factor15, and nonlinear stiffness16,17,18, cannot be tuned easily.
Amongst the different mechanisms that affect nonlinear damping, intermodal coupling is particularly interesting, as it can be enhanced near internal resonance (IR), a special condition at which the ratio of the resonance frequencies of the coupled modes is a rational number19. This phenomenon has frequently been observed in nano/micromechanical resonators20,21,22,23,24,25,26,27,28,29. At IR, modes can interact strongly even if their nonlinear coupling is relatively weak. Interestingly, IR is closely related to the effective stiffness of resonance modes, and can therefore be manipulated by careful engineering of the geometry of mechanical systems, their spring hardening nonlinearity30,31, and electrostatic spring softening29. IR also finds its route in the microscopic theory of dissipation proposed back in 1975, where it was hypothesized to lead to a significantly shorter relaxation time if there exists a resonance mode in the vicinity of twice the resonance frequency of the driven mode in the density of states32.
Here, we demonstrate that nonlinear damping of graphene nanodrums can be strongly enhanced by parametric–direct IR, providing supporting evidence for the microscopic theory of nonlinear dissipation10,32. To achieve this, we bring the fundamental mode of the nanodrum into parametric resonance at twice its resonance frequency, allowing it to be tuned over a wide frequency range from 40 to 70 MHz. We extract the nonlinear damping as a function of the parametric drive level, and observe that it increases as much as 80% when the frequency shift of the parametric resonance brings it into IR with a higher mode. By comparing the characteristic dependence of the nonlinear damping coefficient on parametric drive to a theoretical model, we confirm that IR can be held accountable for the significant increase in nonlinear damping.
Results
Measurements
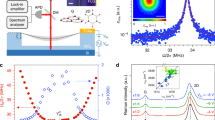
Experiments are performed on a 10 nm thick multilayer graphene nanodrum with a diameter of 5 µm, which is transferred over a cavity etched in a layer of SiO2 with a depth of 285 nm. A blue laser is used to thermomechanically actuate the membrane, where a red laser is being used to detect the motion, using interferometry (see “Methods” for details). A schematic of the setup is shown in Fig. 1a.

a Fabry–Pérot interferometry with thermomechanical actuation and microscope image of the graphene. Experiments are performed in vacuum at 10−3 mbar. Red laser is used to detect the motion of the graphene drum and the blue laser is used to optothermally actuate it. BE beam expander, QWP quarter wave plate, PBS polarized beam splitter, PD photodiode, DM dichroic mirror, VNA vector network analyzer, \({{\rm{V}}}_{a{c}_{in}}\) analyzer port, \({{\rm{V}}}_{{{\rm{ac}}}_{{\rm{out}}}}\) excitation port. In the device schematic, Si and SiO2 layers are represented by orange and blue colors, respectively. b Direct frequency response curve of the device (motion amplitude vs. drive frequency), showing multiple resonances (drive level = −12.6 dBm). The mode shapes are simulated by COMSOL. Resonance peaks are associated with \({f}_{m,n}^{(k)}\) where m represents the number of nodal diameters, n nodal circles, and k = 1, 2 stand for the first and second asymmetric degenerate modes. Dashed line shows 2f0,1, which is the drive frequency where the parametric resonance of mode f0,1 is activated. c Parametric resonance curves (calibrated motion amplitude vs. drive frequency), driven at twice the detection frequency. As the parametric resonance curves approach the 2:1 internal resonance (IR), fSNB first locks to 2:1 IR frequency and consecutively saddle-node bifurcation surges to a higher frequency and amplitude. ASNB and fSNB stand for the amplitude and frequency of saddle-node bifurcation. d Variation of the nonlinear damping τnl1 as a function of drive F1. Dashed lines represent different regimes of nonlinear damping. White region represents a constant nonlinear damping, purple region an increase in nonlinear damping in the vicinity of 2:1 IR and orange region an increase in nonlinear damping due to IR with a higher mode.
By sweeping the drive frequency, we obtain the frequency response of the nanodrum in which multiple directly driven resonance modes can be identified (Fig. 1b). We find the fundamental axisymmetric mode of vibration at f0,1=20.1 MHz and several other modes, of which the two modes, at \({f}_{2,1}^{(1)}\) = 47.4 MHz and \({f}_{2,1}^{(2)}\) = 50.0 MHz, are of particular interest. This is because, to study the effect of IR on nonlinear damping, we aim to achieve a 2:1 IR by parametrically driving the fundamental mode, such that it coincides with one of the higher frequency modes. The frequency ratios \({f}_{2,1}^{(1)}/{f}_{0,1}\approx 2.3\) and \({f}_{2,1}^{(2)}/{f}_{0,1}\approx 2.4\) are close to the factor 2, however additional frequency tuning is needed to reach the 2:1 IR condition.
The parametric resonance can be clearly observed by modulating the tension of the nanodrum at frequency ωF with the blue laser while using a frequency converter in the vector network analyzer (VNA) to measure the amplitude at ωF/2 as shown in Fig. 1c. By increasing the parametric drive, we observe a Duffing-type geometric nonlinearity over a large frequency range, such that the parametrically driven fundamental resonance can be tuned across successive 2:1 IR conditions with modes \({f}_{2,1}^{(1)}\) and \({f}_{2,1}^{(2)}\), respectively.
In Fig. 1c, we observe that the parametric resonance curves follow a common response until they reach the saddle-node bifurcation frequency fSNB above which the parametric resonance curve reaches its peak amplitude ASNB and drops down to low amplitude. We note that the value of ASNB can be used to determine the degree of nonlinear damping33. Therefore, to extract the nonlinear damping coefficient τnl1 of mode f0,1 from the curves in Fig. 1c, we use the following single-mode model to describe the system dynamics
in which ω1 = 2πf0,1 is the eigenfrequency of the axisymmetric mode of the nanodrum, γ is its Duffing constant, and F1 and ωF are the parametric drive amplitude and frequency, respectively. Moreover, 2τ1 = ω1/Q is the linear damping coefficient, with Q being the quality factor, and τnl1 is the nonlinear damping term of van der Pol type that prevents the parametric resonance amplitude ASNB from increasing to infinity33,34 at higher driving frequencies since ∣ASNB∣2 ∝ (2F1Q − 4)/τnl1. To identify the parameters governing the device dynamics from the measurements in Fig. 1c, we use Eq. (1) and obtain good fits of the parametric resonance curves using τnl1 and γ as fit parameters (see Supplementary Note I).
As we gradually increase the drive level, fSNB increases until it reaches the vicinity of the IR, where we observe an increase in τnl1 (Fig. 1d). Whereas fSNB increases with parametric drive F1, Fig. 1c shows that its rate of increase \(\frac{{\rm{d}}{f}_{{\rm{SNB}}}}{{\rm{d}}{F}_{1}}\) slows down close to \({f}_{2,1}^{(1)}\), locking the saddle-node bifurcation frequency when fSNB ≈ 45 MHz. At the same time, τnl1 increases significantly at the associated parametric drive levels, providing the possibility to tune nonlinear damping up to twofolds by controlling F1, as seen in Fig. 1d.
Figure 1c also shows that above a certain critical parametric drive level F1,crit, the frequency locking barrier at fSNB ≈ 45 MHz is broken and fSNB suddenly jumps to a higher frequency (≈5 MHz higher), and a corresponding larger ASNB. We label this increase in the rate \(\frac{{\rm{d}}{f}_{{\rm{SNB}}}}{{\rm{d}}{F}_{1}}\) by “surge” in Fig. 1c, where an abrupt increase in the amplitude–frequency response is observed to occur above a critical drive level F1,crit. Interestingly, even above F1,crit a further increase in τnl1 is observed with increasing drive amplitude, indicating that a similar frequency locking occurs when the parametric resonance peak reaches the second IR at \({f}_{{\rm{SNB}}}\approx {f}_{2,1}^{(2)}\). Similar nonlinear phenomena are also showcased in a second nanodrum undergoing parametric–direct modal interaction, confirming the reproducibility of the observed physics (see Supplementary Note II).
Theoretical model
Although the single-mode model in Eq. (1) can capture the response of the parametric resonance, it can only do so by introducing a nonphysical drive level dependent nonlinear damping coefficient τnl1(F1) (Fig. 1d). Therefore, to study the physical origin of our observation, we extend the model by introducing a second mode whose motion is described by generalized coordinate x2. Moreover, to describe the coupling between the interacting modes at the 2:1 IR, we use the single term coupling potential \({U}_{{\rm{cp}}}=\alpha {x}_{1}^{2}{x}_{2}\) (see Supplementary Note III). The coupled equations of motion in the presence of this potential become
The two-mode model describes a parametrically driven mode with generalized coordinate x1 coupled to x2 that has eigenfrequency \({\omega }_{2}=2\pi {f}_{2,1}^{(1)}\), damping ratio τ2, and is directly driven by a harmonic force with magnitude F2.
To understand the dynamics of the system observed experimentally and described by the model in Eq. (2), it is convenient to switch to the rotating frame of reference by transforming x1 and x2 to complex amplitude form (see Supplementary Note IV). This transformation reveals a system of equations that predicts the response of the resonator as the drive parameters (F1, F2, and ωF) are varied. Solving the coupled system at steady state yields the following algebraic equation for the amplitude a1 of the first mode
where Δω1 = ωF/2 − ω1 and Δω2 = ωF − ω2 are the frequency detuning from the primary and the secondary eigenfrequencies, and \({\tilde{\alpha }}^{2}={\alpha }^{2}/[{\omega }_{F}^{2}({\tau }_{2}^{2}+{{\Delta }}{\omega }_{2}^{2})]\) is the rescaled coupling strength. Essentially, the first squared term in Eq. (3) captures the effect of damping on the parametric resonance amplitude a1, the second term captures the effect of nonlinear coupling on the stiffness and driving frequency, and the term on the right side is the effective parametric drive. From the rescaled coupling strength \(\tilde{\alpha }\) and Eq. (3) it can be seen that the coupling \({\tilde{\alpha }}^{2}\) shows a large peak close to the 2:1 IR where ∣Δω2∣ ≈ 0. In addition, Eq. (3) shows that mode 2 will always dissipate energy from mode 1 once coupled, and that the two-mode model accounts for an increase in the effective nonlinear damping parameter (\({\tau }_{nl{\rm{eff}}}={\tau }_{{\rm{nl1}}}+{\tilde{\alpha }}^{2}{\tau }_{2}\)) near IR, in accordance with the observed peak in τnl1 with the single-mode model in Fig. 1d. It is also interesting to note that this observation in steady state is different from what has been reported in Shoshani et al.24 for transient nonlinear free vibrations of coupled modes where it was important that τ2 ≫ τ1 to observe nonlinear damping. The two-mode model of Eq. (3) allows us to obtain good fits of the parametric resonance curves in Fig. 1b, with a constant τnleff ≈ 3.4 × 1021 (Hz/m2) determined far from IR and a single coupling strength α = 2.2 × 1022 (Hz2/m) which intrinsically accounts for the variation of τnleff near IR. These fits can be found in Supplementary Note V, and demonstrate that the two-mode model is in agreement with the experiments for constant parameter values, without requiring drive level dependent fit parameters. We note that the extracted nonlinear damping parameter fits the Duffing response at f0,1 with good accuracy too (see Supplementary Note VI).
To understand the physics associated with the frequency locking and amplitude–frequency surge, we use the experimentally extracted fit parameters from the two-mode model and numerically generate parametric resonance curves using Eq. (3) for a large range of drive amplitudes (see Fig. 2a). We see that for small drive levels, an upward frequency sweep will follow the parametric resonance curve and then will lock and jump down at the first saddle-node bifurcation (SNB1) frequency, which lies close to \({f}_{{\rm{SNB}}}\approx {f}_{2,1}^{(1)}\). At higher parametric drive levels, the parametric resonance has a stable path to traverse the IR toward a group of stable states at higher frequencies.

a Color map of the analytical model response curves obtained by using the fitted parameters from experiments. Colors correspond to frequency response (motion amplitude vs. drive frequency) solutions with a certain parametric drive level. Black lines show samples from these solutions where solid lines are stable and dashed lines are unstable solutions. White dashed line is where parametric resonance meets with interacting mode and undergoes internal resonance. b The underlying route of the amplitude–frequency surge is revealed by tracing the evolution of saddle-node bifurcations (green and red squares represent theoretical SNB1 and SNB2, whereas experimental SNB1 is represented by crosses) of the parametric resonance curves.
A more extensive investigation of this phenomenon can be carried out by performing bifurcation analysis of the steady-state solutions (see Supplementary Note IV). The bifurcation analysis reveals two saddle-node bifurcations near the singular region of the IR, one at the end of the first path (SNB1) and another at the beginning of the second path (SNB2) (Fig. 2b). As the drive amplitude increases, the bifurcation pair starts to move toward each other until they annihilate one another to form a stable solution at the connecting point, which we labeled as “surge.” It is also possible to observe that the rate at which saddle-node pairs approach each other dramatically drops near the IR condition, demonstrating the “locking” which we also observed in the experiments.
To check how closely the two-mode model captures the variation of τnl1 close to the IR condition, we follow a reverse path, and fit the numerically generated resonance curves of Fig. 2a using the single-mode model of Eq. (3) with τnl1 as the fit parameter. In this way, we track the variation of τnl1 in the single-mode model with the parametric drive F1, similar to what we observed experimentally and reported in Fig. 1c. The result of this fit is shown in Fig. 3a, where a similar anomalous change of nonlinear damping is obtained for the two-mode model.

a Variation of the effective nonlinear damping parameter (τnleff) with respect to parametric drive. The τnleff is obtained by fitting the numerically generated curves of Fig. 2a as the fit parameter. Dashed lines represent different regimes of nonlinear damping. White regions represent a constant nonlinear damping and purple region represents an increase in nonlinear damping in the vicinity of 2:1 IR. b Comparison of the ratio between linear damping (τ1) and total damping (τtot). In the figure, blue and red dashed lines represent τ1/τtot obtained from uncoupled and coupled models, whereas black crosses represent experiments.
The variation of nonlinear damping affects the total damping (sum of linear and nonlinear dissipation) of the resonator too. It is of interest to study how large this effect is. In Fig. 3b, we report the variation in the ratio of the linear damping τ1 and the amplitude-dependent total damping τtot = (ω1/Q + 0.25τnleff∣x1∣2)33 in the spectral neighborhood of \({f}_{2,1}^{(1)}\), and observe a sudden decrease in the vicinity of IR. This abrupt change in the total damping is well captured by the two-mode model. With the increase in the drive amplitude, τ1/τtot values of this model though deviate from those of the experiments due to a subsequent IR at \({f}_{2,1}^{(2)}/{f}_{0,1}\approx 2.4\) that is not included in our theoretical analysis. The dependence of τ1/τtot on frequency shows that near IR, the total damping of the fundamental mode increases nearly by 80%. We note that increased nonlinear damping near IR was also observed in Güttinger et al.11. In that work, nonlinear damping was studied using ringdown measurements, with two modes brought close to an IR by electrostatic gating. The increased nonlinear damping was attributed to a direct–direct 3:1 IR, which as shown theoretically in Shoshani et al.24 leads to a high order (quintic) nonlinear damping term. Conversely, in our work, two modes are brought into parametric–direct 2:1 IR by adjusting the parametric drive level. This results in a nonlinear damping term that already comes into play at smaller amplitudes because it is of lower (cubic) order, as discussed in Shoshani et al.24. Moreover, the nonlinear damping mechanism in Güttinger et al.11 is approximately described by two exponential decays with crossovers from (τ1 + τ2)/2 to τ1, which implies that similar to Shoshani et al.24, τ2 > τ1 is required to observe positive nonlinear damping. This is in contrast with the damping mechanism we describe, where the effective nonlinear damping actually increases for smaller τ2 (see Eq. (3)).
Discussion
Since the tension of the nanodrum can be manipulated by laser heating, we can further investigate the tunability of the nonlinear damping by increasing the laser power and detecting the range over which 2:1 IR conditions may occur. When increasing the blue laser power and modulation, we observe the parametrically actuated signal also in the direct detection mode (like in Fig. 1b) due to optical readout nonlinearities35. As a result a superposition of Fig. 1b, c is obtained, as shown in Fig. 4. We note that the enhanced laser power increases membrane tension which moves f0,1 upward by a few MHz, but also allows us to reach even higher parametric modulation. In this configuration, we achieve a frequency shift in fSNB from 40 to 70 MHz, corresponding to as much as 75% tuning of the mechanical motion frequency. This large tuning can increase the number of successive IRs that can be reached even further, to reach modal interactions between the parametric mode f0,1 and direct modes \({f}_{2,1}^{(2)}\) and f0,2 (see Fig. 4). As a result, multiple amplitude–frequency surges can be detected in the large frequency range of 30 MHz over which nonlinear damping coefficient can be tuned.

The parametric resonance interacts successively with multiple directly driven modes of vibration. The arrows in the figure show successive amplitude–frequency surges. Starting from the dashed line, shaded area represents the region where nonlinear damping is tunable.
In summary, we study the tunability of nonlinear damping in a graphene nanomechanical resonator, where the fundamental mode is parametrically driven to interact with a higher mode. When the system is brought near a 2:1 IR, a significant increase in nonlinear damping is observed. In addition, the rate of increase of the parametric resonance frequency reduces in a certain locking regime, potentially stabilizing the values of fSNB and ASNB, which could potentially aid frequency noise reduction21. Interestingly, as the drive level is further increased beyond the critical level F1,crit, this locking barrier is broken, resulting in a surge in fSNB and amplitude of the resonator. These phenomena were studied experimentally, and could be accounted for using a two-mode theoretical model. The described mechanism can isolate and differentiate mode coupling induced nonlinear damping from other dissipation sources, and sheds light on the origins of nonlinear dissipation in nanomechanical resonators. It also provides a way to controllably tune nonlinear damping which complements existing methods for tuning linear damping15, linear stiffness,12,13,14 and nonlinear stiffness16,17,18, extending our toolset to adapt and study the rich nonlinear dynamics of nanoresonators.
Methods
Sample fabrication
Devices are fabricated using standard electron-beam (e-beam) lithography and dry etching techniques. A positive e-beam resist (AR-P-6200) is spin coated on a Si wafer with 285 nm of thermally grown SiO2. The cavity patterns ranging from 2 to 10 µm in diameter are exposed using the Vistec EBPG 5000+ and developed. The exposed SiO2 are subsequently etched away in a reactive ion etcher using a mixture of CHF3 and Ar gas until all the SiO2 is etched away and the Si exposed. Graphene flakes are then exfoliated from natural crystal and dry transferred on top of cavities.
Laser interferometry
The experiments are performed at room temperature in a vacuum chamber (10−3 mbar). A power modulated blue laser (λ = 405 nm) is used to thermomechanically actuate the nanodrum. The motion is then readout by using a red laser (λ = 633 nm) whose reflected intensity is modulated by the motion of the nanodrum in a Fabry–Pérot etalon formed by the graphene and the Si back mirror (Fig. 1a). The reflected red laser intensity from the center of the drum is detected using a photodiode, whose response is read by the same VNA that modulates the blue laser. The measured VNA signal is then converted to displacement in nanometers using a nonlinear optical calibration method35 (see Supplementary Note VII).
Data availability
The data that support the findings of this study are available from the corresponding authors upon request.
References
Eichler, A. et al. Nonlinear damping in mechanical resonators made from carbon nanotubes and graphene. Nat. Nanotechnol. 6, 339–342 (2011).
Amabili, M. Derivation of nonlinear damping from viscoelasticity in case of nonlinear vibrations. Nonlinear Dyn. 97, 1785–1797 (2019).
Amabili, M. et al. Nonlinear dynamics of human aortas for material characterization. Phys. Rev. X 10, 011015 (2020).
Midtvedt, D., Croy, A., Isacsson, A., Qi, Z. & Park, H. S. Fermi-pasta-ulam physics with nanomechanical graphene resonators: intrinsic relaxation and thermalization from flexural mode coupling. Phys. Rev. Lett. 112, 145503 (2014).
Divinskiy, B., Urazhdin, S., Demokritov, S. O. & Demidov, V. E. Controlled nonlinear magnetic damping in spin-hall nano-devices. Nat. Commun. 10, 5211 (2019).
Leghtas, Z. et al. Confining the state of light to a quantum manifold by engineered two-photon loss. Science 347, 853–857 (2015).
Zaitsev, S., Shtempluck, O., Buks, E. & Gottlieb, O. Nonlinear damping in a micromechanical oscillator. Nonlinear Dyn. 67, 859–883 (2012).
Croy, A., Midtvedt, D., Isacsson, A. & Kinaret, J. M. Nonlinear damping in graphene resonators. Phys. Rev. B 86, 235435 (2012).
Dong, X., Dykman, M. I. & Chan, H. B. Strong negative nonlinear friction from induced two-phonon processes in vibrational systems. Nat. Commun. 9, 3241 (2018).
Atalaya, J., Kenny, T. W., Roukes, M. & Dykman, M. Nonlinear damping and dephasing in nanomechanical systems. Phys. Rev. B 94, 195440 (2016).
Güttinger, J. et al. Energy-dependent path of dissipation in nanomechanical resonators. Nat. Nanotechnol. 12, 631 (2017).
Song, X. et al. Stamp transferred suspended graphene mechanical resonators for radio frequency electrical readout. Nano Lett. 12, 198–202 (2012).
Sajadi, B. et al. Experimental characterization of graphene by electrostatic resonance frequency tuning. J. Appl. Phys. 122, 234302 (2017).
Lee, M. et al. Sealing graphene nanodrums. Nano Lett. 19, 5313–5318 (2019).
Miller, J. M. L. et al. Effective quality factor tuning mechanisms in micromechanical resonators. Appl. Phys. Rev. 5, 041307 (2018).
Weber, P., Guttinger, J., Tsioutsios, I., Chang, D. E. & Bachtold, A. Coupling graphene mechanical resonators to superconducting microwave cavities. Nano Lett. 14, 2854–2860 (2014).
Samanta, C., Arora, N. & Naik, A. Tuning of geometric nonlinearity in ultrathin nanoelectromechanical systems. Appl. Phys. Lett. 113, 113101 (2018).
Yang, F. et al. Persistent response and nonlinear coupling of flexural modes in ultra-strongly driven membrane resonators. https://arxiv.org/abs/2003.14207 (2020).
Nayfeh, A. H. & Mook, D. T. Nonlinear Oscillations (John Wiley & Sons, 1995).
Westra, H. J. R., Poot, M., van der Zant, H. S. J. & Venstra, W. J. Nonlinear modal interactions in clamped-clamped mechanical resonators. Phys. Rev. Lett. 105, 117205 (2010).
Antonio, D., Zanette, D. H. & López, D. Frequency stabilization in nonlinear micromechanical oscillators. Nat. Commun. 3, 1–6 (2012).
Eichler, A., del Álamo Ruiz, M., Plaza, J. & Bachtold, A. Strong coupling between mechanical modes in a nanotube resonator. Phys. Rev. Lett. 109, 025503 (2012).
Chen, C., Zanette, D. H., Czaplewski, D. A., Shaw, S. & López, D. Direct observation of coherent energy transfer in nonlinear micromechanical oscillators. Nat. Commun. 8, 15523 (2017).
Shoshani, O., Shaw, S. W. & Dykman, M. I. Anomalous decay of nanomechanical modes going through nonlinear resonance. Sci. Rep. 7, 18091 (2017).
Czaplewski, D. A. et al. Bifurcation generated mechanical frequency comb. Phys. Rev. Lett. 121, 244302 (2018).
Czaplewski, D. A., Strachan, S., Shoshani, O., Shaw, S. W. & López, D. Bifurcation diagram and dynamic response of a mems resonator with a 1: 3 internal resonance. Appl. Phys. Lett. 114, 254104 (2019).
Yang, F. et al. Spatial modulation of nonlinear flexural vibrations of membrane resonators. Phys. Rev. Lett. 122, 154301 (2019).
Houri, S., Hatanaka, D., Asano, M. & Yamaguchi, H. Demonstration of multiple internal resonances in a microelectromechanical self-sustained oscillator. Phys. Rev. Appl. 13, 014049 (2020).
Van der Avoort, C. et al. Amplitude saturation of mems resonators explained by autoparametric resonance. J. Micromech. Microeng. 20, 105012 (2010).
Westra, H. J. R. et al. Interactions between directly- and parametrically-driven vibration modes in a micromechanical resonator. Phys. Rev. B 84, 134305 (2011).
Davidovikj, D. et al. Nonlinear dynamic characterization of two-dimensional materials. Nat. Commun. 8, 1253 (2017).
Dykman, M. & Krivoglaz, M. Spectral distribution of nonlinear oscillators with nonlinear friction due to a medium. Phys. Status Solidi 68, 111–123 (1975).
Lifshitz, R. & Cross, M. Nonlinear dynamics of nanomechanical and micromechanical resonators. Rev. Nonlinear Dyn. Complex. 1, 1–52 (2008).
Dolleman, R. J. et al. Opto-thermally excited multimode parametric resonance in graphene membranes. Sci. Rep. 8, 9366 (2018).
Dolleman, R. J., Davidovikj, D., van der Zant, H. S. J. & Steeneken, P. G. Amplitude calibration of 2d mechanical resonators by nonlinear optical transduction. Appl. Phys. Lett. 111, 253104 (2017).
Acknowledgements
The authors would like to thank Prof. Marco Amabili for fruitful discussions about nonlinear damping. The research leading to these results received funding from European Union’s Horizon 2020 research and innovation program under Grant Agreement 802093 (ERC starting grant ENIGMA). O.S. acknowledges support for this work from the United States–Israel Binational Science Foundation under Grant No. 2018041. P.G.S. and H.S.J.v.d.Z. acknowledge funding from the European Union’s Horizon 2020 research and innovation program under grant agreement numbers 785219 and 881603 (Graphene Flagship).
Author information
Authors and Affiliations
Contributions
A.K., O.S., H.S.J.v.d.Z., P.G.S., and F.A. conceived the experiments; A.K. fabricated the graphene samples and conducted the measurements; M.L. fabricated the chips with cavities; O.S. built the theoretical model; O.S. and A.K. performed the fitting; A.K., O.S., P.G.S. and F.A. did data analysis and interpretation; F.A. supervised the project; and the manuscript was written by A.K. and F.A. with inputs from all authors.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Peer review information Nature Communications thanks Adrian Bachtold and the other anonymous reviewer(s) for their contribution to the peer review of this work. Peer reviewer reports are available.
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Keşkekler, A., Shoshani, O., Lee, M. et al. Tuning nonlinear damping in graphene nanoresonators by parametric–direct internal resonance. Nat Commun 12, 1099 (2021). https://doi.org/10.1038/s41467-021-21334-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-021-21334-w
This article is cited by
-
Strain engineering of nonlinear nanoresonators from hardening to softening
Communications Physics (2024)
-
Size-dependent longitudinal–transverse mode interaction of fluid-conveying nanotubes under base excitation
Nonlinear Dynamics (2024)
-
Frequency unlocking-based MEMS bifurcation sensors
Microsystems & Nanoengineering (2023)
-
Nonlinear damping in micromachined bridge resonators
Nonlinear Dynamics (2023)
-
A hybrid averaging and harmonic balance method for weakly nonlinear asymmetric resonators
Nonlinear Dynamics (2023)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
