
Abstract
The theory of reinforcement learning provides a normative account1, deeply rooted in psychological2 and neuroscientific3 perspectives on animal behaviour, of how agents may optimize their control of an environment. To use reinforcement learning successfully in situations approaching real-world complexity, however, agents are confronted with a difficult task: they must derive efficient representations of the environment from high-dimensional sensory inputs, and use these to generalize past experience to new situations. Remarkably, humans and other animals seem to solve this problem through a harmonious combination of reinforcement learning and hierarchical sensory processing systems4,5, the former evidenced by a wealth of neural data revealing notable parallels between the phasic signals emitted by dopaminergic neurons and temporal difference reinforcement learning algorithms3. While reinforcement learning agents have achieved some successes in a variety of domains6,7,8, their applicability has previously been limited to domains in which useful features can be handcrafted, or to domains with fully observed, low-dimensional state spaces. Here we use recent advances in training deep neural networks9,10,11 to develop a novel artificial agent, termed a deep Q-network, that can learn successful policies directly from high-dimensional sensory inputs using end-to-end reinforcement learning. We tested this agent on the challenging domain of classic Atari 2600 games12. We demonstrate that the deep Q-network agent, receiving only the pixels and the game score as inputs, was able to surpass the performance of all previous algorithms and achieve a level comparable to that of a professional human games tester across a set of 49 games, using the same algorithm, network architecture and hyperparameters. This work bridges the divide between high-dimensional sensory inputs and actions, resulting in the first artificial agent that is capable of learning to excel at a diverse array of challenging tasks.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout




Similar content being viewed by others


References
Sutton, R. & Barto, A. Reinforcement Learning: An Introduction (MIT Press, 1998)
Thorndike, E. L. Animal Intelligence: Experimental studies (Macmillan, 1911)
Schultz, W., Dayan, P. & Montague, P. R. A neural substrate of prediction and reward. Science 275, 1593–1599 (1997)
Serre, T., Wolf, L. & Poggio, T. Object recognition with features inspired by visual cortex. Proc. IEEE. Comput. Soc. Conf. Comput. Vis. Pattern. Recognit. 994–1000 (2005)
Fukushima, K. Neocognitron: A self-organizing neural network model for a mechanism of pattern recognition unaffected by shift in position. Biol. Cybern. 36, 193–202 (1980)
Tesauro, G. Temporal difference learning and TD-Gammon. Commun. ACM 38, 58–68 (1995)
Riedmiller, M., Gabel, T., Hafner, R. & Lange, S. Reinforcement learning for robot soccer. Auton. Robots 27, 55–73 (2009)
Diuk, C., Cohen, A. & Littman, M. L. An object-oriented representation for efficient reinforcement learning. Proc. Int. Conf. Mach. Learn. 240–247 (2008)
Bengio, Y. Learning deep architectures for AI. Foundations and Trends in Machine Learning 2, 1–127 (2009)
Krizhevsky, A., Sutskever, I. & Hinton, G. ImageNet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 25, 1106–1114 (2012)
Hinton, G. E. & Salakhutdinov, R. R. Reducing the dimensionality of data with neural networks. Science 313, 504–507 (2006)
Bellemare, M. G., Naddaf, Y., Veness, J. & Bowling, M. The arcade learning environment: An evaluation platform for general agents. J. Artif. Intell. Res. 47, 253–279 (2013)
Legg, S. & Hutter, M. Universal Intelligence: a definition of machine intelligence. Minds Mach. 17, 391–444 (2007)
Genesereth, M., Love, N. & Pell, B. General game playing: overview of the AAAI competition. AI Mag. 26, 62–72 (2005)
Bellemare, M. G., Veness, J. & Bowling, M. Investigating contingency awareness using Atari 2600 games. Proc. Conf. AAAI. Artif. Intell. 864–871 (2012)
McClelland, J. L., Rumelhart, D. E. & Group, T. P. R. Parallel Distributed Processing: Explorations in the Microstructure of Cognition (MIT Press, 1986)
LeCun, Y., Bottou, L., Bengio, Y. & Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 86, 2278–2324 (1998)
Hubel, D. H. & Wiesel, T. N. Shape and arrangement of columns in cat’s striate cortex. J. Physiol. 165, 559–568 (1963)
Watkins, C. J. & Dayan, P. Q-learning. Mach. Learn. 8, 279–292 (1992)
Tsitsiklis, J. & Roy, B. V. An analysis of temporal-difference learning with function approximation. IEEE Trans. Automat. Contr. 42, 674–690 (1997)
McClelland, J. L., McNaughton, B. L. & O’Reilly, R. C. Why there are complementary learning systems in the hippocampus and neocortex: insights from the successes and failures of connectionist models of learning and memory. Psychol. Rev. 102, 419–457 (1995)
O’Neill, J., Pleydell-Bouverie, B., Dupret, D. & Csicsvari, J. Play it again: reactivation of waking experience and memory. Trends Neurosci. 33, 220–229 (2010)
Lin, L.-J. Reinforcement learning for robots using neural networks. Technical Report, DTIC Document. (1993)
Riedmiller, M. Neural fitted Q iteration - first experiences with a data efficient neural reinforcement learning method. Mach. Learn.: ECML 3720, 317–328 (Springer, 2005)
Van der Maaten, L. J. P. & Hinton, G. E. Visualizing high-dimensional data using t-SNE. J. Mach. Learn. Res. 9, 2579–2605 (2008)
Lange, S. & Riedmiller, M. Deep auto-encoder neural networks in reinforcement learning. Proc. Int. Jt. Conf. Neural. Netw. 1–8 (2010)
Law, C.-T. & Gold, J. I. Reinforcement learning can account for associative and perceptual learning on a visual decision task. Nature Neurosci. 12, 655 (2009)
Sigala, N. & Logothetis, N. K. Visual categorization shapes feature selectivity in the primate temporal cortex. Nature 415, 318–320 (2002)
Bendor, D. & Wilson, M. A. Biasing the content of hippocampal replay during sleep. Nature Neurosci. 15, 1439–1444 (2012)
Moore, A. & Atkeson, C. Prioritized sweeping: reinforcement learning with less data and less real time. Mach. Learn. 13, 103–130 (1993)
Jarrett, K., Kavukcuoglu, K., Ranzato, M. A. & LeCun, Y. What is the best multi-stage architecture for object recognition? Proc. IEEE. Int. Conf. Comput. Vis. 2146–2153 (2009)
Nair, V. & Hinton, G. E. Rectified linear units improve restricted Boltzmann machines. Proc. Int. Conf. Mach. Learn. 807–814 (2010)
Kaelbling, L. P., Littman, M. L. & Cassandra, A. R. Planning and acting in partially observable stochastic domains. Artificial Intelligence 101, 99–134 (1994)
Acknowledgements
We thank G. Hinton, P. Dayan and M. Bowling for discussions, A. Cain and J. Keene for work on the visuals, K. Keller and P. Rogers for help with the visuals, G. Wayne for comments on an earlier version of the manuscript, and the rest of the DeepMind team for their support, ideas and encouragement.
Author information
Authors and Affiliations
Contributions
V.M., K.K., D.S., J.V., M.G.B., M.R., A.G., D.W., S.L. and D.H. conceptualized the problem and the technical framework. V.M., K.K., A.A.R. and D.S. developed and tested the algorithms. J.V., S.P., C.B., A.A.R., M.G.B., I.A., A.K.F., G.O. and A.S. created the testing platform. K.K., H.K., S.L. and D.H. managed the project. K.K., D.K., D.H., V.M., D.S., A.G., A.A.R., J.V. and M.G.B. wrote the paper.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Extended data figures and tables
Extended Data Figure 1 Two-dimensional t-SNE embedding of the representations in the last hidden layer assigned by DQN to game states experienced during a combination of human and agent play in Space Invaders.
The plot was generated by running the t-SNE algorithm25 on the last hidden layer representation assigned by DQN to game states experienced during a combination of human (30 min) and agent (2 h) play. The fact that there is similar structure in the two-dimensional embeddings corresponding to the DQN representation of states experienced during human play (orange points) and DQN play (blue points) suggests that the representations learned by DQN do indeed generalize to data generated from policies other than its own. The presence in the t-SNE embedding of overlapping clusters of points corresponding to the network representation of states experienced during human and agent play shows that the DQN agent also follows sequences of states similar to those found in human play. Screenshots corresponding to selected states are shown (human: orange border; DQN: blue border).
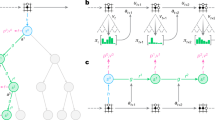
Extended Data Figure 2 Visualization of learned value functions on two games, Breakout and Pong.
a, A visualization of the learned value function on the game Breakout. At time points 1 and 2, the state value is predicted to be ∼17 and the agent is clearing the bricks at the lowest level. Each of the peaks in the value function curve corresponds to a reward obtained by clearing a brick. At time point 3, the agent is about to break through to the top level of bricks and the value increases to ∼21 in anticipation of breaking out and clearing a large set of bricks. At point 4, the value is above 23 and the agent has broken through. After this point, the ball will bounce at the upper part of the bricks clearing many of them by itself. b, A visualization of the learned action-value function on the game Pong. At time point 1, the ball is moving towards the paddle controlled by the agent on the right side of the screen and the values of all actions are around 0.7, reflecting the expected value of this state based on previous experience. At time point 2, the agent starts moving the paddle towards the ball and the value of the ‘up’ action stays high while the value of the ‘down’ action falls to −0.9. This reflects the fact that pressing ‘down’ would lead to the agent losing the ball and incurring a reward of −1. At time point 3, the agent hits the ball by pressing ‘up’ and the expected reward keeps increasing until time point 4, when the ball reaches the left edge of the screen and the value of all actions reflects that the agent is about to receive a reward of 1. Note, the dashed line shows the past trajectory of the ball purely for illustrative purposes (that is, not shown during the game). With permission from Atari Interactive, Inc.
Supplementary information
Supplementary Information
This file contains a Supplementary Discussion. (PDF 110 kb)
Performance of DQN in the Game Space Invaders
This video shows the performance of the DQN agent while playing the game of Space Invaders. The DQN agent successfully clears the enemy ships on the screen while the enemy ships move down and sideways with gradually increasing speed. (MOV 5106 kb)
Demonstration of Learning Progress in the Game Breakout
This video shows the improvement in the performance of DQN over training (i.e. after 100, 200, 400 and 600 episodes). After 600 episodes DQN finds and exploits the optimal strategy in this game, which is to make a tunnel around the side, and then allow the ball to hit blocks by bouncing behind the wall. Note: the score is displayed at the top left of the screen (maximum for clearing one screen is 448 points), number of lives remaining is shown in the middle (starting with 5 lives), and the “1” on the top right indicates this is a 1-player game. (MOV 1500 kb)
Rights and permissions
About this article

Cite this article
Mnih, V., Kavukcuoglu, K., Silver, D. et al. Human-level control through deep reinforcement learning. Nature 518, 529–533 (2015). https://doi.org/10.1038/nature14236
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/nature14236
This article is cited by
-
Deep learning models to predict the editing efficiencies and outcomes of diverse base editors
Nature Biotechnology (2024)
-
Optimizing warfarin dosing for patients with atrial fibrillation using machine learning
Scientific Reports (2024)
-
Spectrum-efficient user grouping and resource allocation based on deep reinforcement learning for mmWave massive MIMO-NOMA systems
Scientific Reports (2024)
-
Assuring Efficient Path Selection in an Intent-Based Networking System: A Graph Neural Networks and Deep Reinforcement Learning Approach
Journal of Network and Systems Management (2024)
-
Reward Function Design Method for Long Episode Pursuit Tasks Under Polar Coordinate in Multi-Agent Reinforcement Learning
Journal of Shanghai Jiaotong University (Science) (2024)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
