
Abstract
Collective behaviour enhances environmental sensing and decision-making in groups of animals1,2. Experimental and theoretical investigations of schooling fish, flocking birds and human crowds have demonstrated that simple interactions between individuals can explain emergent group dynamics3,4. These findings indicate the existence of neural circuits that support distributed behaviours, but the molecular and cellular identities of relevant sensory pathways are unknown. Here we show that Drosophila melanogaster exhibits collective responses to an aversive odour: individual flies weakly avoid the stimulus, but groups show enhanced escape reactions. Using high-resolution behavioural tracking, computational simulations, genetic perturbations, neural silencing and optogenetic activation we demonstrate that this collective odour avoidance arises from cascades of appendage touch interactions between pairs of flies. Inter-fly touch sensing and collective behaviour require the activity of distal leg mechanosensory sensilla neurons and the mechanosensory channel NOMPC5,6. Remarkably, through these inter-fly encounters, wild-type flies can elicit avoidance behaviour in mutant animals that cannot sense the odour—a basic form of communication. Our data highlight the unexpected importance of social context in the sensory responses of a solitary species and open the door to a neural-circuit-level understanding of collective behaviour in animal groups.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout




Similar content being viewed by others

References
Berdahl, A., Torney, C. J., Ioannou, C. C., Faria, J. J. & Couzin, I. D. Emergent sensing of complex environments by mobile animal groups. Science 339, 574–576 (2013)
Ward, A. J., Herbert-Read, J. E., Sumpter, D. J. T. & Krause, J. Fast and accurate decisions through collective vigilance in fish shoals. Proc. Natl Acad. Sci. USA 108, 2312–2315 (2011)
Couzin, I. D. Collective cognition in animal groups. Trends Cogn. Sci. 13, 36–43 (2009)
Sumpter, D., Buhl, J., Biro, D. & Couzin, I. D. Information transfer in moving animal groups. Theory Biosci. 127, 177–186 (2008)
Walker, R. G., Willingham, A. & Zuker, C. A Drosophila mechanosensory transduction channel. Science 287, 2229–2234 (2000)
Yan, Z. et al. Drosophila NOMPC is a mechanotransduction channel subunit for gentle-touch sensation. Nature 493, 221–225 (2013)
Gullan, P. J. & Cranston, P. S. The Insects (Wiley, 2010)
Schneider, J., Atallah, J. & Levine, J. D. One, two, and many—a perspective on what groups of Drosophila melanogaster can tell us about social dynamics. Adv. Genet. 77, 59–78 (2012)
Levine, J. D., Funes, P., Dowse, H. B. & Hall, J. C. Resetting the circadian clock by social experience in Drosophila melanogaster. Science 298, 2010–2012 (2002)
Wang, L. & Anderson, D. J. Identification of an aggression-promoting pheromone and its receptor neurons in Drosophila. Nature 463, 227–231 (2010)
Suh, G. S. B. et al. A single population of olfactory sensory neurons mediates an innate avoidance behaviour in Drosophila. Nature 431, 854–859 (2004)
Ai, M. et al. Acid sensing by the Drosophila olfactory system. Nature 468, 691–695 (2010)
Billeter, J.-C. & Levine, J. D. Who is he and what is he to you? Recognition in Drosophila melanogaster. Curr. Opin. Neurobiol. 23, 17–23 (2013)
Schneider, J., Dickinson, M. H. & Levine, J. D. Social structures depend on innate determinants and chemosensory processing in Drosophila. Proc. Natl Acad. Sci. USA 109, 17174–17179 (2012)
Schaefer, P. L., Varuni Kondagunta, G. & Ritzmann, R. E. Motion analysis of escape movements evoked by tactile stimulation in the cockroach Periplaneta americana. J. Exp. Biol. 190, 287–294 (1994)
Stocker, R. F. Taste perception: Drosophila – a model of good taste. Curr. Biol. 14, R560–R561 (2004)
Billeter, J.-C., Atallah, J., Krupp, J. J., Millar, J. G. & Levine, J. D. Specialized cells tag sexual and species identity in Drosophila melanogaster. Nature 461, 987–991 (2009)
Höltje, M. Rapid mechano-sensory pathways code leg impact and elicit very rapid reflexes in insects. J. Exp. Biol. 206, 2715–2724 (2003)
Kamikouchi, A., Wiek, R., Effertz, T., Göpfert, M. C. & Fiala, A. Transcuticular optical imaging of stimulus-evoked neural activities in the Drosophila peripheral nervous system. Nature Protocols 5, 1229–1235 (2010)
Hirsch, J. & Erlenmeyer-Kimling, L. Sign of taxis as a property of the genotype. Science 134, 835–836 (1961)
Manoli, D. S., Fan, P., Fraser, E. J. & Shah, N. M. Neural control of sexually dimorphic behaviors. Curr. Opin. Neurobiol. 23, 330–338 (2013)
Ramdya, P., Schaffter, T., Floreano, D. & Benton, R. Fluorescence behavioral imaging (FBI) tracks identity in heterogeneous groups of Drosophila. PLoS ONE 7, e48381 (2012)
Kim, J. et al. A TRPV family ion channel required for hearing in Drosophila. Nature 424, 81–84 (2003)
Kim, S. E., Coste, B., Chadha, A., Cook, B. & Patapoutian, A. The role of Drosophila Piezo in mechanical nociception. Nature 483, 209–212 (2012)
Brand, A. H. & Perrimon, N. Targeted gene expression as a means of altering cell fates and generating dominant phenotypes. Development 118, 401–415 (1993)
Jenett, A. et al. A GAL4-driver line resource for Drosophila neurobiology. Cell Rep. 2, 1–11 (2012)
Ling, F., Dahanukar, A., Weiss, L. A., Kwon, J. Y. & Carlson, J. R. The molecular and cellular basis of taste coding in the legs of Drosophila. J. Neurosci. 34, 7148–7164 (2014)
Berndt, A. et al. High-efficiency channelrhodopsins for fast neuronal stimulation at low light levels. Proc. Natl Acad. Sci. USA 108, 7595–7600 (2011)
Silbering, A. F. et al. Complementary function and integrated wiring of the evolutionarily distinct Drosophila olfactory subsystems. J. Neurosci. 31, 13357–13375 (2011)
Bischof, J., Maeda, R. K., Hediger, M., Karch, F. & Basler, K. An optimized transgenesis system for Drosophila using germ-line-specific C31 integrases. Proc. Natl Acad. Sci. USA 104, 3312–3317 (2007)
Han, C., Jan, L. Y. & Jan, Y. N. Enhancer-driven membrane markers for analysis of nonautonomous mechanisms reveal neuron–glia interactions in Drosophila. Proc. Natl Acad. Sci. USA 108, 9673–9678 (2011)
Billeter, J.-C., Atallah, J., Krupp, J. J., Millar, J. G. & Levine, J. D. Specialized cells tag sexual and species identity in Drosophila melanogaster. Nature 461, 987–991 (2009)
Branson, K., Robie, A. A., Bender, J., Perona, P. & Dickinson, M. H. High-throughput ethomics in large groups of Drosophila. Nature Methods 6, 451–457 (2009)
Luke, S. The ECJ Owner’s Manual. San Francisco, California, A user manual for the ECJ Evolutionary Computation Library (Evolutionary Computation Library, 2010)
Acknowledgements
We thank L. Sprecher, J. Weber, A. Gaille, A. Canapini and I. Barbier for help in aggregation density measurements, A. Silbering for generating anosmic Drosophila lines, F. Schütz for advice on statistics, J. Yi for image analysis software, J. Levine, A. Patapoutian, M. Landgraf, M. Göpfert and the Bloomington Drosophila Stock Center for Drosophila strains, T. Oertner for plasmids, and the Developmental Studies Hybridoma Bank for antibodies. We thank D. Cullen, L. Keller, J. Levine, M. Louis, S. Manley, S. Martin, J. Schneider and members of the Benton and Floreano laboratories for discussions. P.R. was supported by a Human Frontier Science Program Long-term Fellowship. P.L. was supported by the Swiss National Science Foundation (200021_127143). D.F. acknowledges support from the Swiss National Science Foundation (CR32I3_141063/1) and the FP7-FET European Project INSIGHT (308943). R.B. acknowledges support from European Research Council Starting Independent Researcher and Consolidator Grants (205202 and 615094).
Author information
Authors and Affiliations
Contributions
P.R., R.B. and D.F. conceived, designed and supervised the project. P.R., S.C., P.L. and L.F. performed experiments. P.R., P.L., L.F. and W.T. analysed data. P.R. and R.B. wrote the paper with assistance from P.L. and D.F.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Extended data figures and tables
Extended Data Figure 1 Drosophila aggregate and move coherently at high densities.
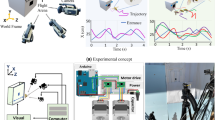
a, Images at the start (left) and end (right) of a ∼3 h video recording with 100 flies (50 male and 50 female) moving within a large container containing a banana paste dish (left) and an agarose dish (right). b, Fly densities on the banana paste dish for each gender or mixture of genders averaged from the 30th through 60th minute of a 90 min experiment (n = 4 experiments for each genotype). c, The arena for simultaneous odour stimulation and behaviour tracking of Drosophila groups. d, Laminar flow and odour localization validation using simulated fluid dynamics. High velocity vectors (yellow/red) are present at the odour entry and exit ports while lower, uniform velocity vectors (green/blue) are located within the arena. e, A histogram showing the per cent of time avoiding the odour for all flies in all experiments and for each density (colour-coded). Data are from Fig. 1d. f, The per cent time avoiding the odour (mean and s.d.) for five different densities of the subset of flies starting in the odour zone that have at some point entered the air zone (n = 37, 38, 36, 35, and 38 experiments for 0.06, 0.38, 0.75, 1.13, and 1.5 flies per cm2 respectively). In contrast to Fig. 1d, the lack of density dependence suggests that flies that leave the odour zone tend not to return. g, The formula for a Coherent Motion Index that captures the degree of motion in the same direction (top) and an example of coherent motion away from the odour zone by 9 out of 11 flies total (bottom, cyan). h, The Coherent Motion Index for flies in the air (white boxes) or odour (grey boxes) zones during the ten seconds following odour onset. Data are from Fig. 1d. Shown are the results across all tested densities (0.06–1.5 flies per cm2) for flies that began the experiment in the odour (grey boxes) or the air zone (white boxes). n = 31–38 experiments. A single asterisk (*) denotes P < 0.05 and a double asterisk (**) denotes P < 0.01 for a Bonferroni sign test comparing medians to 0.
Extended Data Figure 2 Model parameter determination and the sensitivity of simulated collective behaviour to parameter variation.
a, b, Individual freely walking flies were presented with 5% CO2 (‘odour’) or air across the entire arena for 1 min. Mean (solid line) and s.e.m. (translucent shading) walking velocity magnitude (a) and forward bout probability (b) before, during, and after an odour impulse (black, n = 45 flies) or an air impulse control (blue, n = 43 flies). Bouts began when velocity exceeded a high threshold of 1 mm s−1. Bouts ended when velocity dipped below a low threshold of 0.5 mm s−1. Short bouts or pauses (<2 frames or 100 ms) were removed by merging the fly’s current behavioural state with neighbouring measurements. Grey indicates the period of odour presentation. c, Probability for Drosophila to turn back when crossing the interface from odour to air and vice versa after a given period of time. Data are from Fig. 1d (density = 0.06). d, Scatter plots of Drosophila bout lengths during isolation versus Encounter Response bout lengths (red dots) and the double-linear function fitting the data (blue line). n = 16 experiments at density = 0.38 flies per cm2. The graph on the right is a zoom-in of that on the left (dashed box). e–h, Sensitivity of simulated collective behaviour to P(boutair) ranging from Probability = 0 (blue, never initiating spontaneous walking in air) to Probability = 1 (yellow, always initiating spontaneous walking in air) (e), P(boutodour) ranging from Probability = 0 (blue, never initiating spontaneous walking in odour) to Probability = 1 (yellow, always initiating spontaneous walking in odour) (f), P(turn around from air) ranging from Probability = 0 (never turning around from the air zone, blue) to Probability = 1 (always turning around from the air zone, yellow) (g), P(turn away from odour) ranging from Probability = 0 (never turning around from the odour zone, blue) to Probability = 1 (always turning around from the odour zone, yellow) (h). In all panels, each coloured line indicates the mean per cent time avoiding the odour across densities, the black line indicates the simulation result for parameter values taken from real fly data, n = 10,902 for all data-points, and superimposed are the mean values for real flies (black circles).
Extended Data Figure 3 Encounter Response kinematics for inter-fly or metallic disc touches.
a, Schematic of octant colour-coding. Each Encounter Response trajectory is assigned to the perimeter octant bisected by a line drawn to the nearest neighbouring fly during an Encounter. A head octant (red) is included here but these responses likely represent front leg touches. b, The mean (solid lines) and standard error (translucent areas) for Encounter Response trajectories (right) colour-coded by the relative location of the neighbouring fly as in panel a. The scale bar is 1 mm. c, Boxplot of mean forward (top), sideways (middle), and angular (bottom) velocities for the first 0.5 s of Encounter Responses (n = 112–244 Encounters with duration >0.5 s) in the olfactory avoidance experiment from Fig. 1d (density = 0.75 flies per cm2). Velocities are colour-coded by octant. d, Schematic of touch-point colour-coding for high-resolution inter-fly touch response experiments. Each walking trajectory is colour-coded by the appendage touched by a neighbouring fly. Data are from Fig. 3c. e, Boxplot of mean forward (top), sideways (middle), and angular (bottom) velocities for the first 0.16 s of touch responses. Velocities are colour-coded by touch-point. f, Schematic of touch-point colour-coding for mechanical touch response experiments. Each touch response trajectory is assigned to the appendage touched by a metallic disc. Data are from Fig. 3d. g, Boxplot of mean forward (top), sideways (middle), and angular (bottom) velocities for the first 0.5 s of touch responses. Velocities are colour-coded by touch-point.
Extended Data Figure 4 A behavioural screen for neurons mediating Encounter Responses and their leg expression patterns.
a, Frequency of Encounter Responses for each Gal4 driver expressing UAS-Tnt. Driver lines are sorted by median frequency of Encounter Responses. A single asterisk (*) indicates P < 0.05 for a Bonferroni-corrected Mann–Whitney U-test comparing a given line against a gustatory neuron expression line, R27B07-Gal4 (green). Density = 1.13 flies per cm2 and n = 10 experiments for each line. The selected line, R55B01-Gal4, drives expression in distal leg mechanosensory neurons (cyan). b, The fraction of flies in each experiment exhibiting walking velocities that meet the criteria for Encounter Responses (mean velocity magnitude greater than 5 mm s−1 for more than 0.5 s) at any time during the experiment. Lines are sorted and colour-coded as in panel a. c, The identity and leg expression patterns of Gal4 drivers tested in the screen. Black boxes denote the presence of a given cell class. A cyan outline indicates distal leg mechanosensory neuron expression. A red outline indicates thoracic ganglion expression in lines with significant reductions in Encounter Response frequency. The expression pattern is also shown for piezo-Gal4, which was used in subsequent experiments to refine identification of the leg mechanosensory neuron class required for Encounter Responses. d, Tarsal segments for w;UAS-CD4:tdGFP;R55B01-Gal4 (left) and w;UAS-CD4:tdGFP;piezo-Gal4 (right) flies. Each tarsal segment is labelled from proximal to distal (T1-T5). Endogenous GFP fluorescence (green) is superimposed upon a transmitted light image (magenta). The scale bars are 30 μm. Below is a high-resolution image of a mechanosensory sensilla neuron on the tarsus of a w;UAS-CD4:tdGFP;R55B01-Gal4 fly. Endogenous GFP fluorescence (green) is superimposed on cuticular autofluorescence (magenta). The axon, cell body, and dendrite of this neuron are labelled. The scale bar is 10 μm.
Extended Data Figure 5 Leg mechanosensory sensilla neurons, but not chordotonal organs, are necessary and sufficient for Encounter Responses.
We identified five lines expressing Gal4 in different subsets of mechanosensory neurons (R55B01-Gal4, piezo-Gal4, piezo-Gal4;cha3-Gal80, R86D09-Gal4, and R46H11-Gal4) and one line expressing Gal4 in the fan-shaped body (R65C03-Gal4) as a control for fan-shaped body expression in R55B01-Gal4. a, Brain and thoracic ganglion expression for Gal4 lines driving UAS-CD4:tdGFP. Immunostaining is shown for the neuropil marker nc82 (magenta) and CD4:tdGFP (green). Sensory neuron projections from the wings (‘W’) and legs (R1–R3 and L1–L3) are labelled for R55B01-Gal4. Importantly, neurons expressing GFP in the brains of R55B01-Gal4 and piezo-Gal4; cha3-Gal80 flies are different, implying that they are not responsible for the production of Encounter Responses. The scale bars are 40 μm. b, Transmitted light images, inverted GFP fluorescence images (GFP indicated in black), and summed fluorescence of Gal4 driver legs expressing CD4:tdGFP. Autofluorescent cuticle and pretarsus debris are indicated in black. GFP expression is shown in green. When present, the femoral chordotonal organ (‘fChO’), tibial chordotonal organ (‘tChO’) and mechanosensory sensilla neurons (‘MS’) are labelled. The scale bar is 100 μm. c, The frequency of Encounter Responses for a parental control (‘Gal4’), Gal4 line neurons expressing an inactive tetanus toxin control (‘Gal4’ and ‘Inactive Tnt’), or Gal4 line neurons expressing tetanus toxin (‘Gal4’ and ‘Tnt’). n = 10–15 experiments for each condition. d, Blue laser pulse stimulation responses of Gal4 line flies expressing UAS-ChR2 in the absence (left) or presence (right) of the essential cofactor all trans-Retinal (n = 6–12 flies for each condition). Each box indicates the response for a single fly (‘walk’, ‘groom’, ‘leg shift’, ‘none’, or ‘jump’).
Extended Data Figure 6 Schematic of collective odour avoidance in Drosophila.
a, A group of flies experiences odour flow on the right half of the arena. The direction of odour or air flow is indicated by red and black arrows, respectively. Odour increases the probability of spontaneous walking (black fly). b, Walking increases the probability of encountering a stationary fly, producing an Encounter Response. c, Walking flies cause additional Encounters and a cascade of Encounter Responses in the odour zone. d, Walking flies pass into the non-odour zone through interactions with the arena walls and possibly by sensing the direction of odour flow. e, The influx of walking flies to the air zone results in additional Encounter Responses. f, The propensity to turn around at the air–odour interface (perhaps compounded by the effects of unknown aggregation pheromones) causes flies to remain in the air zone, resulting in odour avoidance.
Extended Data Figure 7 Collective negative gravitaxis in Drosophila.
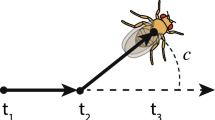
a, A schematic of the negative gravitaxis experiment. Flies are placed at the lowest point of a behavioural arena tilted at 22.5°. The flies’ positions are normalized to the long-axis of the arena ranging from 0 (arena bottom, lowest elevation) to 100 (arena top, highest elevation). b, Image of flies (black triangles) and their trajectories during 1 s (black dotted lines) in the negative gravitaxis experiment. Shown are representative images of an experiment with one fly (density = 0.06 flies per cm2) and an experiment with 18 flies (density = 1.13 flies per cm2). Negative Gravitaxis Index value positions of 0 (lowest elevation in the arena) and 100 (highest elevation in the arena) are shown (white-dashed lines). c, To obtain a Negative Gravitaxis Index for a given fly, its position was averaged during the second minute of the experiment. Shown are the mean and s.d. of Negative Gravitaxis Indices for wild-type animals at densities of either 0.06 or 1.13 flies per cm2 (n = 28 and 30 experiments, respectively). d, Images of two flies (left, black triangles in black dashed box) undergoing an Encounter (middle, red dashed box) that results in an Encounter Response (right, blue dashed box) during a negative gravitaxis experiment.
Supplementary information
Drosophila aggregate to high densities
A video taken at 4 frames per minute demonstrating the aggregation of Drosophila onto a banana paste dish (left) over 166 minutes. (MOV 2904 kb)
Encounters occurring during odour avoidance
A video taken at 20 frames per second (fps) showing an olfactory avoidance experiment at a density of 1.13 flies/cm2. Flies with a neighbour within 25% of long-axis body length (Encounter) are circled in red and those more distant from their neighbours are circled in white. An odour is presented on the right half of the arena at the start of the video, resulting in a cascade of Encounters and collective odour avoidance. (MOV 2669 kb)
Flies interacting through appendage contact
A video taken at 125 fps showing inter-fly contact of the front right legs eliciting stereotyped walking in a previously stationary fly. (MOV 1905 kb)
Mechanical touch elicits behavioural responses
A video taken at 20 fps showing mechanical stimulation by a metallic disc of the right foreleg of a stationary fly, which elicits stereotyped walking. (MOV 296 kb)
Optogenetic stimulation in the absence of all trans-Retinal does not elicit walking in flies expressing ChR2 in distal leg mechanosensory sensilla neurons and chordotonal organs
A video taken at 20 fps showing the effect of thoracic blue laser light stimulation on a fly expressing ChR2 in leg mechanosensory sensilla neurons and chordotonal organs (w;UAS-ChR2;R55B01-Gal4) but raised in the absence of all trans-Retinal. The laser light position is determined using a far-red laser light. Subsequently, a 1 s pulse of blue laser light is presented. In this video the light is presented three times for illustrative purposes. (MOV 921 kb)
Optogenetic stimulation in the presence of all trans-Retinal elicits walking in flies expressing ChR2 in distal leg mechanosensory sensilla neurons and chordotonal organs
A video taken at 20 fps showing the effect of thoracic blue laser light stimulation on a fly expressing ChR2 in leg mechanosensory sensilla neurons and chordotonal organs (w;UAS-ChR2;R55B01-Gal4) and raised in the presence of all trans-Retinal. The laser light position is determined using a far-red laser light. Subsequently, a 1 s pulse of blue laser light is presented. (MOV 501 kb)
Rights and permissions
About this article

Cite this article
Ramdya, P., Lichocki, P., Cruchet, S. et al. Mechanosensory interactions drive collective behaviour in Drosophila. Nature 519, 233–236 (2015). https://doi.org/10.1038/nature14024
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/nature14024
This article is cited by
-
Aggregation pheromones have a non-linear effect on oviposition behavior in Drosophila melanogaster
Nature Communications (2023)
-
Selection on heritable social network positions is context-dependent in Drosophila melanogaster
Nature Communications (2021)
-
Chronically lonely flies overeat and lose sleep
Nature (2021)
-
Olfactory processing in the lateral horn of Drosophila
Cell and Tissue Research (2021)
-
Behavioral and neuronal underpinnings of safety in numbers in fruit flies
Nature Communications (2020)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
