
Abstract
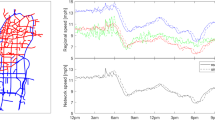
Advances in multiagent simulation techniques1,2,3 have made possible the study of realistic highway traffic patterns and have allowed theories3,4,5,6 based on driver behaviour to be tested. Such simulations display various empirical features of traffic flows7, and are used to design traffic controls that maximize the throughput of vehicles on busy highways. In addition to its intrinsic economic value8, vehicular traffic is of interest because it may be relevant to social phenomena in which diverse individuals compete with each other under certain constraints9,10. Here we report simulations of heterogeneous traffic which demonstrate that cooperative, coherent states can arise from competitive interactions between vehicles. As the density of vehicles increases, their interactions cause a transition into a highly correlated state in which all vehicles move with approximately the same speed, analogous to the motion of a solid block. This state is safer because it has a reduced lane-changing rate, and the traffic flow is high and stable. The coherent state disappears when the vehicle density exceeds a critical value. We observe the effect also in real Dutch traffic data.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout




Similar content being viewed by others


References
Schreckenberg, M., Schadschneider, A., Nagel, K. & Ito, N. Discrete stochastic models for traffic flow. Phys. Rev. E 51, 2939–2949 (1995).
Faieta, B. & Huberman, B. A. Firefly: A Synchronization Strategy for Urban Traffic Control(Internal Rep. No. SSL-42, Xerox PARC, Palo Alto, CA, 1993).
Schreckenberg, M. & Wolf, D. E. Traffic and Granular Flow '97(Springer, Singapore, 1998).
Prigogine, I. & Herman, R. Kinetic Theory of Vehicular Traffic(Elsevier, New York, 1971).
Leutzbach, W. Introduction to the Theory of Traffic Flow(Springer, Berlin, 1988).
Helbing, D. Verkehrsdynamik(Springer, Berlin, 1997).
May, A. D. Traffic Flow Fundamentals(Prentice Hall, Englewood Cliffs, NJ, 1990).
Small, K. A. Urban Transportation Economics(Harwood Academic, London, 1992).
Glance, N. S. & Huberman, B. A. The dynamics of social dilemmas. Sci. Am. 270, 76–81 (1994).
Helbing, D. Quantitative Sociodynamics(Kluwer Academic, Dordrecht, 1995).
Daganzo, C. F. Probabilistic structure of two-lane road traffic. Transportation Res. 9, 339–346 (1975).
Hall, F. L. & Lam, T. N. The characteristics of congested flow on a freeway across lanes, space, and time. Transportation Res. A 22, 45–56 (1988).
Rickert, M., Nagel, K., Schreckenberg, M. & Latour, A. Two lane traffic simulations using cellular automata. Physica A 231, 534–550 (1996).
Nagel, K., Wolf, D. E., Wagner, P. & Simon, P. Two-lane traffic rules for cellular automata: A systematic approach. Phys. Rev. E 58, 1425–1437 (1998).
Kerner, B. S. & Rehborn, H. Experimental features and characteristics of traffic jams. Phys. Rev. E 53, R1297–R1300 (1996).
Kerner, B. S. & Rehborn, H. Experimental properties of phase transitions in traffic flow. Phys. Rev. Lett. 79, 4030–4033 (1997).
Helbing, D. & Treiber, M. Gas-kinetic-based traffic model explaining observed hysteretic phase transition. Phys. Rev. Lett. 81, 3042–3045 (1998).
Axelrod, R. & Dion, D. The further evolution of cooperation. Science 242, 1385–1390 (1988).
Gazis, D. C., Herman, R. & Rothery, R. W. Nonlinear follow the leader models of traffic flow. Operations Res. 9, 545–567 (1961).
Bando, M. et al. Phenomenological study of dynamical model of traffic flow. J. Phys. I France 5, 1389–1399 (1995).
Huberman, B. A. & Glance, N. S. Evolutionary games and computer simulations. Proc. Natl Acad. Sci. USA 90, 7716–7718 (1993).
Helbing, D. & Schreckenberg, M. Cellular automata simulating experimental properties of traffic flows. Phys. Rev.(submitted).
Helbing, D., Keltsch, J. & Molnár, P. Modelling the evolution of human trail systems. Nature 388, 47–50 (1997).
Ben-Jacob, E. et al. Generic modelling of cooperative growth patterns in bacterial colonies. Nature 368, 46–49 (1994).
Vicsek, T. et al. Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 75, 1226–1229 (1995).
Lave, C. A. Speeding, coordination, and the 55 MPH limit. Am. Econ. Rev. 75, 1159–1164 (1985).
Krug, J. & Ferrari, P. A. Phase transitions in driven diffusive systems with random rates. J. Phys. A: Math. Gen. 29, L465–L471 (1996).
Acknowledgements
D.H. thanks the DFG for support by a Heisenberg scholarship, and H. Taale and the Dutch Ministry of Transport, Public Works and Water Management for supplying the highway data, which were evaluated by V. Shvetsov.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Helbing, D., Huberman, B. Coherent moving states in highway traffic. Nature 396, 738–740 (1998). https://doi.org/10.1038/25499
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1038/25499
This article is cited by
-
Travel time prediction with viscoelastic traffic model
Applied Mathematics and Mechanics (2018)
-
Multivariate multiscale sample entropy of traffic time series
Nonlinear Dynamics (2016)
-
Experimental Study of Ant Movement in a Straight Passageway under Stress Conditions
Journal of Insect Behavior (2016)
-
Multiscale multifractal detrended cross-correlation analysis of traffic flow
Nonlinear Dynamics (2015)
-
Entangled communities and spatial synchronization lead to criticality in urban traffic
Scientific Reports (2013)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
