
Abstract
The sliding of a solid object on a solid substrate requires a shear force that is larger than the maximum static friction force. It is commonly believed that the maximum static friction force is proportional to the loading force and does not depend on the apparent contact area. The ratio of the maximum static friction force to the loading force is called the static friction coefficient µM, which is considered to be a constant. Here, we conduct experiments demonstrating that the static friction force of a slider on a substrate follows a novel friction law under certain conditions. The magnitude of µM decreases as the loading force increases or as the apparent contact area decreases. This behavior is caused by the slip of local precursors before the onset of bulk sliding and is consistent with recent theory. The results of this study will develop novel methods for static friction control.
Similar content being viewed by others
Introduction
The application of a shear force larger than the maximum static friction force to a slider on a base block causes the slider to start sliding. A kinetic friction force is exerted on the slider in the sliding state. Friction appears in various systems ranging from atomic to geological scales and has been studied since ancient times1,2,3,4,5,6. From an engineering perspective, friction control is critical to the effective functioning of machines and can enable advances in energy and global warming problems4,5,6. In the 15th century, da Vinci discovered that the friction force is proportional to the loading force and does not depend on the apparent contact area between two solid objects. About 200 years later, Amontons rediscovered these results, which are now collectively called Amontons' law. This law is commonly believed to hold well for diverse systems, discussed in high school textbook and used to achieve friction control for various machines. The ratio of the maximum static friction force to the loading force is called the static friction coefficient. When Amontons' law holds, this ratio is a constant that does not depend on the loading force or the apparent contact area.
Friction mechanisms are usually explained as follows1,2,3,4,5,6. The roughness of the solid surfaces in contact with each other results in a very small total area for the real contact points relative to the apparent contact area. The real contact points yield a finite shear strength at the interface, which is produced by interatomic or intermolecular forces. Relative sliding motion between two solids in contact requires the application of a shear force that is larger than the total shear strength, that is, the maximum static friction force must be applied. The total area of the real contact points is called the real contact area. It is considered that the real contact area is proportional to the loading force and does not depend on the apparent contact area and the shear strength per unit of the real contact area is constant. Thus, the friction force is proportional to the loading force, does not depend on the apparent contact area and Amontons' law holds. Note that, to date, alternative schemes have also been put forward to explain the mechanisms of friction and Amontons' law7.
Recently, the contact interface has become an interesting topic in the case of friction for a shear force that is smaller than the macroscopic maximum static friction force Fsmax, which corresponds to the onset of sliding motion for the whole slider8,9,10,11,12. Bulk sliding does not occur under this condition. The instantaneous and local densities of the real contact area have been measured by employing the transmission and reflection of a laser sheet, demonstrating that local precursor slipping occurs at the contact interface between a polymethyl-methacrylate (PMMA) slider and a PMMA base block8,9,10,11,12. A shear force is applied to the slider by a pushing rod or a spring at the trailing edge of the slider. The precursor front begins from the trailing edge of the slider and stops after propagating a certain distance. The front of the next precursor also begins from the trailing edge after a certain interval and stops after a propagation length that is longer than the previous length. Initially, the propagation length gradually increases with the number of precursors; however, after exceeding a critical length, the propagation length begins to grow rapidly. When the precursor front reaches the leading edge of the slider, bulk sliding occurs. This behavior has been observed in various experiments8,9,10,11,12 and the front propagation velocity has been investigated in experiments8,9,10,11 and in numerical and theoretical studies12,13,14,15,16,17,18,19.
Ben-David et al. reported experimentally that the macroscopic static friction coefficient µM = Fsmax/W, where W is the loading force, are strongly dependent on precursor dynamics11. On the other hand, finite element method (FEM) approaches and analytical calculations have been used to show that µM decreases as the pressure and the system length L increase19. These behaviors are determined by the precursor dynamics and the quasi-static precursor transitions into rapid motion at a critical length lc. In the calculations, Amontons' law is assumed to hold locally, i.e., the local frictional stress is proportional to the local pressure. The following relation was obtained,

when lc/L is smaller than unity19. Here, µs and µk are the local static and kinetic friction coefficients, respectively. The dependence of lc on the loading force yields a new friction law:

where a is a constant that does not depend on W. When the magnitude of W and L is such that lc/L is close to 0 or unity, Amontons' law holds approximately. The aforementioned relationships have been obtained from an analytical calculation of the 1D effective model and have been verified by a 2D FEM calculation. However, these results have not yet been verified experimentally.
In this study, we experimentally investigate the precursor dynamics and the macroscopic static friction coefficient of a PMMA slider loaded on a PMMA base block using the transmission of a laser sheet. The macroscopic static friction coefficient is found to decrease as the loading force increases. The experimental results show little dependence on the driving velocity or the height from the contact interface at which the tangential spring force, which we call the shear force, is applied. The results verify relationships (1) and (2) within the experimental accuracy, that is, the breakdown of Amontons' law and the validity of the novel friction law, Eq. (2). It is also indicated that how these relationships are associated with the local precursor slip. The results obtained herein are consistent with previous experimental studies20 including the work by Ben-David et al. noted above11. Moreover, the macroscopic static friction coefficient decreases as the apparent contact area decreases. This result also indicates the breakdown of Amontons' law.
Results
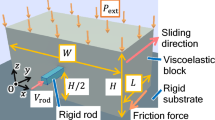
We apply a shear force to the slider by a leaf spring at a height h from the contact surface with a constant driving velocity V, and a uniform normal force Fz. Figure 1a shows the typical time evolution of the shear force for V = 0.4 mm/s, h = 10 mm and Fz = 400 N. After the leaf spring starts moving, the shear force increases linearly from 0 over time t, which means that the shear force balances the static friction force; the slider is at rest in this regime. The shear force drops immediately after it reaches its maximum value at t = 5.8 s. The drop is caused by the sliding motion of the whole slider and is followed by the arrest of the slider. The maximum value of the shear force is the macroscopic static friction force Fsmax. The shear force increases linearly and periodically drops sharply, that is, a periodic stick-slip motion appears. The inset of Fig. 1a displays an enlarged view of Fx near t = 5 s. Prior to the large drop in the shear force corresponding to the onset of bulk sliding, there is a sequence of small drops, which are shown by black arrows. This behavior indicates that the precursors appear as partial slipping when the shear force is smaller than the macroscopic maximum static friction force.

Time evolution of the shear force and the instantaneous and local densities of the real contact area.
(a) The shear force and (b) the instantaneous and local densities of the real contact area are shown for V = 0.4 mm/s, h = 10 mm and Fz = 400 N. The inset of (a) displays an enlarged view of Fx near t = 5 s. The arrows indicate when local precursor slipping occurs, the vertical broken lines show when bulk sliding occurs and the red circles denote where local precursor slipping stops.
The spatio-temporal distribution of the real contact area density in Fig. 1b clearly shows the sequence of discrete precursor slips that start from the trailing edge of the slider. This behavior results from the relatively small pressure at the bottom of the trailing edge caused by the torque induced by the shear force, even though the applied pressure is uniform17,18,19. Each precursor front stops after propagating a certain length, as indicated by the red circles in the figure. The propagation length of the subsequent precursor exceeds that of the preceding precursor. When the precursor front reaches the leading edge of the slider, bulk sliding occurs and the shear force drops dramatically.
Figure 2 shows the propagation length l of the precursors normalized by the slider length L as a function of the ratio of the shear force Fx to the loading force W for various magnitudes of the driving velocity V (Fig. 2a), various heights h at which the shear force is applied (Fig. 2b) and various applied normal forces Fz (Fig. 2c). The loading force W is the sum of the applied normal force Fz at the top plane of the slider and the weight of the slider Mg = 6 N, where M is the mass of the slider and g is the acceleration of gravity. Initially, l increases linearly with small slope with increasing Fx/W; however, l grows rapidly beyond a certain value of Fx/W for every condition. The two solid straight lines show the results of fitting the data in the ranges of small and large values of Fx/W, respectively, for all conditions in (a) and (b). In (c) the two solid straight lines in the same color show the results of the fitting the data in the small and large values of Fx/W, respectively, for every magnitude of Fz. We can define the critical length normalized by the system length lc/L from the intersection of the two solid straight lines. The magnitudes of lc/L are indicated by broken horizontal lines in the figures and correspond to the critical length of the slow increase of the propagation length of the precursor front. The magnitude of lc/L does not depend on the driving velocity or the height h and is approximately 0.45 for Fz = 400 N. When the precursor front reaches the leading edge of the slider, bulk sliding occurs. The value of Fx/W at l/L = 1 corresponds to the macroscopic static friction coefficient µM. Figure 2c shows l/L as a function of Fx/W for various normal forces. The critical length lc appears for any value of the applied normal force, but the magnitude of lc depends on the applied normal force. This result will be discussed in more detail below.

Propagation length l vs. shear force Fx.
The propagation length l of the precursors, normalized by the slider length L, is shown as a function of the shear force Fx, which is normalized by the loading force W, for various magnitudes of (a) the driving velocity V, (b) the height h at which the shear force is applied and (c) the applied normal force Fz. In (a), Fz = 400 N and h = 0 mm; in (b), Fz = 400 N and V = 0.4 mm/s; and in (c), V = 0.4 mm/s and h = 0 mm. The two solid straight lines show the results of fitting the data in the ranges of small and large values of Fx/W, respectively, for all conditions in (a) and (b) because the behaviors do not depend on V and h. In (c) the two solid straight lines in the same color show the results of the fitting the data in the small and large values of Fx/W, respectively, for every magnitude of Fz because the behaviors depends on Fz. The broken lines show the critical length lc normalized by L determined by the intersection of the two solid straight lines.
We also measured the magnitude of the macroscopic static friction coefficient µM, which corresponds to the onset of bulk sliding of the slider, under various conditions. Figure 3 shows the dependence of µM on the loading force for various values of the driving velocity V (Fig. 3a) and height h (Fig. 3b). Each point in the figure represents the average value of 3 to 9 (typically 9) measurements. Amontons' law states that μM does not depend on the loading force. However, Fig. 3 shows that μM decreases as the loading force increases for all values of V and h. This behavior indicates the breakdown of Amontons' law and is consistent with the results obtained from the FEM and analytical calculations19. The driving velocity V and height h have little effect on the magnitude of μM. Note that the apparent contact area between the slider and the base block changes negligibly over the range of loading forces used in the experiment.

Macroscopic static friction coefficient µM vs. loading force W.
The dependence of the macroscopic static friction coefficient μM on the loading force W is shown for various values of (a) the driving velocity V and (b) the height h. The error bars indicate the standard deviation. In (a), h = 0 mm and in (b), V = 0.4 mm/s. The broken lines show the results obtained by fitting the data with Eq. (3) for V = 0.4 mm/s and h = 0 mm.
The dependence of µM on the loading force is well-fitted by the following formula:

Here, a, b and n are fitting parameters. The broken lines in Fig. 3 show the fitting results for V = 0.4 mm/s and h = 0 mm. The parameter values obtained by employing the weighted least squares method are a = 0.53 ± 0.15, b = 0.32 ± 0.24 and n = −0.16 ± 0.15, which exhibit little dependence on the experimental conditions. The magnitude of the errors corresponds to the standard deviation. Reference 19 reports n = −1/3, as noted in Eq. (2), obtained from an analytical method based on the 1D effective model. The result is verified by a 2D FEM calculation. The aforementioned experimentally obtained value of n is quantitatively consistent with the theoretical result within the experimental accuracy. Thus, the novel friction law given by Eq. (2) is experimentally verified.
Reference 19 also predicts a relationship between μM and lc, Eq. (1). Figure 4 shows the experimental results for μM as a function of lc/L. The figure shows that μM is determined by lc/L, which means that the dependence of μM on the loading force is caused by the precursor slip. In fact, lc/L decreases with increasing the loading force as shown by the inset of Fig. 4, which causes the decrease of μM with increasing the loading force. The linear relation between μM and lc shown in the figure is consistent with the theoretical prediction, Eq. (1)19. We used the least squares method to fit the following formula to the experimental data:

Here, α and β are fitting parameters. The broken line in Fig. 4 shows the fitting results for the parameters, α = 0.89 ± 0.15 and β = 0.092 ± 0.077. Equation (4) fits the experimental data fairly well. In ref. 19, both b in Eq. (3) and β in Eq. (4) correspond to the local kinetic friction coefficient μk. Therefore, we can estimate the value of μk by employing two independent methods. The two estimated values are equal to each other within the experimental accuracy. Thus, the theoretical predictions have been verified. The value of α is predicted to correspond to µs–µk, as shown in Eq. (2)19. The values of μs and μk obtained from fitting Eq. (4) to the experimental data are µs = 0.98 ± 0.17 and µk = 0.092 ± 0.077, which are consistent with a previous experimental study11.

Macroscopic static friction coefficient µM vs. critical precursor length lc.
The dependence of the macroscopic static friction coefficient µM is shown for the critical propagation length of the precursor lc, which is normalized by the slider length L. The broken line shows the fitting curve obtained by Eq. (4). The inset shows the dependence of lc/L on the loading force W. The experimental parameters are V = 0.4 mm/s and h = 0 mm.
Amontons' law also states that the friction coefficient does not depend on the apparent contact area. We investigate the dependence of the apparent contact area of the macroscopic static friction coefficient. Figure 5 shows the µM values plotted as a function of various lengths of the sliding surface L', i.e., for various magnitudes of the apparent contact area. To perform this experiment, two regions of the lower portion of the slider are removed. The shape of the slider is shown in the Supplemental Methods. The figure clearly shows that the macroscopic static friction coefficient depends on the apparent contact area. This result also indicates the breakdown of Amontons' law.

Macroscopic static friction coefficient µM vs. sliding surface length L'.
The dependence of the macroscopic static friction coefficient μM is shown for the length of the sliding surface L', i.e., the apparent contact area. The length of the upper surface of the slider is held constant at L = 100 mm. The error bars indicate the standard deviation. The experimental parameters are V = 0.4 mm/s and h = 0 mm.
Discussion
In this study, we investigate the frictional behavior of a solid slider on a solid base block. We observe precursor slipping before the onset of bulk sliding; each of these slips causes a small drop in the shear force applied to the slider. The front of the precursor slip starts from the trailing edge of the slider and stops after propagating a length l. After a certain interval, the next precursor starts to slip from the trailing edge and stops after a propagation length l, which is longer than the propagation length of the previous precursor. Initially, the magnitude of the propagation length l increases gradually; however, after exceeding a critical length lc, the propagation length increases rapidly. The magnitude of lc depends on the loading force W. We also find that the macroscopic static friction coefficient μM decreases as W increases. The decrease of μM with increasing W is consistent with the data of the recent work by Ben-David et al11, although they did not discuss this behavior. This behavior indicates the breakdown of Amontons' law and is consistent with 2D FEM and analytical calculations19. Reference 19 predicts a novel friction law, Eq. (2), which implies that the macroscopic static friction coefficient is the sum of a term that is proportional to W–1/3 and the local kinetic friction coefficient μk. The –1/3 power of the W dependence of µM is consistent with the present experimental results within the experimental accuracy. Hence, the novel friction law, Eq. (2), is experimentally verified.
The linear relation between μM and lc is also consistent with the theoretical prediction19 and indicates that the dependence of μM on the loading force is caused by the precursor slip. Two independent methods yield the same estimate of the local kinetic friction coefficient μk within the experimental accuracy and support the theoretical prediction. The magnitude of µM depends on the apparent contact area, which also indicates the breakdown of Amontons' law.
In the 2D FEM and 1D theoretical calculations19, the quasi-static precursor slip appears and grows continuously from the trailing edge of the slider. When the front of the quasi-static precursor reaches a critical length lc, the quasi-static precursor becomes unstable and changes to a leading rapid precursor, which starts to move at a high velocity toward the leading edge of the slider. When the front of the precursor reaches the leading edge, bulk sliding occurs. In ref. 19, Amontons' law is assumed to hold locally and the local friction coefficient is considered to be a function of the instantaneous local velocity only. When the local velocity becomes finite, the magnitude of the local friction coefficient decreases linearly with the local slip velocity from the value of the local static friction coefficient µs. Above a certain velocity, the local friction coefficient takes a constant value that is equal to the local kinetic friction coefficient μk. After the high-velocity bulk sliding occurs, the magnitude of the ratio of the local shear stress to the local pressure is maintained at the value corresponding to the high-velocity bulk sliding due to the finite relaxation time caused by the viscosity; this ratio coincides with μk. However, the magnitude of the ratio of the local shear stress to the local pressure coincides with μs in the region through which the quasi-static precursor has passed because the slip velocity and the slip distance of the precursor are sufficiently small. The value of μM is given by the distribution of the shear stress that occurs when the front of the quasi-static precursor reaches the critical value lc. Thus, μM is determined by lc and the linear relation between these two variables, Eq. (1), holds. The dependence of lc on the loading force W yields the dependence of μM on W. The magnitude of lc is determined by competition between the stabilization and destabilization of the quasi-static precursor. The stabilization is caused by the viscosity and the destabilization is caused by the local frictional stress, which reduces with the velocity. The destabilization effect increases with W. A dimensional analysis on the primary terms of the time evolution of the fluctuation around the quasi-static precursor solution shows that lc/L is proportional to W–1/3. Thus, the expression for μM contains a term that is proportional to W–1/3. When the magnitude of W and L is such that lc/L is close to 0 or unity, Amontons' law holds approximately.
The effect of the precursor dynamics on μM and the dependence of μM on the size of the slider and loading conditions have been discussed in ref. 21. The model employed in that work, however, does not take into account the effect of torque induced by the shear force and then the non-uniformity of the pressure at the bottom of the slider, which causes the transition of the precursor slip at lc in ref. 19 and in the present work as discussed previously. The mechanism of the change of static friction coefficient in ref. 21 is considered to be different from that in ref. 19 and in the present work.
In experiments, including the present study9,10,11,12, however, individual precursor events are observed to occur discretely, while a quasi-static precursor has not been observed. These results may be attributed to the finite resolution of the experiments and the small slip distance of the quasi-static precursor. These factors could prevent the observation of a quasi-static precursor in the experiments. Thus, a precursor with a propagation length below the critical length observed in the experiments would correspond to a bounded rapid precursor, which has been observed in 2D FEM and 1D theoretical calculations and has a finite propagation velocity, but stops beyond a certain length19. The transition of the bounded rapid precursor to the leading rapid precursor occurs near lc. Other possible mechanisms for the disappearance of the quasi-static precursor in experiments are the discrete nature of each real contact point or the slight deviation of the local friction law assumed in the calculations19 from the actual local friction law. As previously mentioned, the local frictional stress is determined by the local pressure and the instantaneous slip velocity in ref. 19. In the actual system, the friction force exhibits hysteresis22,23. These effects could transform the quasi-static continuous precursor into a discrete precursor. As previously mentioned, the dependence of lc on the loading force W results from the dimensional analysis and the same W dependence of lc is expected to hold even in the case of the disappearance of the quasi-static precursor.
In the experiments9,10,11,12, a precursor with a propagation length that is larger than the critical length can stop in the slider. This behavior has not been predicted in the FEM calculations19. However, FEM calculations were performed over a limited range of slider lengths and calculations for longer sliders may show behavior similar to that observed in the experiments. After a precursor with a propagation length exceeding the critical length lc stops, it should leave an imprint of the transition at lc. The experimentally observed linear relationship between the macroscopic static friction coefficient and the critical length lc indicates that the imprint corresponds to the stress distribution when the propagation length of the precursor reaches lc, which is maintained after the subsequent precursor has passed. Thus, the agreement between the experimental results obtained here and the calculation still holds.
In conclusion, we have shown that the macroscopic static friction coefficient of solid objects decreases as the loading force increases and as the apparent contact area decreases. These results indicate the breakdown of Amontons' law and the validity of a novel friction law, Eq. (2). This behavior is caused by precursor slipping occurring prior to bulk sliding. The observed results are consistent with the predictions of 2D FEM and 1D analytical calculations19. The results obtained in this study can lead to new methods for controlling the maximum static friction force.
Methods
The transmission of a laser sheet is used to measure the instantaneous and local densities of the real contact area between a slider and a base block, which are both composed of PMMA. The linear contact area between the slider and the base block is 100 mm long and 0.8 mm wide. A normal force Fz is applied uniformly at the top surface of the slider. The apparatus and experimental methods applied herein are similar to those used in ref. 12, except for the driving method. The slider is pushed by a leaf spring via a stainless L-shaped arm at a height h from the contact surface. The leaf spring, with a spring constant k = 95 kN/m, is moved with a constant driving velocity V ranging from 0.1 to 1.0 mm/s. Details of the experimental apparatus and methods are given in the Supplemental Methods.
References
Bowden, F. P. & Tabor, D. The Friction and Lubrication of Solids (Oxford University Press, New York, 1950).
Persson, B. N. J. Sliding Friction –Physical Principles and Applications–, 2nd ed (Springer, Berlin, 2000).
Popov, V. L. Contact Mechanics and Friction –Physical Principles and Applications– (Springer, Berlin, 2010).
Rabinowicz, E. Friction and Wear of Materials, 2nd ed (John Wiley & Sons, New York, 1995).
Dowson, D. History of Tribology, 2nd ed ((John Wiley & Sons, New York, 1998).
Bhushan, B. Principles and Applications of Tribology, 2nd ed (John Wiley & Sons, New York, 2013).
Müser, M. H., Wenning, L. & Robbins, M. O. Simple macroscopic theory of Amontons' laws for static friction. Phys. Rev. Lett. 86, 1295–1298 (2001).
Rubinstein, S. M., Cohen, G. & Fineberg, J. Detachment fronts and the onset of dynamic friction. Nature 430, 1005–1009 (2004).
Rubinstein, S. M., Cohen, G. & Fineberg, J. Dynamics of precursors to frictional sliding. Phys. Rev. Lett. 98, 226103 (2007).
Ben-David, O., Cohen, G. & Fineberg, J. The Dynamics of the Onset of Frictional Slip. Science 330, 211–214 (2010).
Ben-David, O. & Fineberg, J. Static Friction Coefficient Is Not a Material Constant. Phys. Rev. Lett. 106, 254301 (2011).
Maegawa, S., Suzuki, A. & Nakano, K. Precursors of Global Slip in a Longitudinal Line Contact Under Non-Uniform Normal Loading. Tribol. Lett. 38, 313–323 (2010).
Braun, O. M., Barel, I. & Urbakh, M. Dynamics of Transition from Static to Kinetic Friction. Phys. Rev. Lett. 103, 194301 (2009).
Bouchbinder, E., Brener, E. A., Barel, I. & Urbakh, M. Slow Cracklike Dynamics at the Onset of Frictional Sliding. Phys. Rev. Lett. 107, 235501 (2011).
Kammer, D. S., Yastrebov, V. A., Spijker, P. & Molinari, J.-F. On the Propagation of Slip Fronts at Frictional Interfaces. Tribol. Lett. 48, 27–32 (2012).
Bar-Sinai, Y., Spatschek, R., Brener, E. A. & Bouchbinder, E. Instabilities at frictional interfaces: Creep patches, nucleation and rupture fronts. Phys. Rev. E. 88, 060403 (2013).
Scheibert, J. & Dysthe, D. K. Role of friction-induced torque in stick-slip motion. Europhys. Lett. 92, 54001 (2010).
Amundsen, D. S., Scheibert, J., Thøgersen, K., Trømborg, J. & Malthe-Sørenssen, A. 1D Model of Precursors to Frictional Stick-Slip Motion Allowing for Robust Comparison with Experiments. Tribol. Lett. 45, 357–369 (2012).
Otsuki, M. & Matsukawa, H. Systematic Breakdown of Amontons' Law of Friction for an Elastic Object Locally Obeying Amontons' Law. Sci. Rep. 3, 1586 (2013).
Bouissou, S., Petit, J. P. & Barquins, M. Normal load, slip rate and roughness influence on the polymethylmethacrylate dynamics of sliding 1. Stable sliding to stick-slip transition. Wear 214, 156–164 (1998).
Capozza, R. & Urbakh, M. Static friction and the dynamics of interfacial rupture. Phys. Rev. B 86, 085430 (2012).
Dieterich, J. H. & Kilgone, B. D. Direct Observation of Frictional Contacts: New Insights for State-dependent Properties. PAGEOPH 143, 283–302 (1994).
Heslot, F., Baumberger, T., Perrin, B., Caroli, B. & Caroli, C. Creep, stick-slip and dry-friction dynamics: Experiments and a heuristic model. Phys. Rev. E 49, 4973–4988 (1994).
Acknowledgements
The authors thank to S. Maegawa, N. Kado and C. Tadokoro for valuable discussions and technical supports. This work was financially supported by KAKENHI (22540398), (25800220) and (26400403) from MEXT.
Author information
Authors and Affiliations
Contributions
Y.K. performed the experiments. Y.K. and K.N. prepared all figures. Y.K., K.N., M.O. and H.M. contributed to the analysis, discussions and preparation of the manuscript.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Electronic supplementary material
Supplementary Information
Supplemental Methods
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article's Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder in order to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Katano, Y., Nakano, K., Otsuki, M. et al. Novel Friction Law for the Static Friction Force based on Local Precursor Slipping. Sci Rep 4, 6324 (2014). https://doi.org/10.1038/srep06324
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep06324
This article is cited by
-
Control of Static Friction by Designing Grooves on Friction Surface
Tribology Letters (2024)
-
Static friction coefficient depends on the external pressure and block shape due to precursor slip
Scientific Reports (2023)
-
Human Head and Helmet Interface Friction Coefficients with Biological Sex and Hair Property Comparisons
Annals of Biomedical Engineering (2023)
-
2D numerical model for studying frictional sliding
Acta Mechanica Sinica (2020)
-
Fracture mechanics determine the lengths of interface ruptures that mediate frictional motion
Nature Physics (2016)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
