
Abstract
Chinese BeiDou Navigation Satellite System is officially operational as a regional constellation with five Geostationary Earth Orbit (GEO) satellites, five Inclined Geosynchronous Satellite Orbit (IGSO) satellites and four Medium Earth Orbit (MEO) satellites. Observations from the BeiDou Experimental Tracking Stations (BETS) and the IGS Multi-GNSS Experiment (MGEX) network from 1 January to 31 March 2013 are processed for orbit determination of the BeiDou constellation. Various arc lengths and solar radiation pressure parameters are investigated. The reduced set of ECOM five-parameter model produces better performance than the full set of ECOM nine-parameter model for BeiDou IGSO and MEO. The orbit overlap for the middle days of 3-day arc solutions is better than 20 cm and 14 cm for IGSO and MEO in RMS, respectively. Satellite laser ranging residuals are better than 10 cm for both IGSO and MEO. For BeiDou GEO, the orbit overlap of several meters and satellite laser ranging residuals of several decimetres can be achieved.
Similar content being viewed by others

Introduction
China is developing its own BeiDou Navigation Satellite System1 which is a useful constellation contributing to the GNSS community. BeiDou System development is divided into two phases, i.e. first the regional system and then the global system. Phase one has been accomplished with a constellation comprising five Geostationary Earth Orbit (GEO) satellites, five Inclined Geosynchronous Satellite Orbit (IGSO) satellites and four Medium Earth Orbit (MEO) satellites in orbit. After its experimental service in 2011, BeiDou has begun to provide official positioning, navigation and timing services for the Asia-Pacific area since December 2012. BeiDou satellites transmit navigation signals at three frequencies, i.e., 1561.098 MHz (B1), 1207.140 MHz (B2) and 1268.520 MHz (B3). BeiDou aims at serving various fields including civilian and scientific applications and thus high positioning quality is also required. Precise orbits are the foundation to expand its application and play an important role in complementing other GNSS.
A number of studies have been carried out on precise orbit determination of BeiDou constellation. Montenbruck et al.2 presented initial assessment of the BeiDou regional navigation satellite system and the 3D orbit overlap accuracy was 1–10 m. In Ge et al.3, independent BeiDou orbit determination was carried out using three day arcs and nine solar radiation pressure (SRP) parameters of the ECOM model4. The 3D overlap of GEO and IGSO reaches 3.3 m and 0.5 m in RMS, respectively and an almost constant disagreement in the along-track direction for GEO is found. Shi et al.5 adopted two-step GPS-assisted BeiDou orbit determination method, which is also used in orbit determination of GLONASS6, Galileo7 and QZSS8 and reached radial overlap precision at 10 cm level for BeiDou GEO and IGSO satellites. Zhao et al.9 also conducted independent BeiDou orbit determination using three day arcs, but estimated five SRP parameters of the ECOM model for all satellites and an additional constant acceleration in the along-track direction for GEO. The 3D overlap precision is about 1.8 m for GEO and 0.3 m for IGSO and MEO and radial overlap precision is better than 0.1 m for all satellites. The SLR residuals, which mainly represent radial orbit error, reach about 0.7 m for GEO C01 and 0.1 m for IGSO C08, which may indicate some unmodelled errors in orbit models, especially for GEO. Steigenberger et al.10 tested different arc lengths and SRP parameters in orbit determination of BeiDou GEO and IGSO satellites. In order to deal with strong correlations, only one SRP parameter in the direction of the Sun is estimated for the GEO satellites and three, five and nine parameters of ECOM SRP model are estimated respectively for the IGSO satellites. The results show that orbit consistency is on the several decimetre level for GEO and on the 1–2 dm level for IGSO. Independent SLR residual is about 0.15 m for GEO C01 and 0.24 m for IGSO C08. The results also reveal that there might be problems with estimating only one direct SRP parameter for GEO because the orbit-fit RMS gets bigger with increasing elevations of the Sun above the orbit plane. Liu et al.11 used one-step joint orbit determination of BeiDou and GPS as is recommended in Ineichen et al.12 for GLOANSS and GPS. With ambiguity resolution for both GPS and BeiDou IGSO and MEO satellites, an overlap precision of about 1.5 m for BeiDou GEO satellites and 0.3 m for BeiDou IGSO and MEO satellites is reached. He et al.13 conducted a series of experimental studies on the impact of the expanding tracking geometry, the involvement of MEO and integer ambiguity resolution in BeiDou orbit determination and indicated all these factors help to improve BeiDou orbit overlap precision.
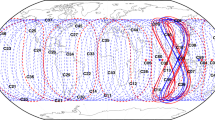
BeiDou Experimental Tracking Stations (BETS)5 is a continuous tracking network for BeiDou and GPS satellites established worldwide for scientific and engineering applications by the GNSS Research Centre of Wuhan University with cooperation partners since March 2011 and currently comprises fifteen stations. In Shi et al.14, the analysis on geometry-based residuals of double difference phase and code shows that for BeiDou un-differenced carrier phase measurements the noise is about 2–4 mm on both B1 and B2 and less than 0.45 m for B1 CA code and about 0.35 m for B2 P code. The Multi-GNSS Experiment (MGEX)15 is organized by the IGS16 to track, collate and analyse all available GNSS signals including those from the Galileo, BeiDou and QZSS systems, as well as from modernized GPS and GLONASS satellites and any space-based augmentation system (SBAS) of interest. Nine stations from the MGEX network are used in this study, which greatly extend the observation network for BeiDou satellites, especially for MEO satellites. The distribution map of the selected stations from BETS and MGEX tracking network for BeiDou orbit determination is shown in Figure 1.

Ground traces of BeiDou constellation and tracking stations.
Ground traces of satellites are represented by red dots, blue and green curves for GEO, IGSO and MEO satellites, respectively. Stations from BETS are marked in brown and that from MGEX in blue. This figure is drawn using GMT software37.
There is some difficulty and limitations in BeiDou orbit determination. The tracking network is not well distributed worldwide like GPS and GLONASS. GEO satellites move slightly relative to ground tracking stations, which results in strong correlations and IGSO satellites move slowly compared to MEO satellites. The optimal precise force model of different types of satellites, especially SRP, still needs to be further investigated. In this study, we aim at precise orbit determination of BeiDou constellation based on BETS and MGEX network through various tests and assess the orbit accuracy that can be achieved. The paper is organized as follows: data collection and processing method are described, then results about orbit overlap comparison and SLR validation are presented for different tests, discussions are given in the last section.
Data collection and processing
The observation data from the BETS and MGEX network from 1 January to 31 March 2013 are processed. Figure 1 shows the ground traces of BeiDou GEO, IGSO and MEO satellites and the tracking stations used in this paper. The station information is listed in Table 1.
The Positioning and Navigation Data Analyst (PANDA)17 software has been developed at GNSS Research Centre, Wuhan University since 2000, as a multi-functional data processing software for various fields, such as precise orbit determination of GNSS and LEO satellites, gravity field recovery, real-time precise positioning services and troposphere and ionosphere reconstruction. We have adapted the software package for BeiDou data processing in this study. There are generally three methods in precise orbit determination for BeiDou Navigation Satellite System in multi-GNSS processing. The first method is single-system mode, where all parameters are estimated using only BeiDou observations. The second method is two-step GPS-assisted, where in the first step GPS observations are used to derive parameters common to both GNSS system (like station coordinates, receiver clock, troposphere delay parameters) which is then introduced as known quantities in BeiDou processing in the second step. The third method is one-step joint orbit determination of BeiDou and other GNSS, like GPS, in one processing scheme. The second method can take advantage of the already available precise GPS orbit and clock products16 and result in a better estimation of BeiDou related parameters efficiently. Therefore, we adopt this method in this contribution.
In the first step, GPS precise point positioning (PPP)18 is carried out for the stations on the daily basis, using the ionosphere-free linear combination (LC) of L1 and L2 code and phase observations with IGS final products, solving for daily station coordinates, epoch-wise receiver clock and 2-hourly zenith tropospheric delays (ZTD). These parameters are kept fixed in orbit determination in the second step using the ionosphere-free linear combination (LC) of B1 and B2 code and phase observations, estimating only BeiDou-related parameters: satellite initial position and velocity, SRP parameters, satellite clock corrections and differential code biases (DCB). These biases originate from differences between the signals of BeiDou and GPS (B1/B2 for BeiDou and L1/L2 for GPS) which cause inter–system biases (ISB) and inter-frequency biases (IFB). BeiDou and GPS may not have the same receiver antenna phase centre, but we can ignore its impact regarding current decimetre-level BeiDou orbit precision and millimetre-level phase centre diffrence19. For all BeiDou satellites, since no accurate antenna phase centre (PCO) and phase centre variation (PCV) is available, we just use nominal PCO (0.634 m, −0.003 m, 1.075 m) provided by the satellite manufacturer and ignore satellite PCV. Important options of processing strategy about observation model and force model are listed in Table 2.
The differential code biases (DCB) have to be handled carefully in order to avoid biases in the final BeiDou orbits. In this paper, the DCB of the station Chengdu (CHDU) is fixed to zero as a reference and a piece–wise DCB with a resolution of one day is estimated for other stations. Mean DCBs and corresponding standard deviations for the experiment interval of three months are shown in Figure 2. The shaded stations are equipped with Unicore UR240 receivers while others are equipped with Trimble NetR9. The DCB consistency is about 15 ns for Unicore UR240 and 10 ns for Trimble NetR9. The mean standard deviation is about 1 ns for all stations which is stable in time for pseudorange noise level.

DCB value and standard deviation.
The mean post-fit residuals of ionosphere-free linear combination of B1 and B2 code and phase observations from the BeiDou parameter estimation are shown in Figure 3. The stations GRAC and BRST can only observe BeiDou IGSO and MEO satellites while the stations UNB3, ABMF and LMMF can only observe BeiDou MEO satellites. The mean phase residuals for all stations are about 1.8 cm, 1.3 cm and 1.4 cm for BeiDou GEO, IGSO and MEO satellites, respectively. The mean code residuals for all stations are about 1.9 m, 1.8 m and 1.9 m for BeiDou GEO, IGSO and MEO satellites, respectively. The GPS phase and code residuals of the first step are about 1 cm and 1 m respectively, i.e., the BeiDou residuals are larger than those in GPS, indicating some unmodelled errors in the BeiDou observations, like the satellite antenna phase centre and attitude behaviour. One has to note that it is generally difficult to directly reflect the orbit quality from observation residuals.

Station mean values of post-fit residuals of BeiDou GEO IGSO MEO.
Different arc lengths and sets of SRP parameters are tested for GEO, IGSO and MEO. The orbital arc lengths range from two to seven days, i.e., only one set of initial position and velocity and SRP parameters is estimated per arc. SRP is currently the largest non-conservative perturbation in orbit determination of navigation satellites which needs to be modelled accurately. The ECOM model4 comprises nine constants and periodic terms in three axes denoted as D, Y and B. D is along the satellite-sun direction and Y is along the spacecraft's solar panel axis. B is the direction perpendicular to D and Y and completes the right-handed coordinate system. SRP model has to take satellite attitudes into consideration. For BeiDou GEO satellites, orbit-normal attitude is always maintained20. The spacecraft-fixed Z axis is pointing towards geo-centre and Y axis (along the solar panels) is oriented to the Sun and normal to the orbital plane. X axis is pointing to the along-track direction and completes the right-handed coordinate system. BeiDou IGSO and MEO satellites adopt yaw-steering attitude like GPS most of the time and only turn into orbit-normal attitude when the Sun elevation about the orbital plane is less than a threshold of about four degree21,22. The ECOM model is investigated for BeiDou satellites in both yaw-steering and orbit-normal attitude. In this contribution, ECOM 5 parameter and ECOM 9 parameter are tested for IGSO and MEO satellites while different subsets of ECOM model is tested for GEO with necessary modification.
Results
BeiDou IGSO and MEO
We assess BeiDou orbit quality in both internal consistency and external validation. For internal consistency, the comparison of satellite positions in the overlapped time span between different orbit solutions is used. For orbit arcs of 3, 5 and 7 days, the last observed day and the first predicted day of orbit solutions with different arc lengths are compared with the middle day of the corresponding solutions. Figure 4 gives an example of overlap comparison for orbit solutions of 3 day arc. For orbit arcs of 2, 4 and 6 days, there are two days at the middle of each arc. The last observed day and the first predicted day of orbit solutions are compared with the first middle day of the corresponding solutions. For external validation, SLR observations are used to independently assess BeiDou orbit accuracy. The microwave-based orbits are kept fixed and residuals are computed between observed SLR values and the computed distance using BeiDou orbits.

Overlap comparison of orbit determination and prediction.
To evaluate the influence of the different number of ECOM parameters on orbit internal consistency, the mean RMS values of overlap comparison in along-track, cross-track and radial direction for BeiDou IGSO are shown in Figure 5. We take the mean RMS values of the five BeiDou IGSO (C06–C10) satellites over the experiment time span of three months excluding orbit-normal attitude periods. The along-track direction shows the largest RMS values and the radial direction shows the smallest as GPS due to observation geometry. The results show that in general the RMS of ECOM 5 parameter is smaller than that of ECOM 9 parameter. For ECOM 5-parameter model, the smallest RMS values are found at 3 day arc length and then show an almost linear increase with increasing arc length both in orbit determination and prediction. This indicates that 3 day arc length is the best for ECOM 5-parameter model in terms of internal consistency. For the ECOM 9-parameter model, the smallest RMS values are found at 5 day arc length in radial direction for both orbit determination and prediction. The RMS values are found smallest at 3 day arc length for the cross-track direction and show an almost increasing trend in the along-track direction for orbit determination.

(a) IGSO overlap comparison of the middle day with the last observed day. (b) IGSO overlap comparison of the middle day with the first predicted day. Orbit determination and one-day prediction with ECOM 5 parameter (red crosses) and ECOM 9 parameter (blue circles) are compared under different arc lengths.
As for BeiDou IGSO, the mean RMS values of overlap comparison in along-track, cross-track and radial direction for BeiDou MEO are shown in Figure 6. We take the mean RMS values of the four BeiDou MEO (C11–C14) satellites over the experiment time span of three months excluding orbit-normal attitude periods. The results also show that in general the RMS of ECOM 5 parameter is smaller than that of ECOM 9 parameter. For ECOM 5 parameter, the smallest RMS values are found at 3 day arc length in along-track and radial direction and then show an almost linear increase with increasing arc length in both orbit determination and prediction. For the cross-track direction, the smallest RMS values are found at 5 day arc length but are very close to that of 3 day arc length. We can draw the conclusion that 3 day arc length is the best for ECOM 5 parameter model for BeiDou MEO satellites in terms of internal consistency. For ECOM 9 parameter, the RMS values show an almost linear decrease with increasing arc length both in orbit determination and prediction, but the values are close to each other when it comes to arc length of more than 5 days. The smallest RMS values in the radial direction are found at 5 day arc length in both orbit determination and prediction.

(a) MEO overlap comparison of the middle day with the last observed day. (b) MEO overlap comparison of the middle day with the first predicted day. Orbit determination and one-day prediction with ECOM 5 parameter (red crosses) and ECOM 9 parameter (blue circles) is compared under different arc lengths.
From above analysis, for BeiDou IGSO and MEO satellites, the average RMS values show that ECOM 5 parameter model and 3 day arc length resulted in the best solution in terms of internal consistency in orbit determination and one-day prediction. In the next section, SLR data are analysed as an independent measurement to assess the BeiDou orbit. During the experiments, the BeiDou GEO C01, IGSO C08 and C10, MEO C11 equipped with laser retro-reflector arrays are being observed by several SLR stations coordinated by the International Laser Ranging Service (ILRS)23. Outliers exceeding 0.3 m are excluded for IGSO/MEO and those exceeding 2 m are excluded for GEO and after removal of outliers there are 328 normal points (NP) available for C01, 330 NPs for C08, 673 NPs for C10 and 430 NPs for C11 during the study period. The offsets and STDs of IGSO and MEO SLR residuals of the middle day for orbit solutions under different arc lengths and number of ECOM parameters are given in Table 3. The result is generally in good agreement with the overlap comparison in radial direction in orbit determination. For MEO C11, the mean offsets and STDs are basically better for the ECOM 5-parameter model than that for the ECOM 9-parameter under different arc lengths. The smallest residuals are found at 3 day arc length for ECOM 5 parameter and at 5 day arc length for ECOM 9 parameter, which is the same as that for the overlap comparison. For IGSO C08, the mean offsets and STDs are also better for ECOM 5 parameter than that for ECOM 9 parameter at different arc length. The smallest residuals are found at 3 day arc length for ECOM 5 parameter and at 5 day arc length for ECOM 9 parameter. For IGSO C10, the overall RMS values are smaller for ECOM 5 parameter than that for ECOM 9 parameter under different arc lengths. The smallest residuals are found at 3 day arc length for ECOM 5 parameter and at 6 day arc length for ECOM 9 parameter. As an example, the times series of SLR residuals for the 3-day orbits with the ECOM 5-parameter model are shown in Figure 7. The overall RMS values for C08, C10, C11 are 8.1 cm, 8.9 cm, 7.3 cm, respectively, which are slightly larger than that of overlap comparison.

(a) SLR residuals time series for C08. (b) SLR residuals time series for C10. (c) SLR residuals time series for C11.
From the analysis of orbit internal consistency (overlap comparison) and external validation (SLR residuals), the experiment shows that on average ECOM 5 parameter and 3-day arc length result in better orbit for BeiDou IGSO and MEO satellites. Using this strategy, orbit overlap comparison of individual satellites in yaw-steering attitude mode in the experiment period is shown in Figure 8 (a). During yaw-steering period, the 3D precision is better than 20 cm and 14 cm for IGSO and MEO, respectively and the radial precision is better than 5 cm and 3 cm for IGSO and MEO, respectively. During the experiments, several IGSO and MEO satellites went through orbit-normal attitude mode. The corresponding time periods are shown in Table 4. Using ECOM 5 parameter and 3-day arc length strategy, orbit overlap comparison of these satellites in orbit-normal attitude mode is also obtained and shown in Figure 8 (b). The 3D precision is about 30 cm and 20 cm for IGSO and MEO, respectively and the radial precision is better than 10 cm and 5 cm for IGSO and MEO, respectively. The results indicate that ECOM model with yaw-steering can be applied to IGSO and MEO in orbit-normal attitude mode although the orbit precision is slightly worse than that in yaw-steering mode, which may indicate deficiencies related to the attitude modelling.

(a) overlap comparison in yaw-steering mode. (b) overlap comparison in orbit-normal mode.
BeiDou GEO
Due to minimal changes of the observation geometry, strong correlations occur among the SRP parameters, orbital elements, satellite clocks and ambiguities in BeiDou GEO orbit determination. To deal with these correlations in GEO orbit determination, Steigenberger et al.10 estimated only one direct ECOM parameter in the direction of the Sun. The internal consistency is on the several decimetre level for GEO satellites and the overall RMS of SLR residuals is 14.7 cm from 10 normal points. The results also reveal that estimating only one direct SRP parameter might be a too simple model because the orbit-fit RMS gets bigger with larger elevation of the Sun above the orbit plane. Orbit-normal attitude is always adopted for BeiDou GEO and the solar panel is not perpendicular to the incidence sunlight. Zhao et al.9 estimated ECOM 5 parameter and an empirical constant acceleration in the along-track direction to compensate for the insufficiency of the ECOM for GEO. The overall overlap comparison is better than 200 cm in 3D and better than 10 cm in the radial direction and the overall RMS of SLR residuals is 68.5 cm from 25 normal points. The study also shows that the significant mean deviation from zero in the SLR residuals may be problematic. We propose for GEO a modified ECOM 5 parameter model with a virtual Y axis, resulting in three orthogonal axes denoted as D, Yv and B. In ECOM model for BeiDou GEO, the axis Y is perpendicular to the axis B, but it is not perpendicular to the axis D due to the orbit-normal attitude if the sun elevation about the satellite orbital plane is not zero. In our modified ECOM model, the direction of the virtual axis Yv is the cross product of the ECOM axes B and D. With this modification, the virtual axis Yv has an angle with respect to the solar panel axis which changes slowly with the elevation of the Sun above the GEO orbit plane. The virtual axis Yv is thus able to absorb the SRP force perpendicular to the solar panel introduced by reflected and diffusely scattered light photons. These three SRP models used in Steigenberger et al.10, Zhao et al.9 and this paper are denoted as model 1, model 2 and model 3, respectively. With orbit maneuvers10 excluded (three for C01, C02, C03, C05 respectively and one for C04), these three SRP models are compared in GEO orbit determination with 3-day arc length and average overlap comparison for all GEOs and SLR residuals for C01 are given in Table 5 and Figure 9, respectively and the results of other arc length show similar patterns.

(a) SLR time series for GEO C01 with SRP model 1. (b) SLR time series for GEO C01 with SRP model 2. (c) SLR time series for GEO C01 with SRP model 3.
There are 328 normal points (NP) available for C01 during the experiment period. The C01 satellite is observed by Changchun station, Shanghai station in China and Yarragadee station in Australia. The relation between expected SLR residual and orbital error in along-track, cross-track, radial direction can be derived. The orbital error vector  is expressed as follows, where A, C, R are orbital error values and
is expressed as follows, where A, C, R are orbital error values and  ,
,  ,
,  are unit vectors in along-track, cross-track, radial direction respectively.
are unit vectors in along-track, cross-track, radial direction respectively.

The unit vector in the line-of-sight direction from the GEO to one station is denoted as  . The projection of the orbital error vector onto the line-of-sight direction can be obtained by the dot product as follows.
. The projection of the orbital error vector onto the line-of-sight direction can be obtained by the dot product as follows.

Since the GEO almost does not move relative to ground stations,  ,
,  ,
,  and
and  change little and can be computed using approximate coordinates. We derive the approximate formula for the three stations as follows, which shows that SLR residuals mainly reflect the orbital error in radial direction.
change little and can be computed using approximate coordinates. We derive the approximate formula for the three stations as follows, which shows that SLR residuals mainly reflect the orbital error in radial direction.

As far as internal consistency is concerned, Model 1 has the largest overlap difference in radial direction which is about one order of magnitude larger than that of Model 2 and Model 3. The 3D precision is about 4 m, 1.5 m and 1.8 m on average, respectively. The biggest error occurs in along-track direction and it is interesting to note that precision is better in cross-track direction than that in radial direction for Model 1 and Model 2. When it comes to SLR residuals, Model 1 shows the smallest mean and RMS value while Model 2 shows the largest mean and RMS value, which is contradictory to the conclusion from the overlap comparison in radial direction. For Model 3, STD of SLR residuals is the smallest and RMS value is 14 cm larger than that of Model 1. The discrepancy between overlap comparison and SLR residuals exists in these three models and the least pronounced is for Model 1. This may indicate some unmodelled errors related to orbit dynamics or spacecraft. There should be a balance in the number and composition of SRP parameters for BeiDou GEO to account for both strong correlation and accurate description of orbit dynamics. This is still an open research problem and needs further investigations. Other SRP model and possible variations should also be studied in BeiDou orbit determination, like adjustable box-wing model24 and GSPM model25. Stable satellite clock can be used as indicators for orbit modelling and satellite clock model constraint can improve orbit accuracy26. Clock modelling may improve BeiDou orbit accuracy with proper constraints, especially for BeiDou GEO satellites. Currently the BeiDou satellite clocks are not stable enough2,10 and the future clocks are expected to do better. The proper constraints for the BeiDou satellite clock model should be adjusted accordingly and weak constraints should probably be applied to the BeiDou satellites which need further investigations. Due to the fact that GEO is basically stationary relative to the regional observing stations, the satellite orbit and clock is highly correlated. Carolipio et al.27 and Grewal et al.28 proposed an effective technique to decouple the clock error as known quantity and explored the great improvement in GEO orbit determination. As for BeiDou satellite, independent operational time synchronization system is realized by comparing two-way up-link and down-link pseudo-range. It is expected that these observations are of high quality and if the data are available, it can also be used to derive satellite clock as known quantity to improve BeiDou orbit determination, especially for GEO.
Discussion
We processed three months of observations from 23 stations in BETS and MGEX network for precise orbit determination of BeiDou regional navigation constellation of 5 GEO, 5 IGSO and 4 MEO satellites. Two-step GPS-assisted BeiDou orbit determination approach is implemented in the PANDA software and different arc lengths and sets of SRP parameters are tested for GEO, IGSO and MEO. Internal consistency and SLR validations show that for IGSO and MEO the orbit can reach accuracy on the level of 1–2 decimetres and the reduced set of ECOM 5 parameters model resulted in a better performance than the full set of ECOM 9 parameters model. For BeiDou GEO satellites, the tests show that internal precision of several meters and satellite laser ranging residuals of several decimetres can be achieved. There are still some problems in BeiDou GEO orbit determination and the discrepancy between overlap comparison and SLR residuals indicate some unknown systematic errors, such as satellite attitude maintenance deviation. Further efforts may involve two aspects. One is reducing the strong correlation among parameters due to poor observation geometry and possible solutions are satellite clock modelling or determination via extra observation, like independent time synchronization system. The other is to try to model the orbit dynamics accurately and other empirical or analytical SRP models may be adapted for BeiDou orbit determination. The proper and better SRP model for BeiDou IGSO and MEO satellites should also be further investigated.
As BeiDou is still under development, a larger tracking network with more stations and more even distribution around the world can provide better coverage for all satellites, especially for MEO. The global network can help to improve BeiDou service, like the estimation and refinement of the PCO and PCV model of satellites. Moreover, the three-frequency observation data should be fully exploited. Similarly, if more BeiDou satellites can be tracked by more SLR stations, it can provide more valuable data and powerful tool to analyse and improve BeiDou precise orbit determination.
References
Yang, Y. X. Progress, contribution and challenges of Compass/Beidou satellite navigation system. Acta Geod. Cartographica Sinica 39, 1–6 (2010).
Montenbruck, O. et al. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solutions 17, 211–222, 10.1007/s10291-012-0272-x (2013).
Ge, M., Zhang, H. P., Jia, X. L., Song, S. L. & Wickert, J. What is achievable with the current compass constellation. GPS World 1, 29–34 (2012).
Beutler, G. et al. Extended orbit modeling techniques at the CODE processing center of the International GPS Service for geodynamics (IGS): theory and initial results. Manuscr. Geod. 19, 367–386 (1994).
Shi, C. et al. Precise orbit determination of Beidou Satellites with precise positioning. Sci. China Earth Sci. 55, 1079–1086 (2012).
Kuang, D., Bar-Sever, Y. E., Bertiger, W. I., Hurst, K. J. & Zumberge, J. F. GPS-assisted GLONASS orbit determination. J. Geodesy 75, 569–574 (2001).
Steigenberger, P., Hugentobler, U., Montenbruck, O. & Hauschild, A. Precise orbit determination of GIOVE-B based on the CONGO network. J. Geodesy 85, 357–365, 10.1007/s00190-011-0443-5 (2011).
Steigenberger, P., Hauschild, A., Montenbruck, O., Rodriguez-Solano, C. & Hugentobler, U. Orbit and clock determination of QZS-1 based on the CONGO network. Navigation 60, 31–40, 10.1002/navi.27 (2013).
Zhao, Q. et al. Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J. Geodesy 87, 475–486, 10.1007/s00190-013-0622-7 (2013).
Steigenberger, P., Hugentobler, U., Hauschild, A. & Montenbruck, O. Orbit and clock analysis of Compass GEO and IGSO satellites. J. Geodesy 87, 515–525, 10.1007/s00190-013-0625-4 (2013).
Liu, Y., Lou, Y., Shi, C., Zheng, F. & Yin, Q. BeiDou regional navigation system network solution and precision analysis. Lecture Notes in Electrical Eng. 245, 173–186, 10.1007/978-3-642-37407-4_16 (2013).
Ineichen, D., Springer, T. & Beutler, G. Combined processing of the IGS and the IGEX network. J. Geodesy 75, 575–586, 10.1007/s001900000152 (2001).
He, L., Ge, M., Wang, J., Wickert, J. & Schuh, H. Experimental study on the precise orbit determination of the BeiDou navigation satellite system. Sensors 13, 2911–2928, 10.3390/s130302911 (2013).
Shi, C., Zhao, Q., Hu, Z. & Liu, J. Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites. GPS Solutions 17, 103–119, 10.1007/s10291-012-0264-x (2013).
Weber, R. IGS GNSS working group. In: Meindl, M., Dach, R. & Jean, Y. (eds) International GNSS Service Technical Report 2011. Jet Propulsion Laboratory, Pasadena, 159–163 (2012).
Dow, J., Neilan, R. E. & Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geodesy 83, 191–198, 10.1007/s00190-008-0300-3 (2009).
Liu, J. & Ge, M. PANDA software and its preliminary result of positioning and orbit determination. Wuhan University J. Nat. Sci. 8, 603–609, 10.1007/BF02899825 (2003).
Zumberge, J. F., Heflin, M. B., Jefferson, D. C., Watkins, M. M. & Webb, F. H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 102, 5005–5017, 10.1029/96JB03860 (1997).
Becker, M., Zeimetz, P. & Schönemann, E. Antenna chamber calibrations and antenna phase center variations for new and existing GNSS signals. In: IGS Workshop 2010, 28 June–2 July, Newcastle, England (2010).
Zhou, S. et al. Accuracy analyses of precise orbit determination and timing for COMPASS/Beidou-2 4GEO/5IGSO/4MEO constellation. Lecture Notes in Electrical Eng. 245, 89–102, 10.1007/978-3-642-37407-4_8 (2013).
Guo, J., Zhao, Q., Geng, T., Su, X. & Liu, J. Precise orbit determination for COMPASS IGSO satellites during yaw maneuvers. Lecture Notes in Electrical Eng. 245, 41–53, 10.1007/978-3-642-37407-4_4 (2013).
Wang, W., Chen, G., Guo, S., Song, X. & Zhao, Q. A study on the Beidou IGSO/MEO satellite orbit determination and prediction of the different yaw control mode. Lecture Notes in Electrical Eng. 245, 31–40, 10.1007/978-3-642-37407-4_3 (2013).
Pearlman, M. R., Degnan, J. J. & Bosworth, J. M. The International Laser Ranging Service. Adv. Space Res. 30, 135–143, 10.1016/S0273-1177(02)00277-6 (2002).
Rodriguez-Solano, C. J., Hugentobler, U. & Steigenberger, P. Adjustable box-wing model for solar radiation pressure impacting GPS satellites. Adv. Space Res. 49, 1113–1128, 10.1016/j.asr.2012.01.016 (2012).
Bar-Sever, Y. & Kuang, D. New Empirically Derived Solar Radiation Pressure Model for Global Positioning System Satellites. IPN Progress Report 2004, 42–159 (2004).
Weinbach, U. & Schön, S. Improved GRACE kinematic orbit determination using GPS receiver clock modeling. GPS Solutions 17, 511–520, 10.1007/s10291-012-0297-1 (2013).
Carolipio, E. M., Pandya, N. K. & Grewal, M. S. GEO orbit determination via covariance analysis with a known clock error. Navigation 48, 255–260 (2002).
Grewal, M., Carolipio, E. & Bailey, M. Comparison of GEO and GPS orbit determination. In: ION GPS 2002, 24-27 September, Portland, USA, 790–799 (2002).
Rebischung, P. et al. IGS08: the IGS realization of ITRF2008. GPS Solutions 16, 483–494, 10.1007/s10291-011-0248-2 (2012).
Wu, J. T., Wu, S. C., Hajj, G. A., Bertiger, W. I. & Lichten, S. M. Effects of antenna orientation on GPS carrier phase. Manuscr. Geod. 18, 91–98 (1993).
Boehm, J., Heinkelmann, R. & Schuh, H. Short note: a global model of pressure and temperature for geodetic applications. J. Geodesy 81, 679–683, 10.1007/s00190-007-0135-3 (2007).
Boehm, J., Niell, A., Tregoning, P. & Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 33, L7304, 10.1029/2005GL025546 (2006).
McCarthy, D. D. & Petit, G. (eds.) IERS Conventions (2003). IERS Technical Note 32, http://www.iers.org/TN32 (Date of access:20/03/2012) (2004).
Lyard, F., Lefevre, F., Letellier, T. & Francis, O. Modelling the global ocean tides: modern insights from FES2004. Ocean Dyn. 56, 394–415, 10.1007/s10236-006-0086-x (2006).
Förste, C. et al. The GeoForschungsZentrum Potsdam/Groupe de Recherche de Gèodésie Spatiale satellite-only and combined gravity field models: EIGEN-GL04S1 and EIGEN-GL04C. J. Geodesy 82, 331–346, 10.1007/s00190-007-0183-8 (2008).
Bizouard, C. & Gambis, D. The combined solution C04 for Earth orientation parameters consistent with international terrestrial reference frame 2008. IERS notice, http://hpiers.obspm.fr/iers/eop/eopc04/C04.guide.pdf (Date of access:28/02/2014) (2011).
Wessel, P. & Smith, W. H. F. New, improved version of generic mapping tools released. Eos Trans. AGU 79, 579–579, 10.1029/98EO00426 (1998).
Acknowledgements
We would like to acknowledge the efforts of the IGS MGEX campaign in providing multi-GNSS data. This work is supported by the National Nature Science Foundation of China (No: 41374034) and the National “863 Program” of China (Grant No. 2012AA12A202).
Author information
Authors and Affiliations
Contributions
Y.L. and Y.L. initial idea and data analysis; Y.L., Y.L. and C.S. wrote the manuscript; X.Y. and F.Z. helped with data analysis. All authors reviewed the manuscript.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Rights and permissions
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. The images in this article are included in the article's Creative Commons license, unless indicated otherwise in the image credit; if the image is not included under the Creative Commons license, users will need to obtain permission from the license holder in order to reproduce the image. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3.0/
About this article

Cite this article
Lou, Y., Liu, Y., Shi, C. et al. Precise orbit determination of BeiDou constellation based on BETS and MGEX network. Sci Rep 4, 4692 (2014). https://doi.org/10.1038/srep04692
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep04692
This article is cited by
-
Performance assessment of the signal-in-space ranging errors of BDS-3: statistical characterization and integrity standard
GPS Solutions (2023)
-
Estimation of antenna phase center offsets for BeiDou IGSO and MEO satellites
GPS Solutions (2020)
-
Precise point positioning with mixed use of time-differenced and undifferenced carrier phase from multiple GNSS
Journal of Geodesy (2019)
-
Three-frequency BDS precise point positioning ambiguity resolution based on raw observables
Journal of Geodesy (2018)
-
Precise orbit and clock determination for BeiDou-3 experimental satellites with yaw attitude analysis
GPS Solutions (2018)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
