
Abstract
Sensing ultra-low magnetic fields has various applications in the fields of science, medicine and industry. There is a growing need for a sensor that can be operated in ambient environments where magnetic shielding is limited or magnetic field manipulation is involved. To this end, here we demonstrate a new magnetometer with high sensitivity and wide dynamic range. The device is based on the current nonlinearity of superconducting material stemming from kinetic inductance. A further benefit of our approach is of extreme simplicity: the device is fabricated from a single layer of niobium nitride. Moreover, radio frequency multiplexing techniques can be applied, enabling the simultaneous readout of multiple sensors, for example, in biomagnetic measurements requiring data from large sensor arrays.
Similar content being viewed by others

Introduction
Ultrasensitive magnetic detection is utilized in a variety of applications, such as magnetoencephalography1, magnetocardiography2, ultra-low-field NMR3 and magnetic resonance imaging (ULF NMR and MRI)4,5,6, exploration of magnetic minerals7 and a wide range of other scientific purposes. The most established method is to use superconducting quantum interference devices (SQUIDs) based on low critical temperature superconducting materials8,9 as the sensor, featuring field sensitivity in the fT Hz−1/2 regime or below. In some applications, their high critical temperature counterparts are an option as well10. Emerging sensing techniques include magnetometers combining the giant magnetoresistance effect and a superconducting receiver coil, the mixed sensors11 and atomic magnetometers relying on the interaction of magnetic field and optically manipulated electronic spins of alkali vapour atoms12. Also, the magnetic manipulation of the density of states in normal metal–superconductor interfaces has been proposed, in a so-called superconducting quantum interference proximity transistor13.
Kinetic inductance of superconductors has been actively pursued in the fields of submillimeter-wave detection14,15 and parametric amplification16 during the last decade. There have been a few demonstrations of kinetic inductance being used as a sensing element in a magnetic field detector as well. Yet, the reported characteristics have been far inferior in comparison with competing techniques. Meservey and Tedrow17 were the first ones to observe shifts in kinetic inductance of superconducting thin film under perpendicular magnetic field, detecting a field change of 1 nT. A more advanced magnetic flux detector was proposed18, employing a scheme similar to radio frequency (RF) SQUIDs. Instead of having a tunnel junction, a thin superconducting bridge was deposited as a part of superconducting cylinder. The nonlinear relation between the kinetic inductance of the constriction and the magnetic flux applied through the cylinder was read out with a tank circuit. Later, taking advantage of the divergence of the kinetic inductance near critical temperature Tc, Ayela et al.19 applied thermal modulation to a superconducting ring to enhance its field sensitivity down to pT Hz−1/2. Recently, a set of new nonlinear kinetic inductance devices was proposed by Kher et al.20, including a magnetic field sensor.
In this article, we demonstrate a magnetometer exploiting the nonlinearity of the kinetic inductance with respect to d.c. current, often encountered in high normal resistance thin films. As opposed to ref. 18, the entire superconducting loop, having integrated tuning and matching capacitors, acts as a distributed nonlinear element. This improves the sensitivity, enables the use of large pickup sizes and simplifies the design since external tank circuit is not necessary. The device is fabricated from a single superconducting thin-film layer of NbN, simplifying the fabrication processes compared with other magnetometer technologies considerably. In addition, the technology is compatible with frequency-division multiplexing in analogy to submillimeter-wave kinetic inductance detectors21, enabling a compact readout of an array of sensors. Large sensor arrays are needed, for instance, in biomagnetic imaging systems relying on inverse mathematics in source mapping22. The device performance is evaluated both theoretically and experimentally with the results in good agreement with each other.
Results
Operating principle
Consider a superonducting loop composed of thin film with thickness h and linewidth w. When h≪λ, the current density Js can be assumed to be homogeneous within the cross-section and the magnetic flux quantization through the ring reads

where λ is the magnetic penetration depth, Is=Jswh the shielding current, Φa the applied magnetic flux, m an integer and Φ0=2.07 fWb the flux quantum. Unlike the geometric inductance Lg that is associated with the magnetic field of the ring, the kinetic inductance Lk=μ0λ2l/wh (μ0 is the vacuum permeability and l the length of the loop) stems from the motion of the Cooper pairs. Kinetic inductance becomes nonlinear with respect to shielding current Is as the kinetic energy approaches the depairing energy of the Cooper pairs16,23. With sufficiently small Is, the nonlinearity assumes a form

Here, Lk0 is the kinetic inductance at zero current and I*, a parameter usually of the order of critical current Ic, sets the scale for the nonlinearity.
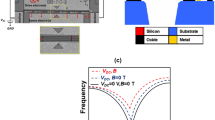
The operating principle behind the kinetic inductance magnetometer is as follows: the magnetic flux Φa applied through the loop (inductance L=Lg+Lk) generates a shielding current Is according to equation (1), which in turn modifies the inductance of the loop through equation (2). Figure 1a shows a practical realization of such a device in planar geometry along with the simplified measurement setup depicted in Fig. 1b. A square-shaped superconducting loop (width W=20 mm) has been fabricated from thin-film NbN (Tc=14 K). An interdigital capacitor C is arranged in parallel with the loop, and the formed resonator is further coupled to a transmission line (characteristic impedance Z0=50 Ω) with a matching capacitor Cc. After cooling the device below Tc, the inductance change is read out by measuring the transmission S21=2Z/(2Z+Z0) through the resonator, which near the resonance frequency  is determined by impedance (Fig. 1c)
is determined by impedance (Fig. 1c)

(a) The device contains a superconducting loop L fabricated employing a single NbN thin-film layer. The interdigital capacitors C and Cc, shown in the optical microphotograph zoom-ins, are placed inside and outside the loop, respectively. Together with the inductive loop, the capacitors form a resonator coupled to an external transmission line. A superconducting on-chip bias coil concentric with L was not employed in the experiments. (b) Two off-chip coils L1 and L2 with calibrated mutual inductances (M1 and M2) are arranged around the magnetometer loop to generate bias and excitation fluxes. An RF generator supplies excitation and reference signals for the resonator and mixer, respectively. The applied magnetic field changes the kinetic inductance of the loop affecting the transmission spectrum of the microwaves passing the resonator. The resulting signal, being proportional to the excitation voltage εin, is amplified, mixed down to d.c. and finally Fourier transformed to frequency domain. All experiments were performed at liquid helium bath temperature T=4.2 K. (c) Transmission S21 can be modelled with an equivalent circuit, which yields S21=2εout/εin=2Z/(2Z+Z0).

assuming Qi>>1. Here, Qi is the intrinsic quality factor describing the superconductor losses,  the coupling quality factor and the inductance Ltot=L/4+Lpar contains the contributions from the loop inductance and parasitics. The resonator impedance reaches a real value Zmin≈Z0Qext/(2Qi) at the resonance, creating a decline in S21 depicted in Fig. 2a,b. We quantify the magnetic bias and excitation as an average orthogonal field B0=Φa/A with A the surface area of the loop. As the applied field B0, and consequently Is (assuming m=0), is adjusted between zero and a maximum value, the resonance dip f0=ω0/(2π) shifts between points O and P, respectively. When Is is driven above Ic=10 mA (point P), the integer m assumes a new value and the current Is resets according to equation (1). For most of our devices, Is drops close to zero after exceeding the critical current and the resonance dip hops back from state P to state O. As the external field is changed further, the resonance frequency f0 starts again the approach towards point P.
the coupling quality factor and the inductance Ltot=L/4+Lpar contains the contributions from the loop inductance and parasitics. The resonator impedance reaches a real value Zmin≈Z0Qext/(2Qi) at the resonance, creating a decline in S21 depicted in Fig. 2a,b. We quantify the magnetic bias and excitation as an average orthogonal field B0=Φa/A with A the surface area of the loop. As the applied field B0, and consequently Is (assuming m=0), is adjusted between zero and a maximum value, the resonance dip f0=ω0/(2π) shifts between points O and P, respectively. When Is is driven above Ic=10 mA (point P), the integer m assumes a new value and the current Is resets according to equation (1). For most of our devices, Is drops close to zero after exceeding the critical current and the resonance dip hops back from state P to state O. As the external field is changed further, the resonance frequency f0 starts again the approach towards point P.

(a,b) Resonator transmission S21 was measured with a network analyser as a function of the screening current Is and bias field B0. (c) The intrinsic quality factor  of the resonator and the resonance frequency shift Δf0=f0(Is=0)−f0(Is) have been obtained from transmission curves of a,b (see Methods). Solid lines present polynomial fits. (d) The inductance Ltot determines the resonance frequency according to
of the resonator and the resonance frequency shift Δf0=f0(Is=0)−f0(Is) have been obtained from transmission curves of a,b (see Methods). Solid lines present polynomial fits. (d) The inductance Ltot determines the resonance frequency according to  , where C=20 pF and Cc=2.2 pF. The inductance Ltot=(Lg+Lk)/4+Lpar contains contributions from loop inductance and parasitics, where Lg=142 nH and Lpar=Lg,par+Lk0,par=40 nH with geometric inductances computed with a simulation software. The quadratic fit of d gives Lk0=147 nH and I*=34 mA for the kinetic inductance.
, where C=20 pF and Cc=2.2 pF. The inductance Ltot=(Lg+Lk)/4+Lpar contains contributions from loop inductance and parasitics, where Lg=142 nH and Lpar=Lg,par+Lk0,par=40 nH with geometric inductances computed with a simulation software. The quadratic fit of d gives Lk0=147 nH and I*=34 mA for the kinetic inductance.
The decrease in Cooper pair density ns with growing Is degrades the intrinsic quality factor Qi of the device (Fig. 2c) and enhances the resonator inductance Ltot (Fig. 2d) due to the kinetic term given by equation (2), resulting in the resonance frequency shift Δf0 (Fig. 2c). The inductance change enables the derivation of parameters Lk0=147 nH and I*=34 mA. Assuming the nominal geometry of the superconducting strip (l=80 mm, w=5 μm and h=165 nm), one can determine the penetration depth λ=1,100 nm for the NbN thin film. The value is somewhat larger than the zero-temperature magnetic penetration depth in the impure limit  , where ħ=h/(2π) is the reduced Planck constant, ρ=750±90 μΩ cm the film resisitivity at room temperature and Δ=2.5 meV the gap energy at zero temperature for NbN24.
, where ħ=h/(2π) is the reduced Planck constant, ρ=750±90 μΩ cm the film resisitivity at room temperature and Δ=2.5 meV the gap energy at zero temperature for NbN24.
Responsitivity
To calculate magnetometer responsivity ∂εout/∂B0, where εout is the output voltage of the transmission measurement, we differentiate equations (1)–(3), , . At the resonance, the responsitivity can be approximated as

where the resonator is excited with a voltage εin and the total quality factor Qt=QiQext/(Qi+Qext) along with the inductance Ltot are functions of the bias current Is. The responsitivity given by equation (4) is valid from d.c. to a roll-off frequency fr≈min{f0/(2Qt), 1/(2πτr)}, where either the electric time constant of the resonator25 or the quasiparticle recombination time τr (ref. 26) restricts the device bandwidth. Ultimately, the device gain becomes limited by the excitation εin generating an RF current (amplitude iL) through inductance Ltot. In the limit iL=2(Ic−Is), where the factor of two stems from the loop geometry, the magnetometer is driven to the normal state and the maximum gain for a given bias current Is becomes

The measured device responsitivities Gtotd|Imεout|/dB0 and Gtotd|Reεout|/dB0 are depicted in Fig. 3a,b for quadrature (Q) and in-phase (I) components, respectively. The theoretical plots, using parameters derived from the transmission measurements, follow the measured data yielding Gtot=490±30 V V−1 for the system gain, which is in reasonable agreement with the nominal value Gnom=400 V V−1. The large dynamic range of the detector is visualized with the aid of half-gain bandwidth, which converted to magnetic field gives ΔB0≈600 nT. For a constant excitation εin=6.3 mV, the current iL is a weak function of Is and can be approximated as iL≈1.3 mA. In this case, flux trapping was observed below the resonance frequency f0≈99.5 MHz corresponding to bias current of the order Is≈9.2 mA, approximately fulfilling the maximum gain condition iL~2(Ic−Is).

(a,b) The measured device responsitivities Gtotd|Imεout|/dB0 and Gtotd|Reεout|/dB0 representing quadrature and in-phase components, respectively, are shown along with theoretical fits (solid lines), where the total voltage gain Gtot and bias current Is were chosen as fitting parameters (see Methods). The total gain Gtot=GLmixLatt includes the contributions from the amplification G, mixer conversion loss Lmix and other attenuation Latt present in the setup. In a, the equation (4) scaled with Gtot=490±30 V V−1 gives an estimate for the Q-component at resonance (red dashed line), in reasonable agreement with the measurements. The half-gain bandwidth for the largest peak expressed in terms of magnetic field is ΔB0≈600 nT.
Noise
The fluctuation mechanisms peculiar to kinetic inductance devices are related to the dynamics of quasiparticle excitations: the thermal motion of the unpaired electrons and the stochastics of the quasiparticle density. The former, combined with the contribution from thermal fluctuations of the attenuated feeding line, generates Johnson voltage noise  on resonance, where kB is the Boltzmann constant. Taking into account the coupling to the input of the amplifier and utilizing the equation (4), this can be mapped to magnetic field noise at the magnetometer loop
on resonance, where kB is the Boltzmann constant. Taking into account the coupling to the input of the amplifier and utilizing the equation (4), this can be mapped to magnetic field noise at the magnetometer loop

The generation–recombination of the charge carriers, on the other hand, leads them to fluctuate according to spectral density Sqp(ω)=4Nqpτr/(1+(ωτr)2), where Nqp=V nqp is the number of quasiparticles in the superconductor volume V. The field noise due to the generation–recombination process can be evaluated in the low-frequency limit f≪fr as (see Methods)

where nqp is the density of quasiparticles.
To study the noise properties, a device similar to the one characterized above was operated without external magnetic bias, using persistent current Is=mΦ0/(Lg+Lk) with finite m to determine the operating point. The RF frequency and amplitude were set to approximately maximize the field responsitivity Gtotdεout/dB0, and the experimental noise, shown in Fig. 4a, was recorded at high-gain operating point Is=7 mA. This is scaled to equivalent magnetic field noise  in Fig. 4b. The white noise above 1 kHz corresponds to about 32±2 fT Hz−1/2. The error limit stems from the uncertainty in mutual inductance M1 calibration (Fig. 1b; see Methods). The peaks visible in the spectrum are mainly multiples of 50 Hz and interference located at low frequencies and from frequencies close to the carrier.
in Fig. 4b. The white noise above 1 kHz corresponds to about 32±2 fT Hz−1/2. The error limit stems from the uncertainty in mutual inductance M1 calibration (Fig. 1b; see Methods). The peaks visible in the spectrum are mainly multiples of 50 Hz and interference located at low frequencies and from frequencies close to the carrier.

(a) The measured spectral density of the equivalent voltage noise  at high (Is=7 mA, black) as well as zero (Is=0 mA, red) field responsitivity. The measurement without the sensor yielded 540 nV Hz−1/2 above 1 kHz and 2 μV Hz−1/2 at 10 Hz (not shown here). (b) The magnetic field noise
at high (Is=7 mA, black) as well as zero (Is=0 mA, red) field responsitivity. The measurement without the sensor yielded 540 nV Hz−1/2 above 1 kHz and 2 μV Hz−1/2 at 10 Hz (not shown here). (b) The magnetic field noise  for Is=7 mA (black), the field noise
for Is=7 mA (black), the field noise  from rectification (equation (9), green) and theoretical sensor contribution dominated by the Johnson noise (dashed line).
from rectification (equation (9), green) and theoretical sensor contribution dominated by the Johnson noise (dashed line).
To investigate the role of the electronics and any potential excess noise mechanisms, the noise spectrum was also recorded in a zero field-responsivity operating point Is=0 mA (Fig. 4a). Due to the similarity of the data at zero and finite field responsivity, we can exclude any noise mechanism related to random flux variations, such as the movement of trapped flux27 or fluctuating spins of localized electrons on thin-film surfaces28, as the limiting factor in the experimental noise. Furthermore, we can also exclude the effect of parametric fluctuation of I*, since the inductance is to first order independent of I* at Is=0. After removing the sensor from the system, comparable noise values were measured for the setup, see Fig. 4. We attribute the slight difference to stem from the difference in the impedance levels with respect to the amplifier noise optimum, as the source impedance on resonance is lower. A mechanism increasing the field noise at high-gain operating point is the RF amplitude fluctuations, manifesting itself through current rectification due to nonlinear inductance at high readout power, see Methods for details. The amplitude noise of the RF source was measured and an estimate of its (insignificant) contribution is shown in Fig. 4b. Using the device parameters and equations (6) and (7), we can calculate the theoretical noise floor of the sensor. The dominant contribution is the thermal noise  . The contribution of generation–recombination noise
. The contribution of generation–recombination noise  is negligible as derived in the Methods. Therefore, after evaluating the magnitude of all the known noise processes, it is reasonable to conclude that the measured experimental noise is limited by the electronics.
is negligible as derived in the Methods. Therefore, after evaluating the magnitude of all the known noise processes, it is reasonable to conclude that the measured experimental noise is limited by the electronics.
Discussion
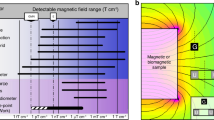
The geometry and the material of the kinetic inductance magnetometer correspond to those used in the pickup loops of SQUID magnetometers. Therefore, together with the results obtained from the noise measurements, low-frequency noise similar to that of SQUIDs can be anticipated. This should enable biomagnetic measurements at low frequencies, down to <1 Hz (magnetoencephalography or magnetocardiography) or in the range of ~kHz (ULF NMR and MRI). In comparison with SQUIDs, additional benefits include a high dynamic range, tolerance against ambient magnetic fields and immunity to RF interference. For the devices reported here, the dynamic range is several hundreds of nanotesla, outperforming typical SQUID magnetometers operated without feedback by two orders of magnitude. So far, the operation in Earth’s magnetic field has been verified, although the detailed characterization was done in shielded environment. The operability without shielding in higher ambient magnetic fields is expected, in contrast to SQUIDs for which the limiting factor is the magnetic penetration through the Josephson junction barrier, suppressing responsivity at fields of the order of Φ0/(λd), where d is the dimension of the Josephson junction. The ambient field tolerance should be beneficial for techniques such as ULF MRI, where the recovery of the sensor after a relatively high magnetic field pulse is required. In planar unshielded SQUIDs, the large pulse typically suppresses the field responsivity as the magnetic flux trapped to superconductors couples to the junction29. Furthermore, unlike the SQUIDs30, the device should be insensitive to interference beyond fr, except in the narrow bandwidth of the resonator.
Methods
General
The experiments were performed in liquid helium using a cryoprobe equipped with two coaxial RF lines for the transmission measurement of the resonator as well as two d.c. lines for magnetic field generation. A magnetic shield made of Pb and cryoperm was mounted around the sample, resulting in ambient noise level below 5 fT Hz−1/2 in the white region measured with a SQUID magnetometer.
Fabrication
The NbN films were formed by reactive sputtering of niobium in nitrogen atmosphere on thermally oxidized silicon substrates. The devices were patterned through optical lithography and reactive-ion etching. The critical temperature and the resistivity of the film were verified by measuring the resistance as a function of temperature from reference structures on the same wafer as the magnetometers.
Transmission measurements
The field dependency of the device shown in Fig. 2 was characterized in transmission measurements. The bias field was varied by tuning the d.c. voltage supplied through resistors 2R1=300 Ω and recording the corresponding transmission spectra with a network analyser. The spectra were then used for fitting the transmission S21=2εout/εin=2Z/(2Z+Z0) (Fig. 1c), where the complete impedance of the capacitively coupled resonator

was employed. Capacitor values measured with an impedance analyser from similar test structures were assumed (Cc=2.2 pF and C=20 pF), while resonance frequency  and quality factor
and quality factor  were used as fitting parameters. The amplitude of the transmission was fixed to unity sufficiently far away from the resonance. The best fit was achieved with Z0=63 Ω. As a result, the curves of Fig. 2c were obtained. Solid lines represent polynomial fits containing all the necessary information for reproducing the transmission curves of Fig. 2a,b.
were used as fitting parameters. The amplitude of the transmission was fixed to unity sufficiently far away from the resonance. The best fit was achieved with Z0=63 Ω. As a result, the curves of Fig. 2c were obtained. Solid lines represent polynomial fits containing all the necessary information for reproducing the transmission curves of Fig. 2a,b.
Responsitivity measurements
The device responsivities Gtotdεout/dB0 were measured with the setup of Fig. 5a. Two channels of an RF generator provide signals for excitation εRF=ε0,RF sin(ωRFt) of the resonator and for a reference εLO=ε0,LO sin(ωLOt+φ) of the mixer. The transmitted signal is amplified at room temperature with a low-noise amplifier and mixed down to d.c. (ωLO=ωRF). The d.c. signal is low-pass filtered, amplified and, finally, Fourier transformed to frequency domain. An attenuator (−40 dB) was placed at low temperature end of the input to reduce the noise originating from the room-temperature electronics and wiring.

To eliminate the phase noise between LO and RF signals present in the responsitivity measurements (a), a single signal generator was adopted for the noise measurements (b).
The phase φ of the local oscillator (LO) was first manually tuned close to a value φ=φmax, where a maximum response (quadrature (Q) component) at a given resonance frequency f0 is obtained. The responsitivity was also recorded at −π/2 offset giving the approximate in-phase (I) component. The IQ data were rotated in post processing to comply with the accurate value of φmax, yielding the plots in Fig. 3. The root mean squared value of the carrier signal  was set to 0.88 V corresponding to
was set to 0.88 V corresponding to  after the attenuators. Fitting was performed to measured data using functions of the form
after the attenuators. Fitting was performed to measured data using functions of the form  (Q-component) and
(Q-component) and  (I-component) with Gtot and Is selected as fitting parameters. Here transmission S21 was computed using the fits of Fig. 2c and the total voltage gain Gtot=GLmixLatt includes contributions from the amplifiers G, mixer insertion loss Lmix and other attenuation Latt present in the setup. The bias current Is values for each plot are shown in the inset of Fig. 3a and the total gain Gtot=490±30 V V−1, which is close to the nominal gain Gnom=400 V V−1 assuming G=62 dB, Lmix=−8 dB and Latt=−2 dB.
(I-component) with Gtot and Is selected as fitting parameters. Here transmission S21 was computed using the fits of Fig. 2c and the total voltage gain Gtot=GLmixLatt includes contributions from the amplifiers G, mixer insertion loss Lmix and other attenuation Latt present in the setup. The bias current Is values for each plot are shown in the inset of Fig. 3a and the total gain Gtot=490±30 V V−1, which is close to the nominal gain Gnom=400 V V−1 assuming G=62 dB, Lmix=−8 dB and Latt=−2 dB.
Noise measurements
For the noise measurements, the measurement setup was modified in the following ways (Fig. 5b). A nominally identical sample with slightly better responsitivity was adopted for the measurements. To remove the phase noise between the LO and the carrier, the two signals were obtained from a splitter supplied by a single RF voltage source. Furthermore, an adjustable attenuator was installed to room temperature to control the excitation voltage εin. The device was operated in so-called persistent current mode, in which the magnetic flux mΦ0 within the loop alone determines the operating point Is=mΦ0/(Lg+Lk), eliminating the noise of the d.c. flux bias. A signal composed mainly of the Q-component was chosen for the measurement by using cables of proper length acting as a delay line. The device gain was set close to the maximum by biasing the device at the resonance frequency and adjusting the excitation voltage εin to 12 mV. The voltage noise at the output was measured both for high (Is=7 mA) and zero (Is=0 mA) field responsitivity (Fig. 4a). The device gain was checked before and after the noise measurement yielding Gtotdεout/dB0=20.3 V μT−1.
At our carrier frequency corresponding to the transmission minimum, the I-component responsivity is close to zero and the output is first-order insensitive to RF amplitude fluctuations. However, the inductance nonlinearity partially rectifies the RF excitation signal. In equation (2), the RF excitation current in the magnetometer loop can be contained by additional current term (iL/2) sin(ωt), where the factor of 1/2 stems from the fact that the current is divided into two branches. Thus, generalizing  , replacing Is by
, replacing Is by  in equation (2) and omitting extra RF terms, we get Lk=Lk0(1+(Is/I*)2)+LRF with LRF=(Lk0/8)(iL/I*)2. If there now exists RF amplitude fluctuation
in equation (2) and omitting extra RF terms, we get Lk=Lk0(1+(Is/I*)2)+LRF with LRF=(Lk0/8)(iL/I*)2. If there now exists RF amplitude fluctuation  , it can be mapped to equivalent magnetic field noise
, it can be mapped to equivalent magnetic field noise  , which is readily expressed as
, which is readily expressed as

Now the relative fluctuation  can be traced back to RF source, that is,
can be traced back to RF source, that is,  . We measured this with the excitation level used in noise measurements and the result was converted to
. We measured this with the excitation level used in noise measurements and the result was converted to  using equation (9) and iL≈3 mA, see Fig. 4b.
using equation (9) and iL≈3 mA, see Fig. 4b.
Calibration of mutual inductances
Two printed circuit board (PCB) coils (inductances L1 and L2) were arranged around the sample to introduce magnetic bias and calibration fields. Mutual inductances M1 and M2 between the magnetometer and the off-chip coils were evaluated using the analytic formula of magnetic field around a straight wire of finite length

where the current I flows from one end (point A) of the wire to the other (point B) and the magnetic field is calculated a distance r away from the wire (point C) defined by the angles θ1=∠(ABC) and θ2=∠(CAB). The model was found to reproduce the field profile measured with a magnetic field sensor (Alphalab Gaussmeter GM2) ~1 mm above the PCB, yielding M1=50±3 nH and M2=20±1.5 nH, where the error limits are related to the uncertainties in the position of the magnetometer. The calculated M1, combined with the derived inductances Lg and Lk0, gives Ic=10 mA for the magnetometer loop in line with the critical current measurements. Furthermore, the calibration of M2 seems also accurate as discovered from responsitivity measurements with Gtot≈Gnom.
Generation–recombination noise
We derive the equivalent magnetic field noise SB,gr stemming from the quasiparticle number fluctuation SN(ω)=4nqpVτr/(1+(ωτr)2). The kinetic inductance can be estimated as Lk≈(n/ns)Lk0=(1+nqp/ns)Lk0≈(1+Nqp/(V n))Lk0, where we approximate ns≈n, that is, a majority of the charge carriers is paired. The inductance fluctuation is derived as SL(ω)=(∂L/∂Nqp)2SN(ω)=(Lk0/V ns)2SN(ω). Equation (7) follows now from SB,gr(ω)=(∂L/∂B0)−2SL(ω) assuming  .
.
Thus, the generation–recombination noise depends on parameters ns, nqp and τr. As noted above, we assume that the paired carrier density ns approximately equals the total density n of electrons: ns≈n~1029 1 per m3 (ref. 31). For our NbN films, the Cooper pair density is empirically found to follow relation ns/(ns+nqp)=1−(T/Tc)2.5 (ref. 15). Using this combined with the relation of the intrinsic quality factor Qi=ns/(nqpω0τqp), where τqp is the quasiparticle thermalization time with a superconductor lattice, and the current dependency of Qi gives nqp/ns≈0.1. The recombination time can be expressed as26

where τ0 is material-dependent electron–phonon interaction time and Δ is the energy gap of the superconductor. For NbN, an empirical relation τ0[s]=5 × 10−10T[K]−1.6 is typically found valid32 leading to τ0≈50 ps. The zero-temperature energy gap for NbN is Δ=2.5 meV (ref. 24). Although this is likely somewhat suppressed at the operating point, it will give a worst-case estimate for the noise. Finally, we get τr≈1.5 ns and  using dL/dB0≈3 mH T−1 at operating point.
using dL/dB0≈3 mH T−1 at operating point.
Additional information
How to cite this article: Luomahaara, J. et al. Kinetic inductance magnetometer. Nat. Commun. 5:4872 doi: 10.1038/ncomms5872 (2014).
References
Hämäläinen, M., Hari, R., Ilmoniemi, R. J., Knuutila, J. & Lounasmaa, O. V. Magnetoencephalography theory, instrumentation and applications to noninvasive studies of the working human brain. Rev. Mod. Phys. 65, 413–497 (1993).
Seki, Y., Kandori, A., Suzuki, D. & Ohnuma, M. Open-type magnetocardiograph with cylindrical magnetic shield. Appl. Phys. Lett. 86, 243902 (2005).
McDermott, R. et al. Liquid-state NMR and scalar couplings in microtesla magnetic fields. Science 295, 2247–2249 (2002).
McDermott, R. et al. Microtesla MRI with a superconducting quantum interference device. Proc. Natl Acad. Sci. USA 101, 7857–7861 (2004).
Zotev, V. S. et al. Microtesla MRI of the human brain combined with MEG. J. Magn. Reson. 194, 115–120 (2008).
Vesanen, P. T. et al. Hybrid ultra-low-field MRI and magnetoencephalography system based on a commercial whole-head neuromagnetometer. Magn. Reson. Med. 69, 1795–1804 (2013).
Chwala, A. et al. Low temperature SQUID magnetometer systems for geophysical exploration with transient electromagnetics. Supercond. Sci. Technol. 24, 125006 (2011).
Clarke, J. & Braginski, A. I. The SQUID Handbook Wiley-VCH Verlag GmbH & Co. KGaA (2006).
Ryhänen, T., Seppä, H., Ilmoniemi, R. & Knuutila, J. SQUID magnetometers for low-frequency applications. J. Low Temp. Phys. 76, 287–386 (1989).
Faley, M. I. et al. High-Tc DC SQUIDs for magnetoencephalography. IEEE Trans. Appl. Supercond. 23, 1600705 (2013).
Pannetier, M., Fermon, C., Le Goff, G., Simola, J. & Kerr, E. Femtotesla magnetic field measurement with magnetoresistive sensors. Science 304, 1648–1650 (2004).
Kominis, I. K., Kornack, T. W., Allred, J. C. & Romalis, M. V. A subfemtotesla multichannel atomic magnetometer. Nature 422, 596–599 (2003).
Giazotto, F., Peltonen, J. T., Meschke, M. & Pekola, J. P. Superconducting quantum interference proximity transistor. Nat. Phys. 6, 254–259 (2010).
Day, P. K., LeDuc, H. G., Mazin, B. A., Vayonakis, A. & Zmuidzinas, J. A broadband superconducting detector suitable for use in large arrays. Nature 425, 817–821 (2003).
Timofeev, A. V. et al. Submillimeter-wave kinetic inductance bolometers on free-standing nanomembranes. Supercond. Sci. Technol. 27, 025002 (2014).
Eom, B. H., Day, P. K., LeDuc, H. G. & Zmuidzinas, J. A wideband, low-noise superconducting amplifier with high dynamic range. Nat. Phys. 8, 623–627 (2012).
Meservey, R. & Tedrow, P. M. Measurements of the kinetic inductance of superconducting linear structures. J. Appl. Phys. 40, 2028–2034 (1969).
Goodkind, J. M. & Stolfa, D. L. The superconducting magnetic flux detector. Rev. Sci. Instrum. 41, 799–807 (1970).
Ayela, F., Bret, J. L. & Chaussy, J. Absolute magnetometer based on the high-frequency modulation of the kinetic inductance of a superconducting thin film. J. Appl. Phys. 78, 1334–1341 (1995).
Kher, A., Day, P., Eom, B. H., Leduc, H. & Zmuidzinas, J. Superconducting nonlinear kinetic inductance devices. EUCAS (2013).
McHugh, S. et al. A readout for large arrays of microwave kinetic inductance detectors. Rev. Sci. Instrum. 83, 044702 (2012).
Sarvas, J. Basic mathematical and electromagnetic concepts of the biomagnetic inverse problem. Phys. Med. Biol. 32, 11–22 (1987).
Annunziata, A. J. et al. Tunable superconducting nanoinductors. Nanotechnology 21, 445202 (2010).
Kamlapure, A. et al. Measurement of magnetic penetration depth and superconducting energy gap in very thin epitaxial NbN films. Appl. Phys. Lett. 96, 072509 (2010).
Zmuidzinas, J. Superconducting microresonators: physics and applications. Annu. Rev. Condens. Matter Phys. 3, 169–214 (2012).
de Visser, P. J. et al. Number fluctuations of sparse quasiparticles in a superconductor. Phys. Rev. Lett. 106, 167004 (2011).
Ferrari, M., Kingston, J. J., Wellstood, F. C. & Clarke, J. Flux noise from superconducting YBa2Cu3O7−x flux transformers. Appl. Phys. Lett. 58, 1106–1108 (1991).
Choi, S., Lee, D.-H., Louie, S. G. & Clarke, J. Localization of metal-induced gap states at the metal-insulator interface: origin of flux noise in SQUIDs and superconducting qubits. Phys. Rev. Lett. 103, 197001 (2009).
Luomahaara, J. et al. All-planar SQUIDs and pickup coils for combined MEG and MRI. Supercond. Sci. Technol. 24, 072020 (2011).
Koch, F. C. et al. Effects of radio frequency radiation on the DC SQUID. Appl. Phys. Lett. 65, 100–102 (1994).
Chockalingam, S. P., Chand, M., Jesudasan, J., Tripathi, V. & Raychaudhuri, P. Superconducting properties and Hall effect of epitaxial NbN thin films. Phys. Rev. B 77, 214503 (2008).
Gousev, Y. P. et al. Broadband ultrafast superconducting NbN detector for electromagnetic radiation. Appl. Phys. Lett. 75, 3695–3697 (1994).
Acknowledgements
We thank Andrey Timofeev, Panu Helistö, Mikko Kiviranta and Arttu Luukanen for useful discussions as well as Paula Holmlund and Harri Pohjonen for the help in sample preparation. The work was financially supported by the Academy of Finland through Centre of Excellence in Low Temperature Quantum Phenomena and Devices.
Author information
Authors and Affiliations
Contributions
J.L. carried out the experiments in the supervision of J.H., and analysed the data. He is also the principal writer of the manuscript. J.H. and V.V. developed the theory, designed the devices and contributed to writing the manuscript. L.G. was responsible for device fabrication.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Rights and permissions
About this article

Cite this article
Luomahaara, J., Vesterinen, V., Grönberg, L. et al. Kinetic inductance magnetometer. Nat Commun 5, 4872 (2014). https://doi.org/10.1038/ncomms5872
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/ncomms5872
This article is cited by
-
Coupling and readout of semiconductor quantum dots with a superconducting microwave resonator
Science China Physics, Mechanics & Astronomy (2023)
-
A Kinetic Inductance Ammeter with Coplanar Waveguide Input Structure for Magnetic Flux Focusing
Journal of Low Temperature Physics (2018)
-
Evaluation of realistic layouts for next generation on-scalp MEG: spatial information density maps
Scientific Reports (2017)
-
High operating temperature in V-based superconducting quantum interference proximity transistors
Scientific Reports (2017)
-
nanoSQUID operation using kinetic rather than magnetic induction
Scientific Reports (2016)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
